交通 | 利用大语言模型智能体实现实时车辆路径规划
论文原文
DENG J, ZHU Y, XIAO F. Leveraging large language model agents for cost-effective sensor data handling and urban traffic navigation[J]. Engineering Applications of Artificial Intelligence, 2026, 173: 114363.
https://www.sciencedirect.com/science/article/abs/pii/S0952197626006445
编者按
随着智慧城市建设的发展,城市交通系统中产生的传感器数据规模不断扩大、类型日益多样,传统依赖专用软件模块进行数据解析与决策支持的方式面临开发成本高、扩展性不足等问题。近年来,大语言模型在复杂推理与多源信息理解方面展现出新的潜力,为智能交通系统提供了新的技术路径。本文研究大语言模型智能体在传感器数据处理与城市交通导航中的应用,提出一个融合物联网数据与大语言模型推理能力的智能体平台。论文通过设计领域自适应提示机制,将数值与符号型传感器数据转化为结构化决策上下文,使模型能够统一理解多类型传感器信息。同时构建模块化智能体系统架构,将大语言模型与交通控制功能及物联网中间件集成,实现低成本部署与可扩展协同。实验结果表明,该平台可在有效识别多类传感器数据,在无需微调的情况下实现较可靠的路径决策准确率。笔者认为,论文的新颖性强,平台可实践性高,是一篇具有实际应用价值的佳作。
1 问题研究背景
近年来,大语言模型(Large Language Models, LLMs)在语义理解、复杂推理与任务规划等方面展现出显著能力。最新研究表明,先进的LLM在数学推理、代码生成及逻辑规划等任务中的准确率已超过90%,使其应用范围从传统自然语言处理逐渐扩展到复杂工程系统中的决策支持与智能控制领域。与此同时,物联网(IoT)技术的快速发展推动了智慧城市的建设,通过大量传感器、智能计量设备与监控系统实现对交通、能源与环境等城市资源的实时感知与管理。然而,城市系统规模庞大且数据类型高度异构,传统依赖专用控制器和定制软件的解决方案在开发成本、系统扩展性以及跨设备数据融合方面面临显著挑战。在城市交通管理领域,人工智能技术已被广泛应用于交通状态监测与拥堵预测,通过分析来自传感器、摄像头和GPS设备的大规模数据,实现交通信号优化与路径规划。然而,现有方法通常依赖针对特定任务开发的专用算法与软件系统,缺乏统一的数据处理与推理框架,难以灵活适应不断变化的城市交通环境。随着LLM在复杂推理和知识整合方面能力的提升,利用其构建智能体系统以统一处理多源传感器数据,并支持实时交通决策,成为智慧城市交通管理的重要研究方向。
2 研究内容与贡献
本文围绕智慧城市交通场景中的传感器数据处理与路径导航问题,提出基于大语言模型智能体的LASER Hub平台,主要贡献体现在以下几个方面:
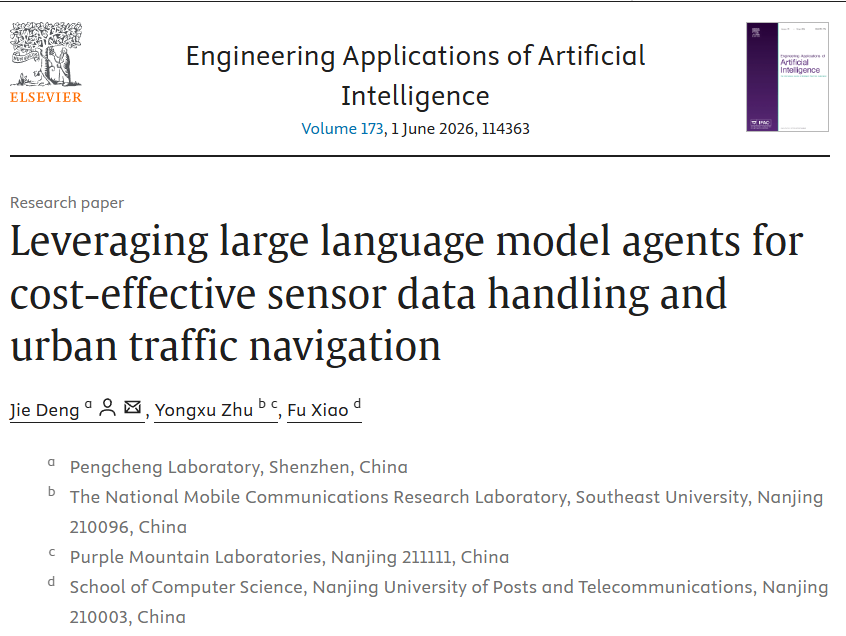
