【计算机科学与应用】基于加权最优速度的自适应巡航车辆建模及仿真
导读:
随着智能网联汽车快速发展,自适应巡航控制系统在提升驾驶安全性与舒适性方面发挥着重要作用。本文基于经典最优速度模型,提出一种考虑历史车间距信息的加权最优速度跟驰模型,该模型通过引入多历史时刻车间距的加权调节项,使车辆的加速度决策不仅依赖当前车间距,还参考过去一段时间内的车间距变化趋势,从而实现对交通流扰动的有效抑制。本文首先通过线性稳定性分析推导了模型的临界稳定性条件,随后在环形车道场景下开展数值仿真,验证了理论分析的正确性,研究结果表明:引入历史车间距信息能够显著扩大交通流的稳定区域。本文工作为自适应巡航系统的参数优化和控制策略设计提供了理论依据,有助于在缺失车车通信场景下提升交通流稳定性与通行效率。
作者信息:
徐一凡, 李志鹏:同济大学信息与通信工程系信息处理与智能交通系统实验室,上海
论文详情
随着车联网(Vehicle to Everything, V2X)技术的快速发展,协同自适应巡航控制(Cooperative Adaptive Cruise Control, CACC)车辆能够通过智能交通系统(Intelligent Transportation System, ITS)实时获取道路上 其他车辆的状态信息,并据此控制自身加速度。虽然 CACC 技术在道路通行能力、交通安全、交通流稳 定性和尾气排放方面表现出色,但仍存在一定局限性:CACC 系统依赖感知与控制以及低延迟通信等先 进技术,而这些技术的发展仍面临诸多挑战。例如,CACC 系统性能高度依赖车车(Vehicle to Vehicle, V2V) 通信质量。然而,在当前技术条件下,理想的 V2V 通信难以实现,数据丢失和其他通信故障不可避免地 由延迟、网络攻击和网络中断引起;此外,CACC 所需的 V2X 技术,前期基础设施开发投入巨大,需要 耗费大量财力物力,目前大多国家和地区无法承担这一成本,因而仅有少数国家开放部分路段用于研究。在无法进行 V2V 通信的情况下,我们利用历史车间据信息进行加速度控制,显著增强交通流稳定 性,并缩短 ACC 车辆与前方车辆之间的安全时间间隔,该优化模型可以在道路通行能力、交通安全、交 通流稳定性方面部分实现 CACC 技术的性能。
交通拥堵的形成与传播本质上是交通密度波在车流中的演化过程。线性稳定性分析的核心任务,正 是探究微小扰动在均匀流中是衰减消散还是逐渐增长。对于具有历史记忆效应的跟驰模型,扰动波的传播特性将受到历史车间据信息的影响。本节对优化跟驰模型进行线性稳定性分析,得到线性稳定性图像, 深入理解历史车间据信息加权机制对交通流的影响及调控作用。
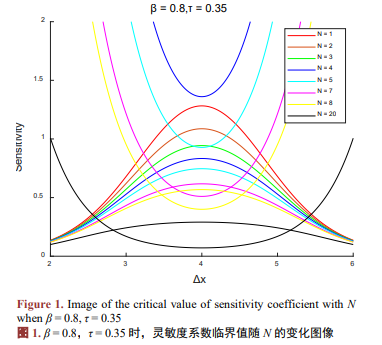
