【端侧部署yolo系列】yolact部署至全志开发板
注:awnpu_model_zoo\docs里有详细的开发文档以及参考指南
本文是根据《NPU开发环境部署参考指南》,部署PC的ubuntu环境,使用Docker镜像环境为例进行说明。
如果想对部署流程进行更加详细的了解,可以参考《NPU_模型部署_开发指南》
重要说明:在awnpu_model_zoo内没有的模型,可参考awnpu_model_zoo\examples里面对应系列的模型进行修改部署,需要自行编写对应模型cpp前后处理代码以及修改相应的配置文件(如model_config.h、CMakeLists.txt)。如果遇到模型导出量化失败的情况,需要对模型进行相应的裁剪、或者采用不同的量化方式等。本文的yolact已经在板端经过了推理验证。
环境配置
关于参考之前部署yolox的文章【端侧部署yolo系列】yolox部署至全志开发板T736![]() https://blog.csdn.net/troyteng/article/details/155444386?spm=1011.2124.3001.6209
https://blog.csdn.net/troyteng/article/details/155444386?spm=1011.2124.3001.6209
下载镜像文件和AWNPU_Model_Zoo,创建自己的容器。
模型准备
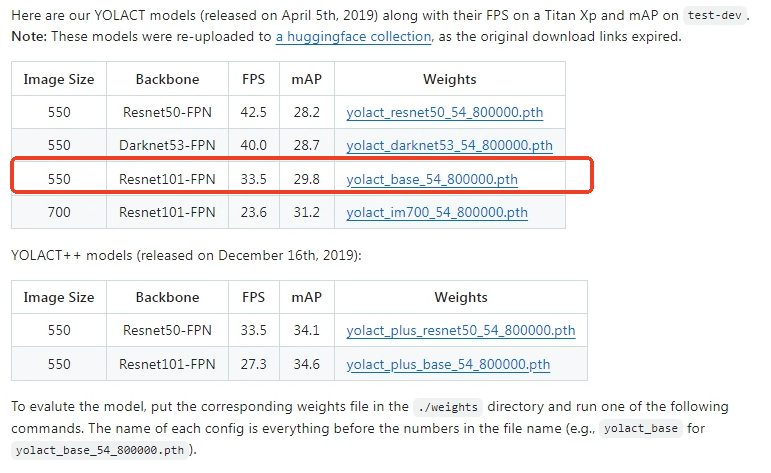
源码地址yolact,这里以yolact_base_54_800000.pth模型为例。
导出onnx模型
需要下载源码配置相应的环境,运行export_onnx.py导出onnx模型。
# 导出onnx模型
python export_onnx.py --trained_model=weights/yolact_base_54_800000.pth --config=yolact_base_configexport_onnx.py代码如下:
import torch
import torch.nn as nn
import argparse
import os
from yolact import Yolact
from data.config import cfg, set_cfg, Config
from collections import OrderedDict
def str2bool(v):
if v.lower() in ('yes', 'true', 't', 'y', '1'):
return True
elif v.lower() in ('no', 'false', 'f', 'n', '0'):
return False
else:
raise argparse.ArgumentTypeError('Boolean value expected.')
def parse_args():
parser = argparse.ArgumentParser(description='YOLACT ONNX Export')
parser.add_argument('--trained_model', default='weights/yolact_base_54_800000.pth', type=str,
help='Trained state_dict file path to open.')
parser.add_argument('--config', default='yolact_base_config', type=str,
help='The config object to use.')
parser.add_argument('--output', default=None, type=str,
help='Output ONNX file path. Default: same as trained_model with .onnx extension')
parser.add_argument('--batch_size', default=1, type=int,
help='Batch size for the model input')
parser.add_argument('--img_size', default=550, type=int,
help='Input image size (square)')
parser.add_argument('--opset_version', default=11, type=int,
help='ONNX opset version')
parser.add_argument('--simplify', default=True, type=str2bool,
help='Simplify the ONNX model using onnx-simplifier')
parser.add_argument('--dynamic_axes', default=False, type=str2bool,
help='Export with dynamic batch and image sizes')
return parser.parse_args()
class YolactONNXWrapper(nn.Module):
"""
Wrapper for YOLACT to make it ONNX-exportable.
This wraps the model to return only the essential outputs for inference.
"""
def __init__(self, yolact_model):
super().__init__()
self.model = yolact_model
# Disable the Detect layer for ONNX export (it has NMS which is hard to export)
# We'll export the raw predictions and do NMS separately
self.model.detect = None
def forward(self, x):
"""
Forward pass that returns raw predictions suitable for ONNX export.
