二自由度机械臂模型预测控制(MPC)系统实现说明
·
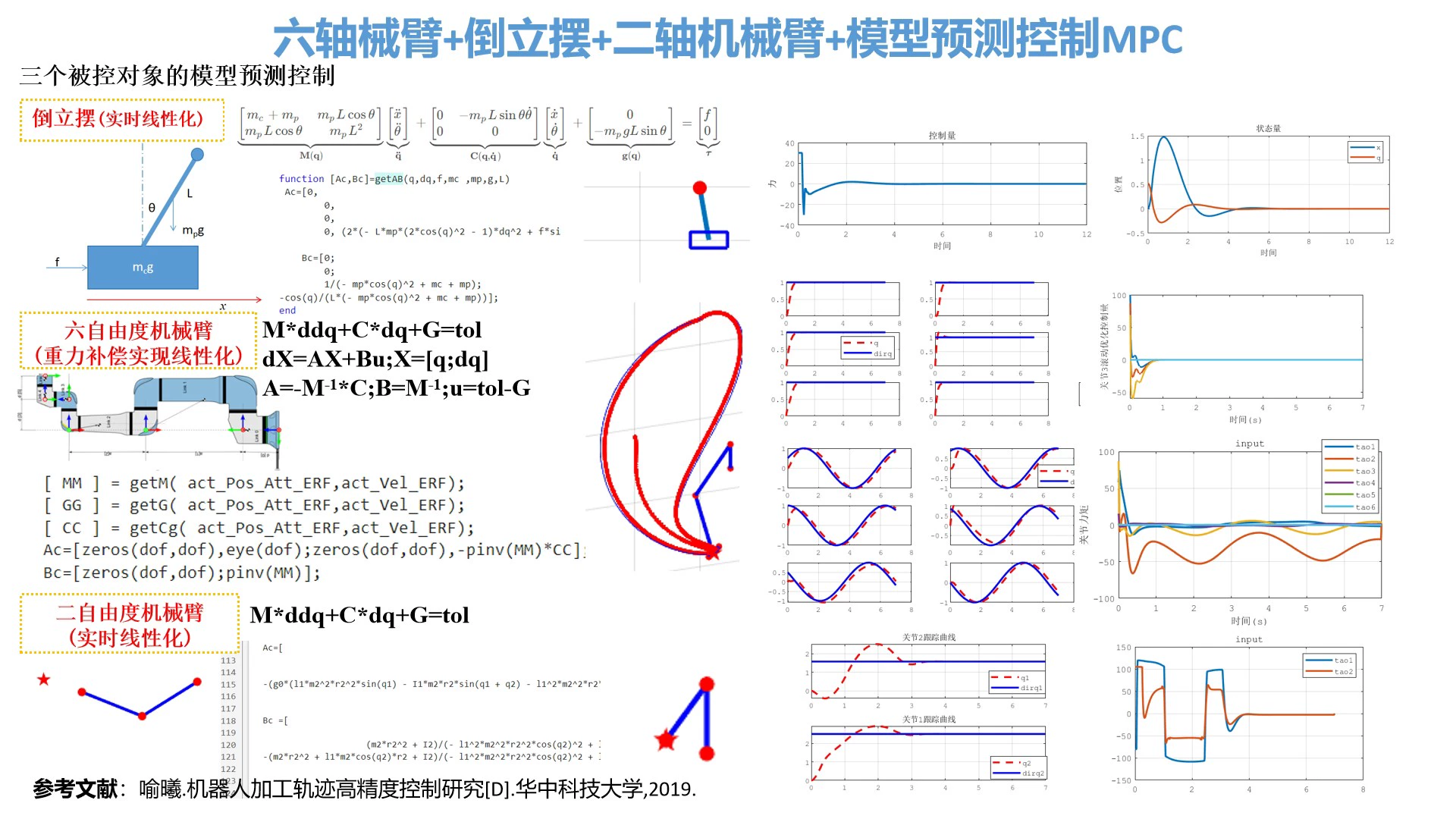
六自由度机械臂mpc模型预测控制+倒立摆+二自由度机械臂
一、系统整体架构
本套MATLAB代码构建了一套完整的二自由度机械臂控制与仿真系统,核心采用模型预测控制(MPC)算法实现关节角度的精准轨迹跟踪。系统涵盖机械臂动力学建模、正运动学求解、参考轨迹生成、MPC控制器设计及仿真结果可视化五大模块,通过模块化设计实现了从理论建模到实际仿真验证的全流程闭环控制。
二、核心模块功能解析
1. 动力学模型模块(RobDyn.m)
作为系统的物理核心模型,该模块基于拉格朗日方程建立二自由度机械臂的运动学关系,具体功能包括:
- 接收关节控制力矩(tao)和当前状态向量(X=[q1,q2,dq1,dq2])
- 计算机械臂惯性矩阵(M)、科里奥利-离心力矩阵(C)和重力矩阵(G)
- 通过动力学方程M·ddq + C·dq + G = tao求解角加速度
- 输出状态导数向量dX,为运动状态更新提供基础
物理参数通过ROB结构体传入,包括连杆质量(m1/m2)、长度(l1/l2)、质心位置(r1/r2)、转动惯量(I1/I2)及重力加速度等关键参数,确保模型与实际机械臂特性一致。
2. MPC控制器模块(RobDynMPC.m)
实现模型预测控制的核心逻辑,是系统的"大脑",主要功能包括:
- 状态空间模型构建:通过getmcg子函数获取当前状态下的M、C、G矩阵,建立连续时间状态空间模型并离散化
- 参考轨迹生成:调用getTraj函数生成未来N个时刻的期望状态序列
- 优化问题构建:以状态跟踪误差和控制能耗为目标,构建二次规划(QP)问题,包含Q/R权重矩阵配置
- 约束处理:设置控制力矩上下限(lb/ub),确保输出力矩在机械臂物理允许范围内
- 优化求解:使用quadprog求解QP问题,输出当前时刻的最优控制力矩
该模块通过实时线性化处理机械臂的非线性特性,采用滚动优化策略,仅执行优化序列的第一个控制量,实现动态轨迹跟踪。
3. 正运动学模块(fkRob.m)
实现关节空间到笛卡尔空间的坐标转换,功能包括:
- 接收关节角度(q1,q2)和机械臂结构参数
- 计算基座、关节1端点和末端执行器的笛卡尔坐标
- 输出位置矩阵P,为机械臂运动可视化提供坐标数据
通过正运动学计算,可直观观察机械臂末端的实际运动轨迹与期望轨迹的偏差,验证控制效果。
4. 轨迹生成模块(getTraj.m)
为MPC控制器提供优化所需的参考轨迹,功能特点:
- 基于当前状态和期望目标状态,采用线性插值方法
- 生成未来N个控制时域内的期望状态序列(q1/q2/dq1/dq2)
- 确保参考轨迹平滑过渡,避免剧烈变化导致的控制不稳定