- 提出一种面向物联网场景的LLM智能体交通管理框架。本文构建了LASER Hub平台,将大语言模型、IoT数据库与智能体机制进行统一集成,实现对城市传感器数据与车辆路径请求的协同处理,为智慧交通系统提供了一种统一的数据理解与决策支持架构。
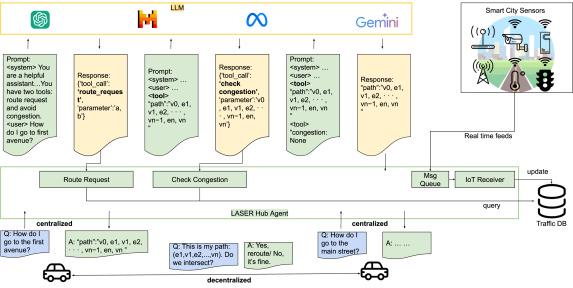
图:LASER Hub平台系统架构图
- 设计基于LLM与RAG结合的传感器数据处理与推理机制。通过引入检索增强生成(RAG)与智能体协作机制,使系统能够融合外部知识并对多类型传感器数据进行统一解析与推理,从而提升复杂交通场景下的决策准确性与上下文理解能力。
- 实现面向城市交通导航的实时智能决策能力。系统能够根据实时传感器数据动态生成路径建议,并支持自然语言形式的交通请求输入,在复杂城市路网环境中实现高精度路径规划与拥堵规避,提高交通系统的响应速度与用户体验。
- 提出一种低成本、可扩展的智慧城市部署方案。通过利用预训练大语言模型与开源框架构建系统架构,显著降低了传统专用软件系统在开发与维护上的成本,同时具备良好的可扩展性与灵活性,可适应不断增长的IoT数据规模与多样化交通应用需求。
3 模型构建
3.1 路径规划问题
在城市交通网络中,将道路系统建模为有向图 G=(V,E)G = (V, E)G=(V,E)。其中,节点集合V={v∣v∈R2}V = \{ v \mid v \in \mathbf{R}^2 \}V={v∣v∈R2}表示城市路口,边集合E={(x,y)∣x∈V,y∈V,x≠y}E = \{ (x, y) \mid x \in V, y \in V, x \neq y \}E={(x,y)∣x∈V,y∈V,x=y}表示道路连接关系。任意两位置之间的行驶路径可表示为从起点节点 v0v_0v0 到终点节点 vnv_nvn 的路径序列:Pv0,vn=⟨v0,e1,v1,e2,⋯ ,vn−1,en,vn⟩P_{v_0, v_n} = \langle v_0, e_1, v_1, e_2, \cdots, v_{n-1}, e_n, v_n \ranglePv0,vn=⟨v0,e1,v1,e2,⋯,vn−1,en,vn⟩。道路 eie_iei上的行驶时间由函数 d(ei)=f(ei,s,n,w,⋯ )d(e_i) = f(e_i, s, n, w, \cdots)d(ei)=f(ei,s,n,w,⋯)决定,其中包含道路长度、限速、车辆密度及天气等因素。路径总行驶时间为D(Pv0,vn)=∑i=1nd(ei)D(P_{v_0, v_n}) = \sum_{i=1}^{n} d(e_i)D(Pv0,vn)=∑i=1nd(ei),因此,城市路径规划问题可表述为寻找最小化总行驶时间的最优路径pv0,vn∗=argminpv0,vn∑i=1nd(ei)p^*_{v_0, v_n} = \arg\min_{p_{v_0, v_n}} \sum_{i=1}^{n} d(e_i)pv0,vn∗=argminpv0,vn∑i=1nd(ei)。考虑到道路通行时间具有动态变化特性,系统通过部署在道路上的物联网传感器实时采集交通数据,并由 LLM 智能体进行解析与推理,从而动态更新 d(ei)d(e_i)d(ei),并生成最优导航路径。