Returns: loc, conf, mask, proto (if applicable)
"""
# Set image size for priors calculation
_, _, img_h, img_w = x.size()
cfg._tmp_img_h = img_h
cfg._tmp_img_w = img_w
# Backbone
outs = self.model.backbone(x)
# FPN
if cfg.fpn is not None:
outs = [outs[i] for i in cfg.backbone.selected_layers]
outs = self.model.fpn(outs)
# ProtoNet
proto_out = None
if cfg.mask_type == 1 and cfg.eval_mask_branch: # mask_type.lincomb == 1
proto_x = x if self.model.proto_src is None else outs[self.model.proto_src]
if self.model.num_grids > 0:
grids = self.model.grid.repeat(proto_x.size(0), 1, 1, 1)
proto_x = torch.cat([proto_x, grids], dim=1)
proto_out = self.model.proto_net(proto_x)
proto_out = cfg.mask_proto_prototype_activation(proto_out)
proto_out = proto_out.permute(0, 2, 3, 1).contiguous()
if cfg.mask_proto_bias:
bias_shape = [x for x in proto_out.size()]
bias_shape[-1] = 1
proto_out = torch.cat([proto_out, torch.ones(*bias_shape, device=proto_out.device)], -1)
# Prediction heads
pred_outs = {'loc': [], 'conf': [], 'mask': [], 'priors': []}
for idx, pred_layer in zip(self.model.selected_layers, self.model.prediction_layers):
pred_x = outs[idx]
if cfg.mask_type == 1 and cfg.mask_proto_prototypes_as_features: # lincomb
proto_downsampled = F.interpolate(proto_out.permute(0, 3, 1, 2),
size=outs[idx].size()[2:],
mode='bilinear',
align_corners=False)
pred_x = torch.cat([pred_x, proto_downsampled], dim=1)
p = pred_layer(pred_x)
for k, v in p.items():
if k in pred_outs:
pred_outs[k].append(v)
# Concatenate predictions from all layers
for k, v in pred_outs.items():
if len(v) > 0:
pred_outs[k] = torch.cat(v, -2)
# Apply activations
loc = pred_outs['loc']
conf = pred_outs['conf']
mask = pred_outs['mask']
# Apply softmax to conf
conf = torch.softmax(conf, dim=-1)
# Apply mask activation
if cfg.mask_type == 1: # lincomb
mask = cfg.mask_proto_coeff_activation(mask)
if proto_out is not None:
return loc, conf, mask, proto_out
else:
return loc, conf, mask
def export_to_onnx(args):
# Set configuration
if args.config is not None:
set_cfg(args.config)
print(f"Using config: {args.config}")
print(f"Number of classes: {cfg.num_classes}")
print(f"Input image size: {args.img_size}")
# Create model
print("Creating model...")
net = Yolact()
# Load weights
print(f"Loading weights from: {args.trained_model}")
if os.path.exists(args.trained_model):
net.load_weights(args.trained_model)
print("Weights loaded successfully!")
else:
print(f"Warning: Weight file not found at {args.trained_model}")
print("Exporting with random weights...")
net.eval()
# Wrap model for ONNX export
wrapped_model = YolactONNXWrapper(net)
wrapped_model.eval()
# Create dummy input
dummy_input = torch.randn(args.batch_size, 3, args.img_size, args.img_size)
# Determine output path
if args.output is None:
output_path = args.trained_model.replace('.pth', '.onnx')
else:
output_path = args.output
print(f"Exporting to: {output_path}")
# Define input/output names
input_names = ['input']
output_names = ['loc', 'conf', 'mask']
# Check if proto output exists
with torch.no_grad():
test_output = wrapped_model(dummy_input)
if len(test_output) == 4:
output_names.append('proto')
print("Model includes proto output for mask generation")
# Define dynamic axes
dynamic_axes = None
if args.dynamic_axes:
dynamic_axes = {
'input': {0: 'batch_size', 2: 'height', 3: 'width'},
'loc': {0: 'batch_size'},
'conf': {0: 'batch_size'},
'mask': {0: 'batch_size'},
}
if 'proto' in output_names:
dynamic_axes['proto'] = {0: 'batch_size'}
print("Using dynamic axes for batch and image sizes")
# Export to ONNX
try:
torch.onnx.export(
wrapped_model,
dummy_input,
output_path,
input_names=input_names,
output_names=output_names,
dynamic_axes=dynamic_axes,
opset_version=args.opset_version,
do_constant_folding=True,
verbose=False
)
print(f"ONNX model exported successfully to: {output_path}")
# Verify the model
try:
import onnx
onnx_model = onnx.load(output_path)
onnx.checker.check_model(onnx_model)
print("ONNX model validation passed!")
# Print model info
print("\nModel inputs:")
for input in onnx_model.graph.input:
print(f" {input.name}: {[dim.dim_value if dim.dim_value else dim.dim_param for dim in input.type.tensor_type.shape.dim]}")
print("\nModel outputs:")
for output in onnx_model.graph.output:
print(f" {output.name}: {[dim.dim_value if dim.dim_value else dim.dim_param for dim in output.type.tensor_type.shape.dim]}")
except ImportError:
print("onnx package not installed, skipping validation")
except Exception as e:
print(f"ONNX validation warning: {e}")
# Simplify model if requested
if args.simplify:
try:
import onnxsim
print("\nSimplifying ONNX model...")
onnx_model = onnx.load(output_path)
simplified_model, check = onnxsim.simplify(onnx_model)
if check:
onnx.save(simplified_model, output_path)
print("Model simplified successfully!")
else:
print("Model simplification check failed, keeping original model")
except ImportError:
print("onnx-simplifier not installed, skipping simplification")
print("Install with: pip install onnx-simplifier")
except Exception as e:
print(f"Simplification error: {e}")
# Test inference
try:
import onnxruntime as ort
print("\nTesting ONNX inference...")