5. 主控制模块(main.m)
系统的集成与调度中心,实现全流程仿真控制:
- 参数配置:机械臂物理参数、控制周期(dt=0.01s)、仿真时间(T=7s)、MPC控制时域(p_t=20)等
- 初始化设置:初始状态(q0=[0,0,0,0])、期望状态(qd=[π/2, 0.8π, 0, 0])
- 控制循环:采用四阶龙格-库塔法(RK4)更新系统状态,每步调用MPC控制器求解最优力矩
- 结果记录:存储所有时刻的状态数据(q)和控制力矩(u)
- 可视化输出:生成角度跟踪曲线、控制力矩曲线、MPC优化序列曲线及机械臂运动动画
6. 符号计算模块(testsym.m)
提供动力学模型的理论推导支持,功能包括:
- 基于符号变量推导机械臂动力学方程
- 计算状态矩阵A和输入矩阵B的解析表达式
- 生成getA.m和getB.m函数文件,用于控制器设计验证
三、关键技术特点
- 非线性系统线性化处理:通过实时计算雅可比矩阵将非线性动力学模型线性化,兼顾控制精度与计算效率
- 滚动优化机制:MPC控制器在每个控制周期重新优化未来N步的控制序列,仅执行当前步控制量,具有较强的抗干扰能力
- 约束处理能力:直接在优化过程中考虑控制力矩的物理约束,避免机械臂执行机构过载
- 多目标优化:通过Q/R权重矩阵平衡轨迹跟踪精度与控制能耗,可根据实际需求灵活调整
四、仿真结果说明
- 角度跟踪曲线:展示关节1和关节2的实际角度与期望角度的对比,验证系统的轨迹跟踪性能,理想状态下实际角度应快速收敛至期望角度且稳态误差小
- 控制力矩曲线:显示两个关节的实时控制力矩变化,初始阶段力矩较大以驱动关节快速响应,稳态时趋于稳定,且始终在约束范围内
- MPC优化序列:展示未来N个时刻的优化力矩序列,体现预测控制的前瞻性
- 运动动画:直观展示机械臂的运动过程,标记末端实际位置与期望位置,便于观察空间轨迹跟踪效果
五、使用与扩展建议
- 参数调整:通过修改Q/R权重矩阵可调节系统响应速度与控制平稳性;调整控制时域N可在计算复杂度与控制性能间取得平衡
- 物理参数适配:替换ROB结构体中的参数可适配不同规格的二自由度机械臂
- 功能扩展:可扩展轨迹生成模块以支持复杂曲线轨迹;增加扰动项可测试系统鲁棒性;结合硬件接口可实现实际机械臂控制
本系统为二自由度机械臂的模型预测控制研究提供了完整的仿真验证平台,既可用于教学演示,也可作为实际机械臂控制系统开发的基础框架。
六自由度机械臂mpc模型预测控制+倒立摆+二自由度机械臂

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 7
7 0
0- 0



 已为社区贡献56条内容
已为社区贡献56条内容

所有评论(0)