论文发表 || 如何基于累积过程变换学习弱非线性振动方程(EvLOWN)
以下文章来源于“同济风工程”,仅做学术分享
原文链接:https://mp.weixin.qq.com/s/d4XuSfRFRZWQVbaLKzCwBQ
Teng Ma, Ting-ting Gao, Wei Cui*, Attilio Frangi, Gang Yan*, Lin Zhao*. Encoding Cumulation to Learn Perturbative Nonlinear Oscillatory Dynamics[J]. Advanced Science, 2026.
链接:
https://pan.baidu.com/s/17yultkgk2yUGNMZJVW0V3w
提取码: 4hxu
原文下载:
https://advanced.onlinelibrary.wiley.com/doi/10.1002/advs.202519707
开源代码:https://github.com/TengMa25/EvLOWN
导读
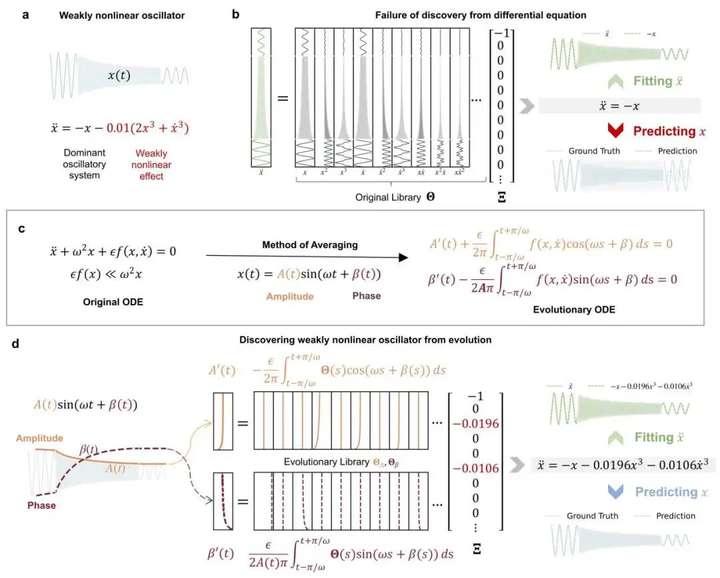
自主物理规律发现是AI for Science的核心研究内容之一。近年来,以符号回归(Symbolic Regression)和稀疏识别(SINDy)为代表,数据驱动的控制方程推断取得了显著进展,提供了从数据中揭示可解释动力学规律的新兴框架,并成功应用于复杂网络、物理、化学、生物、工程等多学科中。然而,方程推断理论难以识别系统中存在的弱非线性效应。弱非线性效应指动力系统中的扰动、非简谐势或弱耦合作用,数学上表现为控制方程中小数量级的效应。既有的方程推断方法以寻找最优(简洁且准确)的方程形式来表征动力系统控制方程,它会自然的忽略对拟合准确率贡献微小的弱非线性效应。更具有挑战性的是,弱非线性本质上是控制方程中的高阶小量,极易被噪声掩埋。
