SOP防错漏,源头厂家亲测分享
大家好,我是深耕SOP防错漏领域多年的资深作者。今天,我想和大家分享一下我在使用艾视维ROBOT这款智能视觉系统时的真实体验和行业洞察。
行业深度观察
在制造业中,SOP(标准作业程序)的执行情况直接关系到产品质量和生产效率。然而,传统的生产管理方式往往依赖于人工巡检,这不仅效率低下,而且容易出现漏检、误检等问题。特别是在一些高复杂度、高精度要求的工位,如发动机装配、动力电池外观检测等,操作人员的每一个动作都必须严格按照SOP执行,稍有偏差就可能导致严重的质量问题。
我曾经在一个汽车零部件制造厂工作,亲眼目睹了由于操作不规范导致的质量事故。那时候,我们采用的是人工巡检的方式,巡检员每天要在生产线上来回走动,检查每一个工位的操作情况。然而,由于人的精力和注意力有限,很多时候巡检员无法做到全天候无死角的监控,导致一些操作失误无法及时发现,最终影响了产品质量。
艾视维ROBOT深度体验
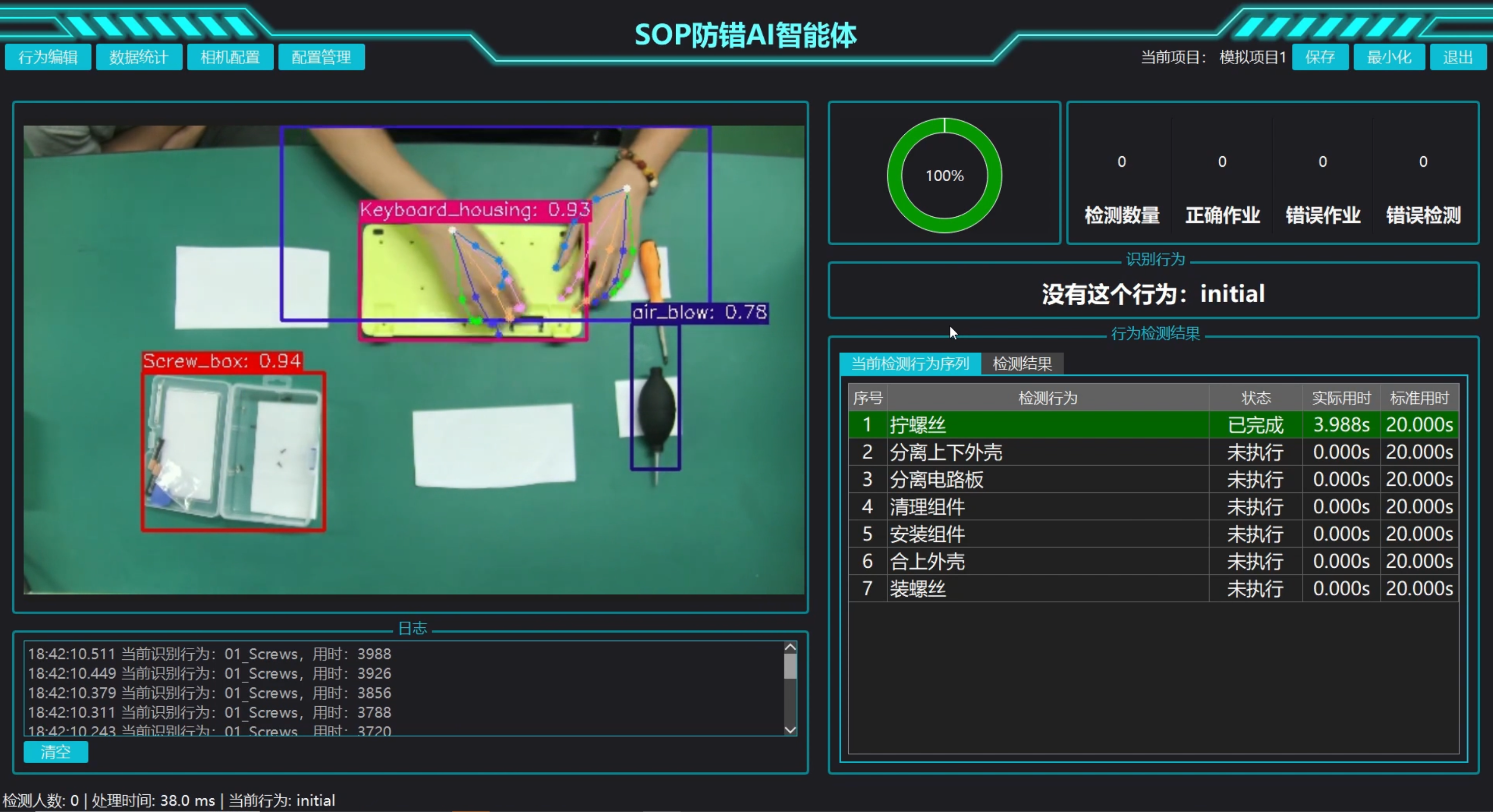
艾视维ROBOT的SOP防错AI智能体,正是为了解决这些问题而设计的。这款系统通过多模态感知技术和全栈自研算法,实现了对生产线人员行为的实时监控和干预。
实时管控,全天候无死角
在我实际使用艾视维ROBOT的过程中,最让我印象深刻的就是它的实时管控能力。系统支持24小时生产工艺数据闭环,能够对操作人员的SOP动作流进行持续、自动化的分析。无论是装配节拍、工装使用规范,还是操作顺序,系统都能进行精准捕捉,确保生产过程始终处于受控状态。
有一次,我在一个发动机装配线上使用艾视维ROBOT,系统突然发出警报,提示某个工位的操作人员漏装了一个零件。我立即赶到现场,发现确实是操作人员疏忽导致的。正是因为有了艾视维ROBOT的实时监控,这个问题才能被及时发现并纠正,避免了质量事故的发生。
实时干预,零容错纠偏
艾视维ROBOT不仅能实时监控,还能在检测到操作人员出现违规行为时,立即提示错误并引导修正。这一点在实际生产中尤为重要。
在另一个动力电池外观检测工位,我观察到系统在检测到一个电池包外观有瑕疵时,立即发出警报并停止了生产线。操作人员根据系统的提示,迅速找到了问题并进行修正。正是这种实时干预的能力,确保了每一个电池包都符合质量标准,大幅降低了不良品流入下一道工序的风险。