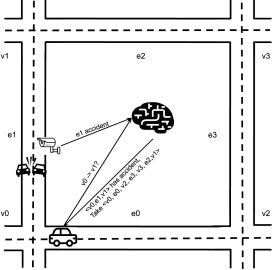
图:城市交通路径规划模型示意图
3.2 大语言模型
在路径规划框架基础上,引入大语言模型智能体(LLM Agent)进行交通决策。LLM 本质上是基于概率的生成模型,在给定输入提示序列{z0,z1,⋯ ,zm−1}\{ z_0, z_1, \cdots, z_{m-1} \}{z0,z1,⋯,zm−1} 时,通过最大化条件概率生成最可能的输出路径,即pv0,vn∗=llm(z0,z1,⋯ ,zm−1)=argmaxpv0,vnP(pv0,vn∣z0,z1,⋯ ,zm−1)p^*_{v_0, v_n} = \mathrm{llm}(z_0, z_1, \cdots, z_{m-1}) = \arg\max_{p_{v_0, v_n}} P\big(p_{v_0, v_n} \mid z_0, z_1, \cdots, z_{m-1}\big)pv0,vn∗=llm(z0,z1,⋯,zm−1)=argmaxpv0,vnP(pv0,vn∣z0,z1,⋯,zm−1)。然而,在真实城市路网中节点数量巨大,直接依赖 LLM 生成最优路径不仅搜索空间过大,而且需要大量专用训练数据,难以实现高效可靠的推理。为此,本文引入 LLM Agent 架构,通过智能体机制缩小 LLM 的决策空间,并结合导航函数 RRR 实现结构化路径搜索。在该框架下,最优路径生成概率可表示为P(pv0,vn∗∣s,τ)∝exp(R(pv0,vn,s,τ))P\big(p^*_{v_0, v_n} \mid s, \tau\big) \propto \exp\big( R(p_{v_0, v_n}, s, \tau) \big)P(pv0,vn∗∣s,τ)∝exp(R(pv0,vn,s,τ))。其中,sss 表示来自 IoT 传感器的交通信息,τ\tauτ 为交通状态更新与路径请求之间的时间窗口,RRR为由 LLM Agent 调用的导航函数。该模型分别刻画了:(1)传感器信息处理正确性,(2)路径请求解析能力,以及(3)导航算法返回最优路径的概率,从而提高系统在动态交通环境中的决策准确性与可靠性。对于(3),技术上已经有成熟的 API 可以直接使用,因此本文主要针对任务(1)和(2)提出算法和解决方案。
4 智能路由系统
4.1 传感信息处理
在LASER Hub架构中,传感信息处理由LLM智能体负责完成,同时利用了大语言模型应对非结构化数据的能力智能体精确处理结构化数据的能力。系统整体结构如下图,由前端API、后端数据库以及核心智能模块构成,其中核心模块包括大语言模型、Agent调度机制和一组数据处理函数。城市道路中的各类IoT传感器会周期性上传JSON格式的数据消息。即使JSON格式LLM事先未知,LLM Agent首先根据系统提示(Prompt)解析输入数据中的sensor_type等字段,并自动调用对应的处理函数(如handle_distance等),实现对不同类型传感器数据的统一解析与存储。为提高系统的可扩展性与可靠性,系统在提示设计中明确规定智能体角色、任务流程以及输出格式,并通过结构化推理提示引导LLM完成多步决策。与此同时,每类传感器均对应专门的处理函数,其输入输出格式、功能说明及执行状态均被严格定义,从而保证LLM能够准确选择并调用相应工具。该设计实现了对多源异构传感器数据的自动化解析与管理,为后续交通状态感知与路径规划提供实时数据支持。