ort_session = ort.InferenceSession(output_path)
# Run inference
onnx_input = dummy_input.numpy()
ort_inputs = {ort_session.get_inputs()[0].name: onnx_input}
ort_outputs = ort_session.run(None, ort_inputs)
print("ONNX inference test passed!")
for i, name in enumerate(output_names):
print(f" {name} shape: {ort_outputs[i].shape}")
except ImportError:
print("onnxruntime not installed, skipping inference test")
print("Install with: pip install onnxruntime")
except Exception as e:
print(f"Inference test error: {e}")
print(f"\nExport complete! Model saved to: {output_path}")
print("\nNote: This ONNX model outputs raw predictions (loc, conf, mask, proto).")
print("Post-processing (NMS, mask assembly) needs to be done separately.")
except Exception as e:
print(f"Export failed: {e}")
import traceback
traceback.print_exc()
def main():
args = parse_args()
export_to_onnx(args)
if __name__ == '__main__':
main()进入容器完成后续的操作。
模型简化
进入下载好的模型库文件awnpu_model_zoo/eamples/yolact/
# 运行onnx_extract.py对模型进行裁剪,生成yolact_base_54_800000_rt.onnx
python3 onnx_extract.py
# 运行推理
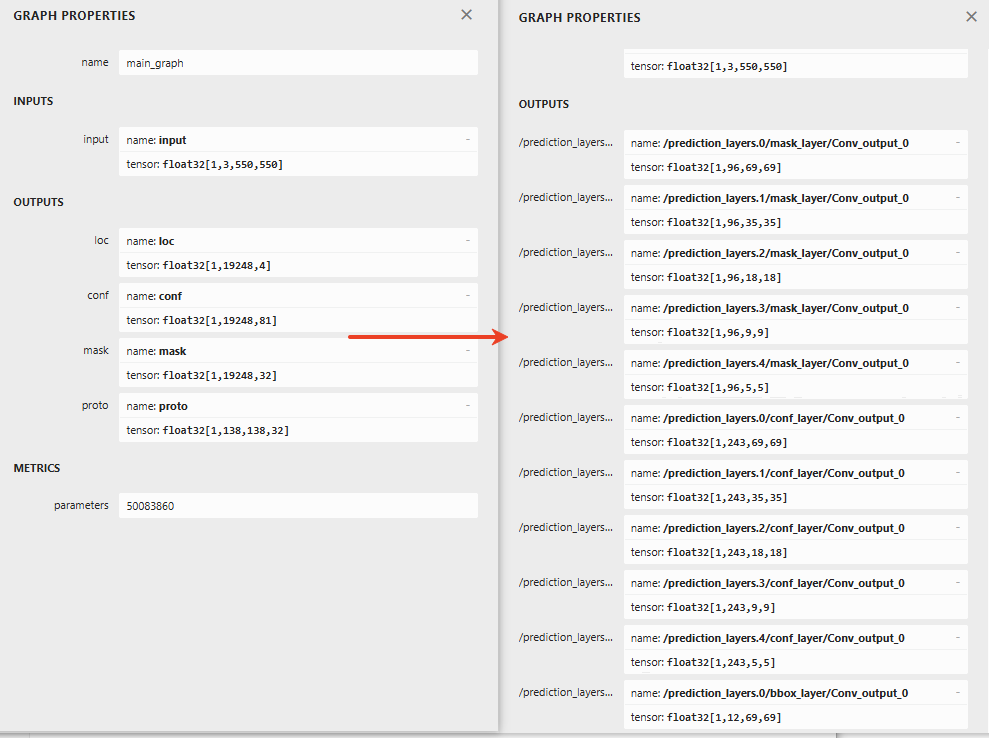
python3 inference_onnx.py --model=../yolact_base_54_800000_rt.onnx --image=../../model/bus.jpgyolact网络的后处理部分8bit量化会产生较大的精度损失,通过onnx_extract.py对模型剪枝,修改输出结构,同时将后处理结构移至外部使用cpu进行相应的处理。模型输出差异如下,左边是官方模型,右边是修改后的模型。这里有直接裁剪好的官方模型
模型配置
修改config_yml.py文件的相关参数配置:
# "database"
DATASET = '../../dataset/coco_12/dataset.txt'
DATASET_TYPE = "TEXT"
# mean, scale
MEAN = [123.68, 116.78, 103.94]
SCALE = [0.017123, 0.017507, 0.0174276]
# reverse_channel: True bgr, False rgb
REVERSE_CHANNEL = False
# add_preproc_node, True or False
ADD_PREPROC_NODE = True
# "preproc_type"
PREPROC_TYPE = "IMAGE_RGB"
# add_postproc_node, quant output -> float32 output
ADD_POSTPROC_NODE = True模型前后处理
后处理说明:yolact的特征图和先验框(锚框)分别有5个
feature_maps = [(69, 69), (35, 35), (18, 18), (9, 9), (5, 5)]
scales = [[24], [48], [96], [192], [384]]由于源码有一个bug,导致所有的先验框为正方形h = w;
在yolact.py的242行,作者注释:
# This is for backward compatability with a bug where I made everything square by accident
if cfg.backbone.use_square_anchors:
源码中还有重打分 (Rescoring) 机制以及Fast NMS(是 YOLACT 使用的改进版本,通过矩阵操作加速 ),本文采用的都是标准的nms。
配置文件model_config.h
配置文件model_config.h可以直接复制其他yolo官方系列的模型(yolov5、yolov8、yolo11、yolo26)。
前处理yolact_pre.cpp
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
#include <stdio.h>
#include <stdint.h>
#include <string.h>
#include <math.h>
#include "model_config.h"
void get_input_data_yolact(const char* image_file, unsigned char* input_data, int input_rows, int input_cols)
{
cv::Mat sample = cv::imread(image_file, 1);
if (sample.empty()) {
fprintf(stderr, "cv::imread %s failed\n", image_file);
return;
}
// Convert BGR to RGB
cv::Mat img;
cv::cvtColor(sample, img, cv::COLOR_BGR2RGB);
// Resize to input size (550x550), no letterbox padding for YOLACT
cv::resize(img, img, cv::Size(input_cols, input_rows));
// Copy to output buffer (HWC format, uint8)
memcpy(input_data, img.data, input_rows * input_cols * 3 * sizeof(uint8_t));
}
uint8_t *yolact_preprocess(const char* imagepath, unsigned int *data_size)
{
int img_c = 3;
// YOLACT input size: 550x550
int input_rows = LETTERBOX_ROWS;
int input_cols = LETTERBOX_COLS;
int img_size = input_rows * input_cols * img_c;
*data_size = img_size * sizeof(uint8_t);
uint8_t *tensorData = NULL;
tensorData = (uint8_t *)malloc(1 * img_size * sizeof(uint8_t));
get_input_data_yolact(imagepath, tensorData, input_rows, input_cols);
return tensorData;
}
int yolact_preprocess_no_copy(const char* imagepath, void* buff_ptr, unsigned int buff_size)
{
int img_c = 3;
// YOLACT input size: 550x550
int input_rows = LETTERBOX_ROWS;
int input_cols = LETTERBOX_COLS;
int img_size = input_rows * input_cols * img_c;
unsigned int data_size = img_size * sizeof(uint8_t);