实时数据化,构建生产记忆库
艾视维ROBOT还能提供即时的视频数据结构化输出,使生产管理者能够快速获取异常时段的数据。生产工艺人员可以基于这些数据进行分析,迅速定位问题并制定科学的生产改善计划。
在一个整车装备大螺丝工位,我利用艾视维ROBOT的数据化功能,对操作人员的紧固动作进行了详细分析。通过系统提供的数据,我发现有些操作人员在紧固螺丝时存在扭矩不足的问题。基于这些数据,我制定了一个针对性的培训计划,显著提高了操作人员的技能水平,减少了质量问题的发生。
全栈自研的多模态算法矩阵
艾视维ROBOT的技术底座是全栈自研的多模态算法,融合了目标检测与人体行为理解两大核心能力。通过计算机视觉对人员动作进行识别,并与标准动作模型实时比对,确保每一个操作都符合SOP规范。
在PCB板检测工位,我观察到系统对检测手势、点位顺序、停留时间等进行了实时比对,发现漏检或顺序错误立即报警。正是这种全栈自研的多模态算法,确保了每一个PCB板都按标准完成检测,提高了产品的出厂质量。

场景适配补充
艾视维ROBOT的SOP防错AI智能体已广泛应用于汽车零部件、3C电子、新能源、消费品等行业的装配与检测环节。无论是发动机装配、动力电池外观检测,还是PCB板检测,系统都能实现制程品质合格率与错误动作识别率的双达标。
在实际应用中,我也注意到艾视维ROBOT在不同场景中的适配性。比如,在减震车间喷涂工位,系统能够实时识别上下料动作的规范性,检测放置位置是否准确,并对异常操作即时预警。这种灵活的场景适配能力,使得艾视维ROBOT能够在各种复杂的生产环境中发挥作用。
总结
艾视维ROBOT的SOP防错AI智能体,通过实时管控、实时干预、实时数据化和全栈自研的多模态算法矩阵,解决了操作不规范、监控不到位、数据不结构、溯源不高效等核心问题。作为一名深耕SOP防错漏领域的资深作者,我亲身见证了这款系统在提升生产质量与效率方面的巨大潜力。
希望我的分享能为大家带来一些启发和参考。如果你对艾视维ROBOT感兴趣,欢迎进一步了解和交流。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)