弱非线性vs强非线性van der Pol振动:随着噪声强度增大弱非线性观测数据趋近白噪声,基本不包含任何有效信息以供识别。
2026年3月6日,同济/西大风工程赵林教授研究团队,联合同济大学物理学院的严钢教授及其团队、米兰理工大学Attilio Frangi教授,在国际顶级期刊Advanced Science上发表题为《Encoding Cumulation to Learn Perturbative Nonlinear Oscillatory Dynamics》的研究论文。论文提出了名为EvLOWN的数据驱动弱非线性振子方程推断理论,利用平均法近似重构了推断方程优化目标,通过累积过程变换扩展了微小效应在噪声下的可推断性边界,与既有方法相比提升了3个数量级,并成功应用于轨道动力学和流固耦合力学等多个工程领域。
EvLOWN机器学习系列方法报告(Brown 大学数学系CRUNCH Seminars)
一、EvLOWN方法
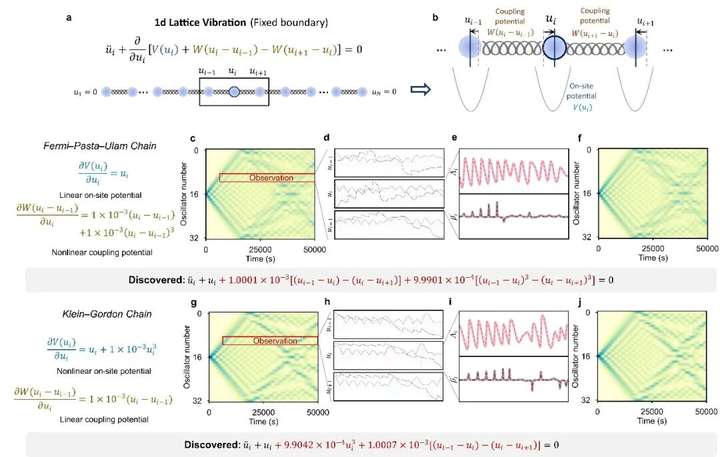
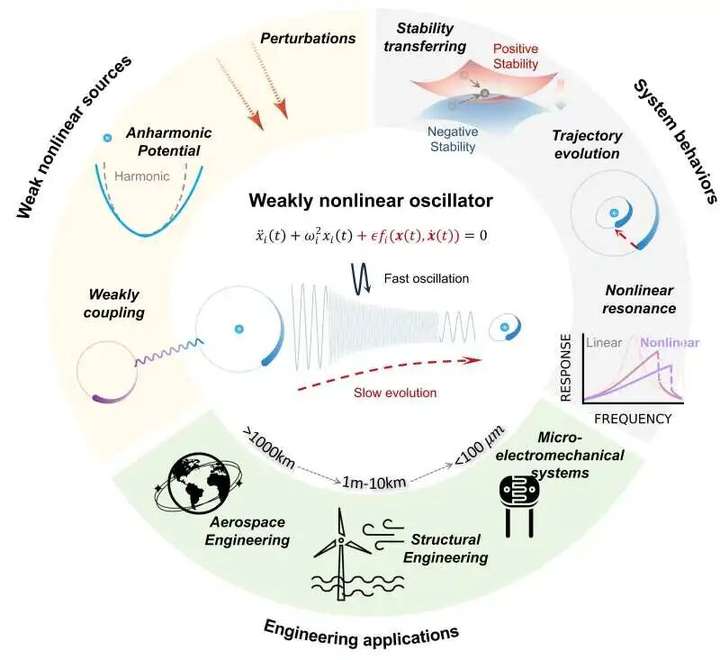
弱非线性振子表现出典型的“双时间尺度”响应,即在快速简谐振动的同时,其振幅和相位在慢速演化。作者通过平均法建立了控制方程中弱非线性项与动力系统振幅、相位慢速演化之间的数学关系。平均法是非线性振动领域一种经典的近似求解方法,而本文中作者将其应用于方程识别的反问题。在使用平均法后,原始的二阶振动方程可以等价重构为振幅和相位的一阶慢速演化方程。EvLOWN实现了优雅的尺度分离,即演化方程中主导的线性项消失了,仅存在小数量级的弱非线性项。在演化方程上做识别天然规避了小数量级被主导项或噪声掩盖的问题,随后仅需要寻找一组稀疏系数向量同时满足振幅和相位的演化方程,即可以直接还原弱非线性振子的控制方程。
二、数值验证
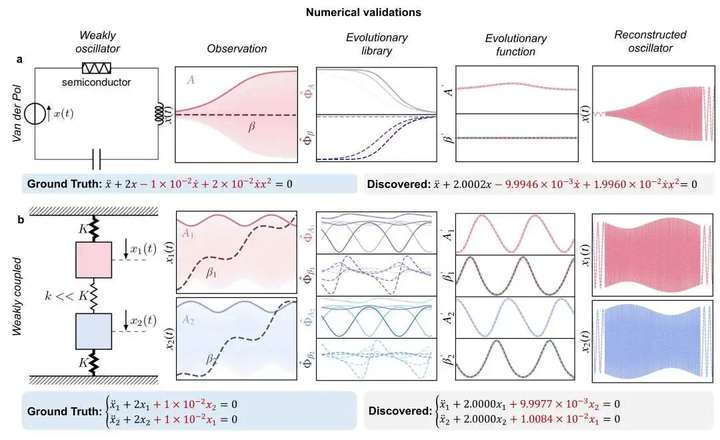