if (data_size > buff_size) {
printf("data size > buff size, please check code. \n");
return -1;
}
get_input_data_yolact(imagepath, (unsigned char*)buff_ptr, input_rows, input_cols);
return 0;
}
后处理yolact_post.cpp
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
#include <stdio.h>
#include <vector>
#include <cmath>
#include <chrono>
#include <algorithm>
#include <cstring>
#include "model_config.h"
using namespace std;
// Forward declaration
void draw_yolact_detections(const cv::Mat& bgr, const std::vector<struct YOLACTDet>& dets);
// YOLACT detection result structure
struct YOLACTDet
{
cv::Rect_<float> rect;
int label;
float prob;
std::vector<float> mask_coeffs;
cv::Mat mask;
};
// Prior box parameters
static const int PRIOR_FEATURE_MAPS_H[5] = {69, 35, 18, 9, 5};
static const int PRIOR_FEATURE_MAPS_W[5] = {69, 35, 18, 9, 5};
static const int PRIOR_SCALES[5] = {24, 48, 96, 192, 384};
static const float PRIOR_ASPECT_RATIOS[3] = {1.0f, 0.7071067811865476f, 1.4142135623730951f}; // sqrt(0.5), sqrt(2)
static const float PRIOR_VARIANCES[2] = {0.1f, 0.2f};
// Global prior boxes cache
static std::vector<float> g_prior_boxes;
static bool g_priors_generated = false;
static inline float sigmoid(float x)
{
return static_cast<float>(1.f / (1.f + exp(-x)));
}
static inline float tanh_func(float x)
{
return static_cast<float>(tanh(x));
}
// Generate prior boxes (called once)
static void generate_priors()
{
if (g_priors_generated) return;
g_prior_boxes.clear();
int input_size = 550;
for (int k = 0; k < 5; k++) {
int conv_h = PRIOR_FEATURE_MAPS_H[k];
int conv_w = PRIOR_FEATURE_MAPS_W[k];
int scale = PRIOR_SCALES[k];
for (int j = 0; j < conv_h; j++) {
for (int i = 0; i < conv_w; i++) {
float cx = (i + 0.5f) / conv_w;
float cy = (j + 0.5f) / conv_h;
for (int ar_idx = 0; ar_idx < 3; ar_idx++) {
float ar = PRIOR_ASPECT_RATIOS[ar_idx];
float prior_w = scale * ar / input_size;
float prior_h = scale / ar / input_size;
// Use square anchors (as in original code)
prior_h = prior_w;
g_prior_boxes.push_back(cx);
g_prior_boxes.push_back(cy);
g_prior_boxes.push_back(prior_w);
g_prior_boxes.push_back(prior_h);
}
}
}
}
g_priors_generated = true;
}
// Decode box predictions
static void decode_boxes(const float* loc, float* boxes, int num_priors)
{
for (int i = 0; i < num_priors; i++) {
int p_idx = i * 4;
int l_idx = i * 4;
float prior_cx = g_prior_boxes[p_idx + 0];
float prior_cy = g_prior_boxes[p_idx + 1];
float prior_w = g_prior_boxes[p_idx + 2];
float prior_h = g_prior_boxes[p_idx + 3];
float loc_0 = loc[l_idx + 0];
float loc_1 = loc[l_idx + 1];
float loc_2 = loc[l_idx + 2];
float loc_3 = loc[l_idx + 3];
float box_cx = prior_cx + loc_0 * PRIOR_VARIANCES[0] * prior_w;
float box_cy = prior_cy + loc_1 * PRIOR_VARIANCES[0] * prior_h;
float box_w = prior_w * exp(loc_2 * PRIOR_VARIANCES[1]);
float box_h = prior_h * exp(loc_3 * PRIOR_VARIANCES[1]);
// Convert to [x1, y1, x2, y2] format
boxes[i * 4 + 0] = box_cx - box_w / 2.0f;
boxes[i * 4 + 1] = box_cy - box_h / 2.0f;
boxes[i * 4 + 2] = box_cx + box_w / 2.0f;
boxes[i * 4 + 3] = box_cy + box_h / 2.0f;
}
}
// Softmax function for confidence scores
static void softmax(const float* input, float* output, int n)
{
float max_val = input[0];
for (int i = 1; i < n; i++) {
if (input[i] > max_val) max_val = input[i];
}
float sum = 0.0f;
for (int i = 0; i < n; i++) {
output[i] = exp(input[i] - max_val);
sum += output[i];
}
for (int i = 0; i < n; i++) {
output[i] /= sum;
}
}
static inline float intersection_area(const YOLACTDet& a, const YOLACTDet& b)
{
cv::Rect_<float> inter = a.rect & b.rect;
return inter.area();
}
static void qsort_descent_inplace(std::vector<YOLACTDet>& objects, int left, int right)
{
int i = left;
int j = right;
float p = objects[(left + right) / 2].prob;
while (i <= j)
{