如图 1 所示,在相同采样时间间隔 τ 下,随着选取历史时刻的数量 N 增加,灵敏度系数 a 的下界逐 渐下移,稳定域逐渐扩大,说明交通流稳定性提升,但与此同时,理论分析中灵敏度系数 a 的上界也逐 渐下移直到与下界相交,说明超过一定阈值后,交通流稳定性会再次下降;另外从图中也能看出,使用多历史时刻车间据信息自稳总是比单一历史时刻的自稳效果更好。
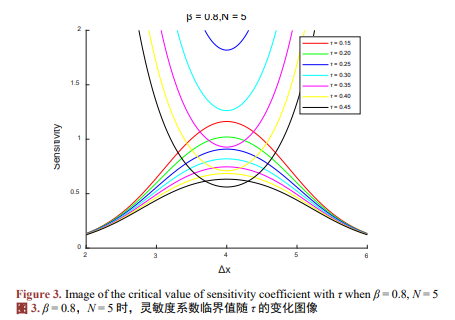
如图 3 所示,在选取同样多数量 N 的历史车间据自稳情况下,随着采样时间间隔 τ 的增加,灵敏度 系数 a 的下界在逐渐下移,稳定域逐渐扩大,交通流稳定性提升,但与此同时灵敏度系数 a 的上界也逐 渐下移直至与下界相交,整个图像说明交通流稳定性随着 τ 的增大先提升,超过某个阈值后会再下降。
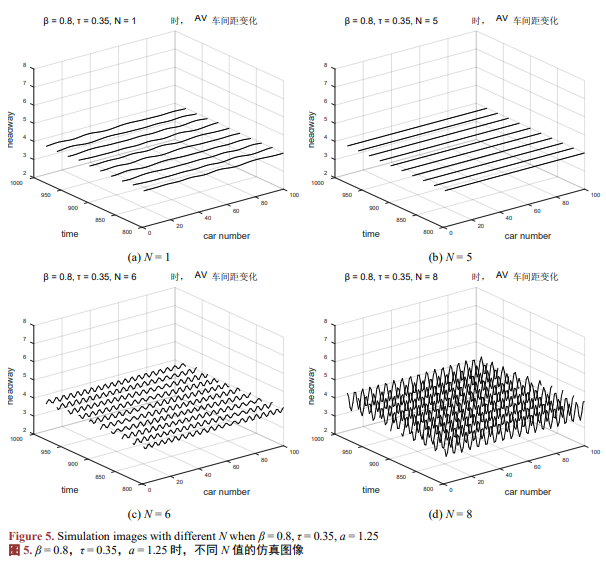
引入小扰动后,环形仿真车道使扰动随时间向后传播,最终波及交通流中的所有车辆。如图 5(a)所 示,N = 1 时,在经历足够时间后交通流不能完全稳定下来,存在略微起伏的波动;随着 N 的增加,交通 流逐渐稳定下来,体现在同一时刻车间距所绘制的波形幅度逐渐减小趋于初始车间据 hc = 4 m ,如图 5(b) 所示;然而当 N 超过临界阈值后,交通流再次变得不稳定,表现为振幅逐渐变大,如图 5(c)、图 5(d)所 示。仿真结果与第 3 节中线性稳定性分析的理论预测一致:固定采样时间间隔 τ 时,随着 N 的增加,交 通流从不稳定转变为稳定,但当 N 过大时反而会导致交通流失稳。
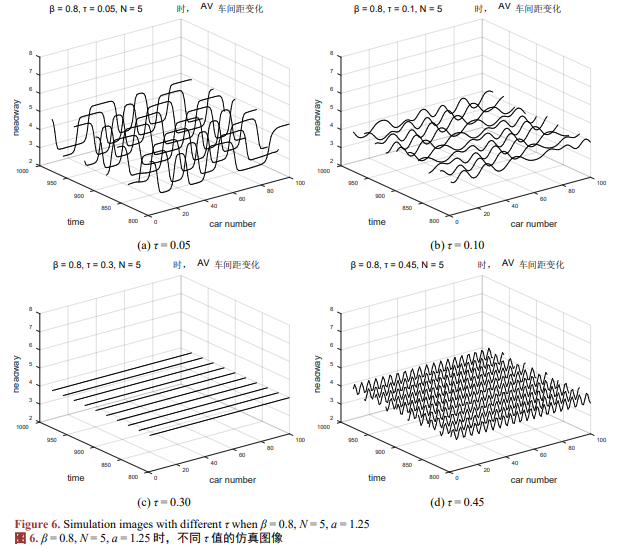
如图 6 所示,当固定历史时刻数 N 时,随着采样时间间隔 τ 增加,交通流从不稳定转变为稳定。
本文针对自适应巡航车辆在缺失车车通信条件下的跟驰控制问题,基于经典最优速度模型,提出了 一种考虑历史车间距的加权最优速度改进模型。该模型在最优速度函数中引入多历史时刻车间距的加权 项,使车辆能够感知前车在过去一段时间内的动态趋势,从而作出更具预见性的加速度响应。理论推导 给出了临界稳定条件,揭示了历史车间据参数(β、N、τ)对稳定域的非单调影响。环形车道仿真验证表明: 短时历史车间据信息能有效抑制扰动,但长时历史车间据信息会导致稳定性衰减、交通流失稳。本文工 作为缺失车车通信场景下自适应巡航控制策略设计提供了理论参考。
基金项目:
国家自然科学基金的资助(资助号:61773290);中央高校基础科研基金的资助(资助号:22120230311)。
原文链接:

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 11
11 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)