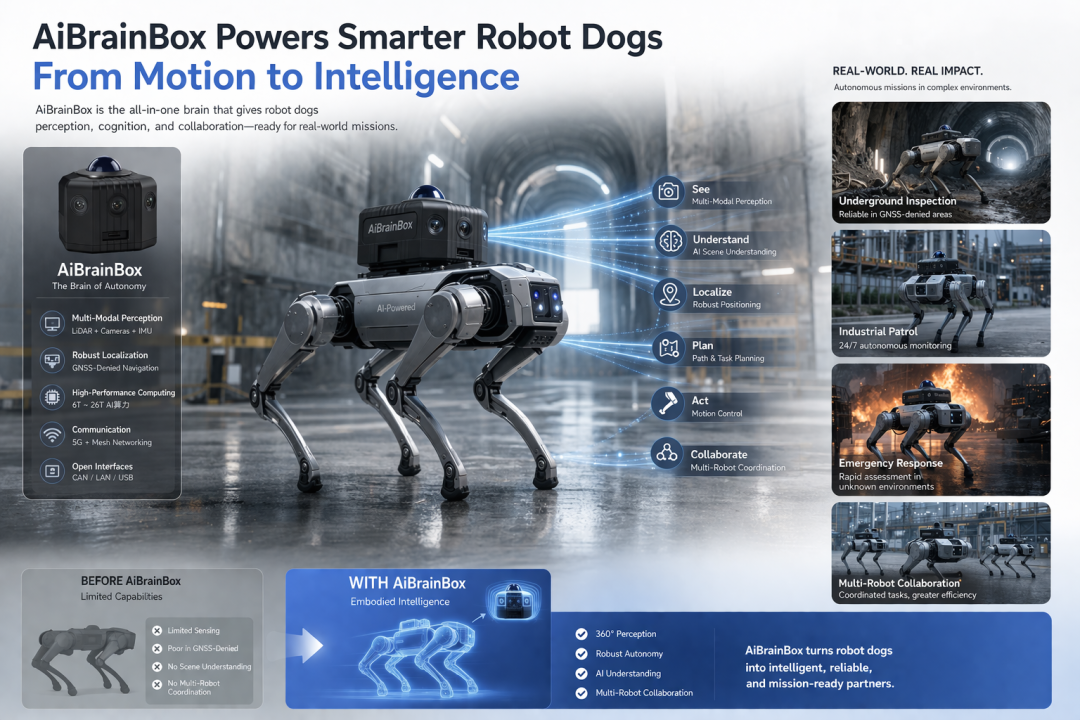
AiBrainBox-UGV无人系统核心感知与控制平台:面向矿山地下环境的空地协同无人系统及多模态融合定位关键技术
AiBrainBox-UGV无人系统核心感知与控制平台:面向矿山地下环境的空地协同无人系统及多模态融合定位关键技术
总体目标
本项目面向矿山及地下复杂环境GNSS信号缺失、感知困难、作业风险高等问题,研究空地协同无人系统架构,突破多模态融合定位、自主导航与多机协同作业关键技术,构建基于AiBrainBox的通·感·算·控一体化无人系统平台,实现复杂环境下高可靠巡检与应急作业能力。
核心技术路线
1️⃣ 多模态融合定位
-
LiDAR SLAM
-
VIO(视觉惯导)
-
UWB辅助定位
-
IMU融合
指标:
-
定位误差 ≤ 1%(航程)
-
GNSS拒止环境稳定运行 ≥ 30min
2️⃣ 空地协同系统
-
UAV(空中)+ UGV(地面)
-
分布式任务执行(行为树)
-
异步协同(延迟容忍)
关键点:
-
任务链调度
-
多机协同地图构建
3️⃣ 智能感知与安全识别
-
YOLO:人员/设备识别
-
CLIP:语义理解
-
危险识别:
-
塌方
-
积水
-
障碍物
-
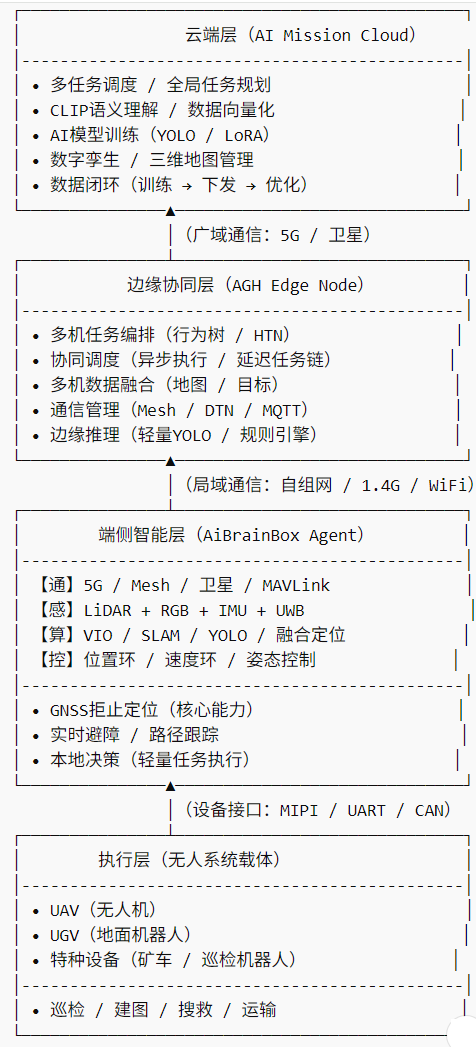
4️⃣ 通信与系统架构
-
自组网(Mesh / 1.4G)
-
边缘节点(AGH)
-