while (objects[i].prob > p)
i++;
while (objects[j].prob < p)
j--;
if (i <= j)
{
// swap
std::swap(objects[i], objects[j]);
i++;
j--;
}
}
#pragma omp parallel sections
{
#pragma omp section
{
if (left < j) qsort_descent_inplace(objects, left, j);
}
#pragma omp section
{
if (i < right) qsort_descent_inplace(objects, i, right);
}
}
}
static void qsort_descent_inplace(std::vector<YOLACTDet>& objects)
{
if (objects.empty())
return;
qsort_descent_inplace(objects, 0, objects.size() - 1);
}
static void nms_sorted_bboxes(const std::vector<YOLACTDet>& objects, std::vector<int>& picked, float nms_threshold, bool agnostic = false)
{
picked.clear();
const int n = objects.size();
std::vector<float> areas(n);
for (int i = 0; i < n; i++)
{
areas[i] = objects[i].rect.area();
}
for (int i = 0; i < n; i++)
{
const YOLACTDet& a = objects[i];
int keep = 1;
for (int j = 0; j < (int)picked.size(); j++)
{
const YOLACTDet& b = objects[picked[j]];
if (!agnostic && a.label != b.label)
continue;
// intersection over union
float inter_area = intersection_area(a, b);
float union_area = areas[i] + areas[picked[j]] - inter_area;
// float IoU = inter_area / union_area
if (inter_area / union_area > nms_threshold)
keep = 0;
}
if (keep)
picked.push_back(i);
}
}
// Assemble mask from prototypes and coefficients
static cv::Mat assemble_mask(const std::vector<float>& mask_coeffs, const float* proto_data, int proto_h, int proto_w, int mask_dim, const cv::Rect_<float>& box)
{
// mask = sigmoid(proto @ mask_coeffs.T)
cv::Mat mask(proto_h, proto_w, CV_32F);
for (int y = 0; y < proto_h; y++) {
for (int x = 0; x < proto_w; x++) {
float val = 0.0f;
for (int c = 0; c < mask_dim; c++) {
val += proto_data[(y * proto_w + x) * mask_dim + c] * mask_coeffs[c];
}
mask.at<float>(y, x) = sigmoid(val);
}
}
// Crop to box region
int x1 = std::max(0, (int)(box.x * proto_w));
int y1 = std::max(0, (int)(box.y * proto_h));
int x2 = std::min(proto_w, (int)((box.x + box.width) * proto_w));
int y2 = std::min(proto_h, (int)((box.y + box.height) * proto_h));
cv::Mat crop_mask = cv::Mat::zeros(proto_h, proto_w, CV_32F);
if (x2 > x1 && y2 > y1) {
cv::Rect roi(x1, y1, x2 - x1, y2 - y1);
cv::Mat(crop_mask, roi) = 1.0f;
mask = mask.mul(crop_mask);
}
return mask;
}
// Main post-processing function
int yolact_postprocess(const char* imagepath, float** output, int output_cnt)
{
std::chrono::steady_clock::time_point Tbegin, Tend;
Tbegin = std::chrono::steady_clock::now();
cv::Mat orig_img = cv::imread(imagepath, 1);
if (orig_img.empty()) {
fprintf(stderr, "cv::imread %s failed\n", imagepath);
return -1;
}
int orig_h = orig_img.rows;
int orig_w = orig_img.cols;
// Generate priors (first time only)
generate_priors();
// Model output structure (16 outputs):
// outputs[0-4]: mask coefficients [1, 96, H, W] (5 layers)
// outputs[5-9]: confidence scores [1, 243, H, W] (5 layers)
// outputs[10-14]: bbox predictions [1, 12, H, W] (5 layers)
// outputs[15]: mask prototypes [1, 138, 138, 32]
if (output_cnt < 16) {
fprintf(stderr, "Error: expected 16 outputs, got %d\n", output_cnt);
return -1;
}
// Process each feature map layer
std::vector<float> all_locs;
std::vector<float> all_confs;
std::vector<float> all_masks;
for (int layer = 0; layer < 5; layer++) {
int h = PRIOR_FEATURE_MAPS_H[layer];
int w = PRIOR_FEATURE_MAPS_W[layer];
int num_anchors = h * w * 3;
// Get output pointers
float* mask_data = output[layer];
float* conf_data = output[5 + layer];
float* bbox_data = output[10 + layer];
// Process bbox (shape: [1, 12, h, w] -> 12 = 3*4)
// Transpose from NCHW to NHWC
for (int y = 0; y < h; y++) {
for (int x = 0; x < w; x++) {
for (int a = 0; a < 3; a++) {
for (int c = 0; c < 4; c++) {
// NCHW: [0, a*4+c, y, x] -> NHWC
int nchw_idx = ((a * 4 + c) * h + y) * w + x;
all_locs.push_back(bbox_data[nchw_idx]);