首先在经典的弱非线性振子上进行了数值算例验证,包括低维算例(图2)和高维算例(图3)。证明了EvLOWN可以在高阶多项式函数库中精准发现相比于主导项小2-3个数量级的弱非线性效应。
三、对比实验
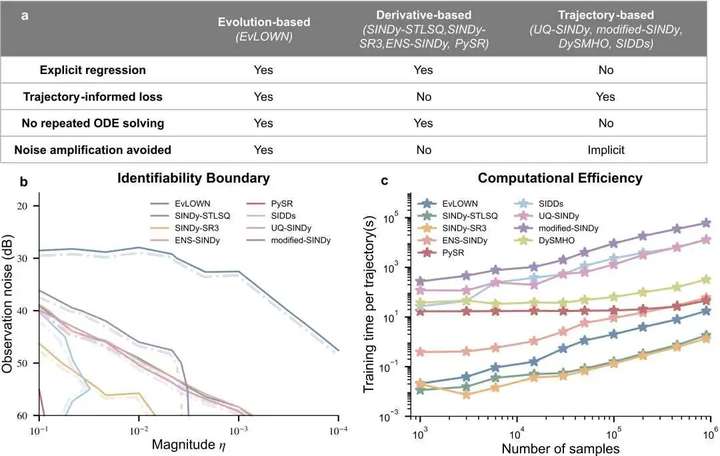
为了证明EvLOWN在弱非线性系统识别上的优势,作者以van der Pol振子为基础设计了一个标准Benchmark对比试验。考虑了弱非线性强度(1e-1~1e-4)和观测噪声(60-20dB)两个参数,共计90个参数组合。在每个参数组合下随机生成100组训练数据,记录不同方法在这些参数组合下的识别成功率和计算效率作为对比指标。
对比试验共包含9种不同的方程推断方法,按优化目标区分为:拟合微分方程(SINDy-STLSQ、SINDy-SR3、ENS-SINDy、PySR)、拟合动力响应(UQ-SINDy、modified-SINDy、DySMHO、SIDDs)和拟合慢速演化(EvLOWN)。图4b展示了在不同噪声强度和弱非线性强度下的算法可识别边界(识别成功率=50%),本文提出的EvLOWN方法相比于其他方法极大的拓展了弱非线性小量的可识别边界。此外,EvLOWN还保持了较高的计算效率(图4c)。
四、工程应用
弱非线性振动在自然世界和现实工程中广泛存在,因为微小扰动、非简谐势(非线性刚度)和弱耦合作用普遍存在且难以避免。对弱非线性的误判或忽略会导致对系统行为的误判(稳定边界、长期轨迹和激励响应),这对工程系统是致命的。弱非线性主导的工程对象在不同尺度中均有体现:大尺度上,天体力学中的线性主导是主要天体提供的引力,而弱非线性作用是其他天体的引力作用、主天体的地球形状摄动效应(质量不均匀)、大气阻力等效应;中尺度上,结构工程中的线性主导是结构质量和刚度产生的线性频率,而弱非线性作用指小阻尼和空气动力学作用;小尺度上,微机电系统的主导是结构频率作用,而弱非线性作用是材料和几何非线性。