图:LASER Hub通用传感器信息接收模块
4.2 集中式路由规划
在智慧城市交通系统中,路径规划需要与实时感知信息紧密结合。为此,LASER Hub将IoT传感数据处理与交通导航统一集成在同一LLM Agent框架中,实现从传感信息解析到路径决策的端到端推理。该架构避免了传统系统中感知层与决策层之间的语义转换与多模块通信开销,从而提高系统整体效率。系统部署采用集中式与分布式结合的结构,其中集中式实例部署在城市交通控制中心(即“城市大脑”),负责汇聚道路传感器数据并处理车辆导航请求;同时,车辆终端中部署轻量级实例,用于后续的车辆协同与通信。
在路径规划算法方面,当中心服务器接收到IoT传感信息后,会实时更新道路状态数据库。当车辆以自然语言形式发送路径请求时,LASER Hub Agent通过PromptTemplate将请求嵌入结构化提示,并提交至LLM进行推理。LLM根据提示上下文调用相应函数,例如通过route_request生成候选路径,并利用congestion_check函数结合实时传感数据对路径进行验证。系统通过多轮迭代不断评估候选路径的交通密度、拥堵程度及突发事件等信息,直到找到满足当前交通状态的最优路径并返回给用户。
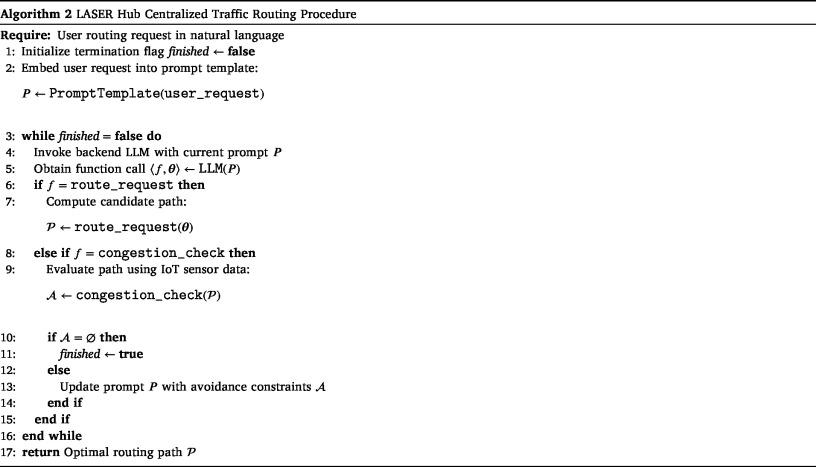
图:集中式路径规划算法
4.3 分布式冲突规避
在突发交通事件(如交通事故或道路封闭)发生时,车辆通常按照中心服务器提供的路径建议绕行。然而,如果大量车辆同时采用相同的替代路径,可能在新的路段上形成新的拥堵。因此,本文在集中式路径规划基础上进一步提出分布式冲突避免机制,通过车辆间协同通信实现动态路径调整。系统中每辆车被赋予一定的通信广播半径和优先级,当车辆进入彼此通信范围时,可建立点对点连接并交换当前路径与交通状态信息,从而检测潜在的路径冲突或拥堵风险。
在算法层面,车辆首先按照集中式LASER Hub生成的路径行驶。当检测到路径交叉或拥堵风险时,系统根据车辆优先级进行协调:优先级较低的车辆主动放弃当前路径,并向系统请求新的替代路线以避开冲突区域。通过这种基于车辆间协作的分布式机制,系统能够在局部范围内实时调整路径选择,在避免局部拥堵的同时保持整体交通规划的一致性。
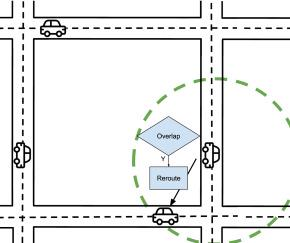
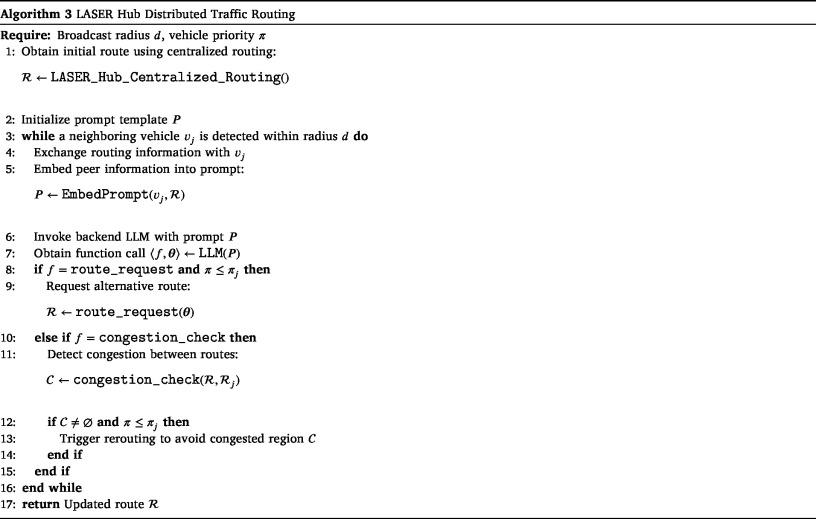
图:分布式冲突避免模型和算法
4.4 开源系统实现
在系统实现方面,LASER Hub基于Python平台并采用LangChain框架进行开发。LangChain为大语言模型应用提供了统一的开发接口,可支持包括OpenAI、Mistral以及Meta Llama等多种主流LLM模型。考虑到现有Agent功能主要面向商业API服务,本文对系统进行了扩展设计,使LASER Hub能够兼容本地部署的开源大语言模型,从而降低系统部署成本并提升研究与应用的可复现性。