}
}
}
}
// Process confidence (shape: [1, 243, h, w] -> 243 = 3*81)
for (int y = 0; y < h; y++) {
for (int x = 0; x < w; x++) {
for (int a = 0; a < 3; a++) {
float conf_raw[81];
float conf_softmax[81];
// Read 81 class scores
for (int c = 0; c < 81; c++) {
int nchw_idx = ((a * 81 + c) * h + y) * w + x;
conf_raw[c] = conf_data[nchw_idx];
}
// Apply softmax
softmax(conf_raw, conf_softmax, 81);
// Store (skip background class 0)
for (int c = 1; c < 81; c++) {
all_confs.push_back(conf_softmax[c]);
}
}
}
}
// Process mask coefficients (shape: [1, 96, h, w] -> 96 = 3*32)
for (int y = 0; y < h; y++) {
for (int x = 0; x < w; x++) {
for (int a = 0; a < 3; a++) {
for (int c = 0; c < 32; c++) {
int nchw_idx = ((a * 32 + c) * h + y) * w + x;
// Apply tanh activation
all_masks.push_back(tanh_func(mask_data[nchw_idx]));
}
}
}
}
}
// Decode boxes
int num_priors = all_locs.size() / 4;
std::vector<float> boxes(num_priors * 4);
decode_boxes(all_locs.data(), boxes.data(), num_priors);
// Filter by confidence threshold
float conf_thresh = CONF_THRESH; // Use fixed threshold
std::vector<YOLACTDet> detections;
for (int i = 0; i < num_priors; i++) {
// Find max class score
float max_score = 0.0f;
int max_class = 0;
for (int c = 0; c < 80; c++) {
float score = all_confs[i * 80 + c];
if (score > max_score) {
max_score = score;
max_class = c;
}
}
if (max_score > conf_thresh) {
YOLACTDet det;
det.rect.x = boxes[i * 4 + 0];
det.rect.y = boxes[i * 4 + 1];
det.rect.width = boxes[i * 4 + 2] - boxes[i * 4 + 0];
det.rect.height = boxes[i * 4 + 3] - boxes[i * 4 + 1];
det.label = max_class;
det.prob = max_score;
// Store mask coefficients
det.mask_coeffs.resize(32);
for (int c = 0; c < 32; c++) {
det.mask_coeffs[c] = all_masks[i * 32 + c];
}
detections.push_back(det);
}
}
// Use yolov5 style NMS
qsort_descent_inplace(detections);
std::vector<int> picked;
nms_sorted_bboxes(detections, picked, NMS_THRESHOLD);
int count = picked.size();
std::vector<YOLACTDet> filtered_dets(count);
for (int i = 0; i < count; i++)
{
filtered_dets[i] = detections[picked[i]];
}
// Keep top MAX_DETECTIONS
int max_dets = MAX_DETECTIONS;
if ((int)filtered_dets.size() > max_dets) {
filtered_dets.resize(max_dets);
}
// Get proto data
float* proto_data = output[15];
int proto_h = PROTO_H;
int proto_w = PROTO_W;
int mask_dim = MASK_DIM;
// Assemble masks
for (auto& det : filtered_dets) {
det.mask = assemble_mask(det.mask_coeffs, proto_data, proto_h, proto_w, mask_dim, det.rect);
// Resize mask to original image size
cv::resize(det.mask, det.mask, cv::Size(orig_w, orig_h));
// Apply threshold
det.mask = (det.mask > MASK_THRESHOLD);
// Scale box to original image
det.rect.x *= orig_w;
det.rect.y *= orig_h;
det.rect.width *= orig_w;
det.rect.height *= orig_h;
// Clip to image bounds
det.rect.x = std::max(0.0f, std::min(det.rect.x, (float)orig_w - 1));
det.rect.y = std::max(0.0f, std::min(det.rect.y, (float)orig_h - 1));
det.rect.width = std::min(det.rect.width, orig_w - det.rect.x);
det.rect.height = std::min(det.rect.height, orig_h - det.rect.y);
}
Tend = std::chrono::steady_clock::now();
float f = std::chrono::duration_cast<std::chrono::milliseconds>(Tend - Tbegin).count();
std::cout << "post process time : " << f << " ms" << std::endl;
// Draw results
draw_yolact_detections(orig_img, filtered_dets);
return 0;
}
// Draw detection results with masks
void draw_yolact_detections(const cv::Mat& bgr, const std::vector<YOLACTDet>& dets)
{
cv::Mat result = bgr.clone();
fprintf(stderr, "detection num: %zu\n", dets.size());
for (size_t i = 0; i < dets.size(); i++) {
const YOLACTDet& det = dets[i];
int color_idx = (i * 5) % 19;
cv::Scalar color(g_colors[color_idx][0], g_colors[color_idx][1], g_colors[color_idx][2]);
// Draw mask overlay