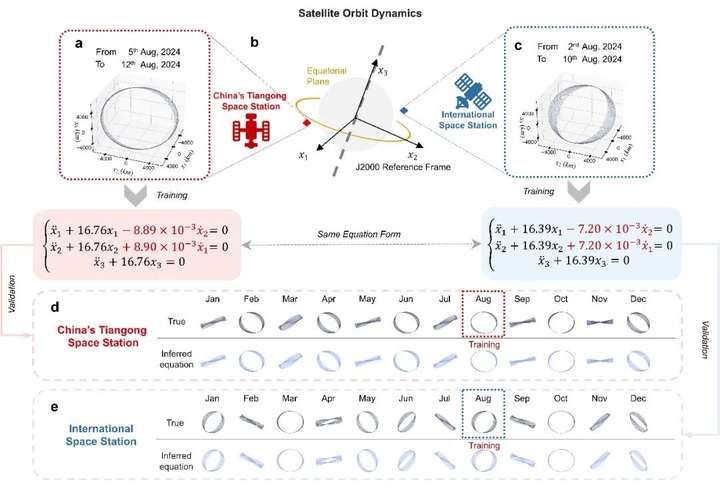
本文中涉及两个真实系统算例。第一个是空间站轨道动力学,包含地球的两个在役空间站。从公开星历数据中收集了1周左右的空间站运行轨迹数据用于独立训练,分别得到了其控制方程。随后用控制方程预测了过去一年里不同时间段的空间站运行轨迹,与记录数据匹配良好,证明EvLOWN精准捕捉了空间站轨道动力学的扰动效应(地球形状摄动和大气阻力)。
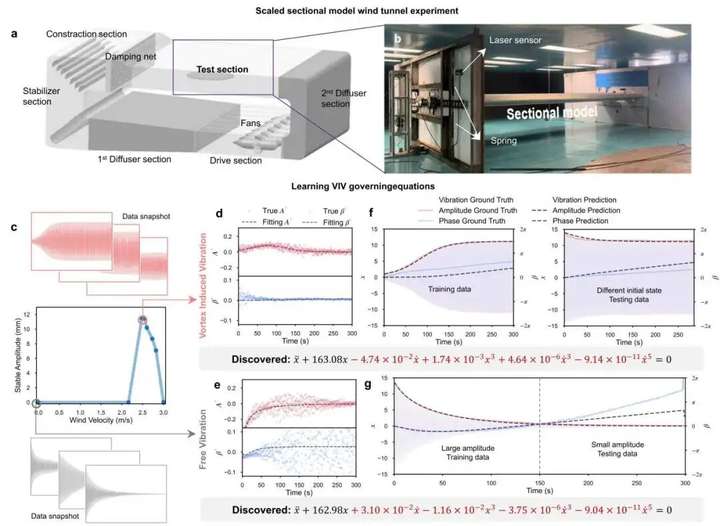
第二个真实案例是桥梁涡激振动动力学,其原型为中国东南沿海的西堠门公路大桥。为了研究其涡激振动现象,作者完成了1:20的大比例节段风洞试验(图7b),收集其在不同风速下的振动响应(图7c),并使用EvLOWN学习其控制方程。为了验证方程有效性,在试验中构建了不同初始状态下的振动响应,一组用于训练(图7f,g左),一组用于测试(图7f,g右)。
五、结论与展望
本文提出了累积过程变换的方法以识别动力系统的弱非线性效应,并成功应用于晶格振动、轨道动力学和涡激振动等多个学科领域中。在数值对比验证中证明了编码累计效应相较于其他的方程推断方法具有显著优势。
本研究也具有一定局限性,首先并没有考虑随机动力系统(SDE)的情况,此外对动力系统响应的形式假设限制了方法适用性局限在振动系统中而不是广义的动力学系统。这也是我们未来要攻克的方向。
作者简介:马腾,同济大学/米兰理工大学 联合培养双学位博士研究生;高婷婷,美国东北大学网络科学实验室博士后;崔巍*,同济大学土木工程学院副教授;Attilio Frangi,米兰理工大学土木与环境系教授;严钢*,同济大学物理科学与工程学院教授;赵林*,同济大学/广西大学 土木工程学院教授。
相关链接

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)