云端(AI Mission Cloud)
系统架构
云端(AI Mission Cloud)
↓
边缘(AGH协同节点)
↓
端侧(AiBrainBox)
↓
执行体(UAV / UGV)
任务1:地下环境多模态定位
-
SLAM + VIO + UWB融合
-
粉尘/弱光优化
任务2:空地协同机制
-
行为树任务调度
-
多机协同策略
任务3:智能感知与识别
-
YOLO模型训练(矿山场景)
-
数据集建设
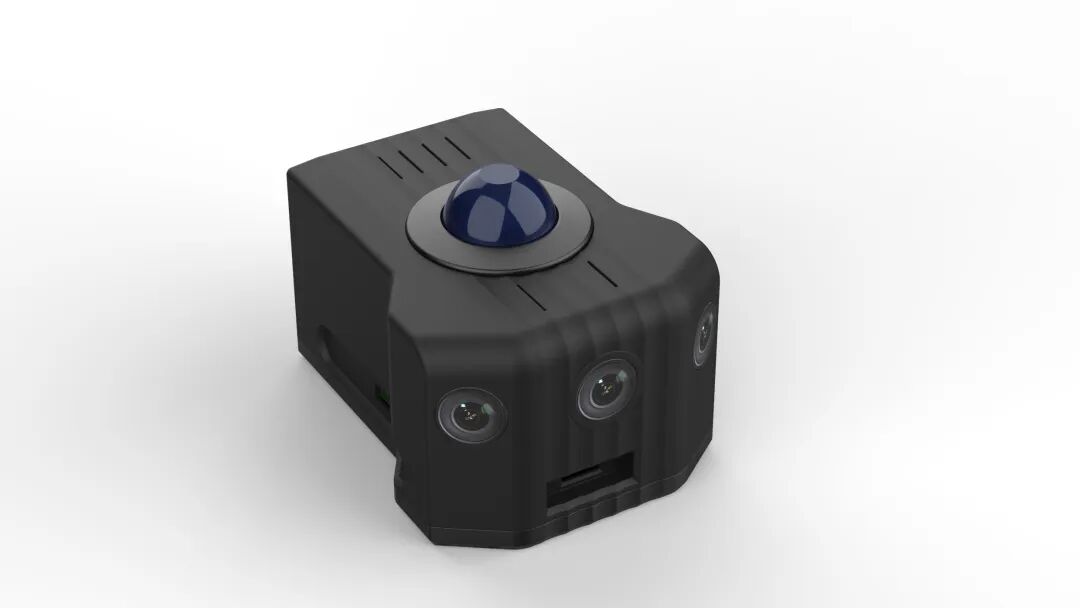
AiBrainBox系统-“无人系统核心感知与控制平台”
-
-
通·感·算·控一体
-
边缘智能
-
多模态融合
-
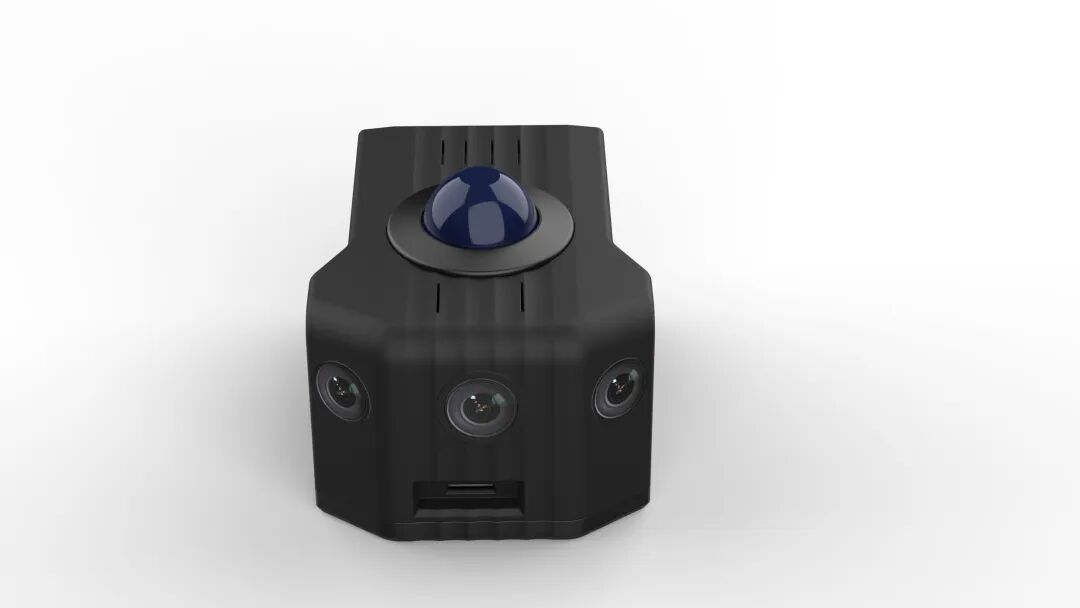
-
LiDAR / 相机 / UWB
-
UAV / UGV平台
AiBrainBox无人系统(矿山场景)总体架构图
终极系统架构(四层 + 三流)

【矿山环境适配模块】
• GNSS拒止环境适配
• 粉尘/弱光视觉增强
• UWB辅助定位
• 安全风险识别(塌方/人员)
• 通信中断容错(DTN)
端侧智能层(AiBrainBox Agent)
1️⃣ UAV 端
多目+LiDAR+IMU+UWB)
-
多模态融合定位(VIO+LiDAR+UWB)
-
YOLO目标识别
-
自主飞行控制(姿态/速度/位置环)
2️⃣ UGV 端
- 红外热成像(IR Camera)
-
夜间或热源目标识别
-
人员/设备检测
-
- 声音采集定位(麦克风阵列)
-
声源定位
-
环境异常检测(警报、机械故障等)
-
-
算法增强:
-
声音定位融合到行为决策
-
红外数据与视觉/LiDAR融合增强目标检测
-
-
控制:
-
地面自主导航 + 避障
-
与 UAV 协同(空地任务分配)
-
UAV 与 UGV 端侧配置对比
|
层级 |
UAV(空中) |
UGV(地面) |
|---|---|---|
|
AiBrainBox形态 |
多目相机(SC130/SC850/SC635)+ LiDAR + IMU + UWB |
多目相机 + LiDAR + IMU + UWB + 红外热成像相机 + 声音采集模块(麦克风阵列) |
|
核心功能 |
多模态融合定位、YOLO识别、路径自主控制 |
多模态融合定位(增加红外/声源)、YOLO识别、环境监测(温度/声音/热源) |
|
应用场景 |
高空巡检、地图构建、空中目标跟踪 |
地面巡检、灾害/安全监测、人员定位、声音异常检测 |
|
算法增强 |
VIO + SLAM + YOLO/CLIP |
VIO + SLAM + YOLO/CLIP + 声源定位算法 + 红外目标检测算法 |


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 7
7 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)