cv::Mat mask_colored = cv::Mat::zeros(result.size(), result.type());
mask_colored.setTo(color, det.mask);
cv::addWeighted(result, 1.0, mask_colored, 0.5, 0, result);
// Draw bounding box
cv::rectangle(result, det.rect, color, 1);
// Draw label
char text[256];
sprintf(text, "%s %.1f%%", g_classes_name[det.label].c_str(), det.prob * 100);
int baseline = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseline);
int x = det.rect.x;
int y = det.rect.y - label_size.height - baseline;
if (y < 0) y = 0;
if (x + label_size.width > result.cols) x = result.cols - label_size.width;
cv::rectangle(result, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseline)),
cv::Scalar(255, 255, 255), -1);
cv::putText(result, text, cv::Point(x, y + label_size.height), cv::FONT_HERSHEY_SIMPLEX, 0.5,
cv::Scalar(0, 0, 0), 1);
fprintf(stderr, "%2d: %3.0f%%, [%4.0f, %4.0f, %4.0f, %4.0f], %s\n",
(int)i + 1, det.prob * 100,
det.rect.x, det.rect.y, det.rect.x + det.rect.width, det.rect.y + det.rect.height,
g_classes_name[det.label].c_str());
}
cv::imwrite("output_yolact.png", result);
}
主函数main()
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/time.h>
#include "npulib.h"
#include "model_config.h"
/*-------------------------------------------
Macros and Variables
-------------------------------------------*/
extern uint8_t *yolact_preprocess(const char* imagepath, unsigned int *data_size);
extern int yolact_preprocess_no_copy(const char* imagepath, void* buff_ptr, unsigned int buff_size);
extern int yolact_postprocess(const char *imagepath, float **output, int output_cnt);
const char *usage =
"model_demo -nb modle_path -i input_path -l loop_run_count -m malloc_mbyte \n"
"-nb modle_path: the NBG file path.\n"
"-i input_path: the input file path.\n"
"-l loop_run_count: the number of loop run network.\n"
"-m malloc_mbyte: npu_unit init memory Mbytes.\n"
"-h : help\n"
"example: model_demo -nb model.nb -i input.jpg -l 10 -m 20 \n";
enum time_idx_e {
NPU_INIT = 0,
NETWORK_CREATE,
NETWORK_PREPARE,
NETWORK_PREPROCESS,
NETWORK_RUN,
NETWORK_LOOP,
TIME_IDX_MAX = 9
};
#if defined(__linux__)
#define TIME_SLOTS 10
static uint64_t time_begin[TIME_SLOTS];
static uint64_t time_end[TIME_SLOTS];
static uint64_t GetTime(void)
{
struct timeval time;
gettimeofday(&time, NULL);
return (uint64_t)(time.tv_usec + time.tv_sec * 1000000);
}
static void TimeBegin(int id)
{
time_begin[id] = GetTime();
}
static void TimeEnd(int id)
{
time_end[id] = GetTime();
}
static uint64_t TimeGet(int id)
{
return time_end[id] - time_begin[id];
}
#endif
int main(int argc, char** argv)
{
int status = 0;
int i = 0, k = 0, j = 0;
unsigned int count = 0;
long long total_infer_time = 0;
char *model_file = nullptr;
char *input_file = nullptr;
unsigned int loop_count = 1;
unsigned int malloc_mbyte = 10;
if (argc < 2) {
printf("%s\n", usage);
return -1;
}
for (i = 0; i< argc; i++) {
if (!strcmp(argv[i], "-nb")) {
model_file = argv[++i];
}
else if (!strcmp(argv[i], "-i")) {
input_file = argv[++i];
}
else if (!strcmp(argv[i], "-l")) {
loop_count = atoi(argv[++i]);
}
else if (!strcmp(argv[i], "-m")) {
malloc_mbyte = atoi(argv[++i]);
}
else if (!strcmp(argv[i], "-h")) {
printf("%s\n", usage);
return 0;
}
}
printf("model_file=%s, input=%s, loop_count=%d, malloc_mbyte=%d \n", model_file, input_file, loop_count, malloc_mbyte);
if (model_file == nullptr)
return -1;
/* NPU init*/
NpuUint npu_uint;
int ret = npu_uint.npu_init();
if (ret != 0) {
return -1;
}
NetworkItem yolact;
unsigned int network_id = 0;
status = yolact.network_create(model_file, network_id);
if (status != 0) {
printf("network %d create failed.\n", network_id);
return -1;
}
status = yolact.network_prepare();
if (status != 0) {
printf("network prepare fail, status=%d\n", status);
return -1;
}
TimeBegin(NETWORK_PREPROCESS);
#if 0
// input jpg file
void *file_data = nullptr;
unsigned int file_data_size = 0;
file_data = (void *)yolact_preprocess(input_file, &file_data_size);
status = yolact.network_load_input_buffer(file_data, file_data_size);
if (status != 0) {
printf("network load input file fail, status=%d\n", status);
}
if (file_data != nullptr) {
free(file_data);
file_data = nullptr;
}
#else
// input jpg file, no copy way
void *input_buffer_ptr = nullptr;
unsigned int input_buffer_size = 0;
yolact.get_network_input_buff_info(0, &input_buffer_ptr, &input_buffer_size);
printf("buffer ptr: %p, buffer size: %d \n", input_buffer_ptr, input_buffer_size);
yolact_preprocess_no_copy(input_file, input_buffer_ptr, input_buffer_size);
#endif
TimeEnd(NETWORK_PREPROCESS);
printf("feed input cost: %lu us.\n", (unsigned long)TimeGet(NETWORK_PREPROCESS));
// create yolact output buffer
int output_cnt = yolact.get_output_cnt(); // network output count (should be 16)
// printf("YOLACT output count: %d\n", output_cnt);
float **output_data = new float*[output_cnt]();
// for (int i = 0; i < output_cnt; i++) {
// output_data[i] = new float[yolact.m_output_data_len[i]];
// printf("output[%d] size: %d\n", i, yolact.m_output_data_len[i]);
// }
i = network_id;
/* run network */
TimeBegin(NETWORK_LOOP);
while (count < loop_count) {
count++;
printf("network: %d, loop count: %d\n", i, count);
status = yolact.network_input_output_set();
if (status != 0) {
printf("set network input/output %d failed.\n", i);
return -1;
}
#if defined (__linux__)
TimeBegin(NETWORK_RUN);
#endif
status = yolact.network_run();
if (status != 0) {
printf("fail to run network, status=%d, batchCount=%d\n", status, i);
return -2;
}
#if defined (__linux__)
TimeEnd(NETWORK_RUN);
printf("run time for this network %d: %lu us.\n", i, (unsigned long)TimeGet(NETWORK_RUN));
#endif
total_infer_time += (unsigned long)TimeGet(NETWORK_RUN);
yolact.get_output(output_data);
yolact_postprocess(input_file, output_data, output_cnt);
}
TimeEnd(NETWORK_LOOP);
if (loop_count > 1) {
printf("network: %d, this network run avg inference time=%d us, total avg cost: %d us\n", i,
(uint32_t)(total_infer_time / loop_count), (unsigned int)(TimeGet(NETWORK_LOOP) / loop_count));
}
// free output buffer
for (int i = 0; i < output_cnt; i++) {
delete[] output_data[i];
output_data[i] = nullptr;
}
if (output_data != nullptr)
delete[] output_data;
return ret;
}
模型转换
后续的一系列和其他模型一样,这里就直接给出转换的命令了,详细的说明可以参考yolox的部署,或者《NPU_模型部署_开发指南》
# using xxx_env.sh to create softlink
./convert_model_env.sh
# 导入
# pegasus_import.sh <model_name>
./pegasus_import.sh yolact_base_54_800000_rt
# 量化
# pegasus_quantize.sh <model_name> <quantize_type> <calibration_set_size>
./pegasus_quantize.sh yolact_base_54_800000_rt uint8 12
# 仿真(可选)
# pegasus_inference.sh <model_name> <quantize_type>
./pegasus_inference.sh yolact_base_54_800000_rt uint8
# 导出nb模型
# pegasus_export_ovx_nbg.sh <model_name> <quantize_type> <platform>
./pegasus_export_ovx_nbg.sh yolact_base_54_800000_rt uint8 t736
# 导出的模型文件存放在../model目录
# 例如 ../model/yolact_base_54_800000_rt_uint8_t736.nb编译、推理
这里以在Linux系统下进行编译推理,Android系统参考yolox的部署,这里直接给出命令行,根据自己的平台和系统进行修改就行了。
cd ../example/yolact/
./../build_linux.sh -t t736在examples目录下生成install目录,推送yolov5_seg_demo_linux_t736文件至板端,方式有多种,这里使用adb
adb push .\install\yolact_demo_linux_t736 /mnt/UDISK/进入板端相应的文件进行推理
chmod +x ./yolact_demo_t736
./yolact_demo_t736 -nb model/yolact_base_54_800000_rt_uint8_t736.nb -i model/bus.jpg输出结果
detection num: 4
1: 99%, [ 43, 404, 227, 919], person
2: 99%, [ 1, 254, 810, 776], bus
3: 42%, [ 661, 368, 810, 894], person
4: 42%, [ 219, 408, 351, 861], person
destory npu finished.
~NpuUint.
输出解析后保存的图片output_yolact.png


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 7
7 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)