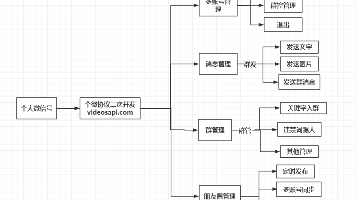
系统实现主要由四个核心模块组成。首先,LASER HubFunctions模块作为系统核心,扩展了LangChain的ChatModel接口,用于支持Agent调用各类功能函数,并支持插件式扩展。其次,通过修改Ollama模块,使不具备原生工具调用能力的开源模型也能够作为Agent运行。第三,Utility模块负责系统认证、数据库读写及其他辅助功能。最后,Main模块负责定义Agent结构、提示模板以及工具绑定,从而构建完整系统。该架构进一步结合LLM Agent与检索增强生成(RAG)机制,实现面向智慧城市应用的可扩展IoT数据处理与交通决策平台。
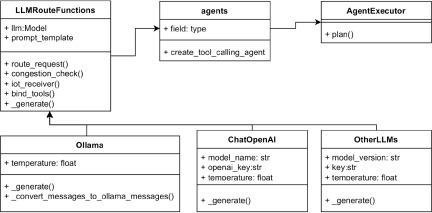
图:LASER Hub实现类结构关系图
5 仿真实验
5.1 传感数据接收与处理
为验证LASER Hub在物联网传感数据处理方面的性能,本文构建了一个基于真实数据的仿真环境,并对多种开源大语言模型进行了对比测试。实验采用Python 3.10作为开发环境,在配备48GB显存的NVIDIA RTX 4090 GPU上运行。为保证系统部署的可行性与成本可控性,实验选取了多种可本地部署的开源大语言模型,包括Llama3.3、Gemma、Mistral、Mixtral、Qwen、Qwq以及Command-R等,并通过Ollama平台进行模型托管,利用LangChain框架完成API调用与Agent调度。
在数据集方面,实验使用Edge-IIoTset数据集作为传感器数据来源。该数据集基于真实IoT/IIoT测试平台构建,包含多种设备、通信协议以及云边协同场景的数据。为覆盖不同类型的传感信息,实验选取了五类具有代表性的传感器数据,包括土壤湿度传感器、心率传感器、温湿度传感器、接近传感器以及红外传感器。系统接收到传感数据后,需要依次完成三个关键任务:识别传感器类型并调用正确的处理函数、将数据写入后端数据库,以及保证写入数据的准确性。通过这三个阶段的检测,可以全面评估LLM Agent在函数调用、数据处理与数据库操作方面的执行能力。
实验结果表明,大多数模型(如Llama系列、Qwen、Command-R和Qwq)均能够正确识别传感器类型并完成函数调用,同时实现数据写入数据库的基本功能。然而,在数据一致性与执行稳定性方面,不同模型之间存在明显差异。其中,Llama3.3在所有传感器类型的测试中均表现出最高的稳定性,在函数调用正确率、数据写入成功率以及数据一致性方面均达到100%的准确率,显示出其在复杂IoT数据处理任务中的可靠性优势。此外,实验还分析了系统的处理时延与准确率之间的关系。结果表明,虽然高准确率通常伴随略长的推理时间,但所有传感器数据均能够在30秒以内完成处理,说明LASER Hub能够满足近实时数据处理需求。总体而言,实验结果验证了基于LLM Agent的架构能够有效处理异构传感器数据,并为后续交通决策提供稳定的数据支撑。
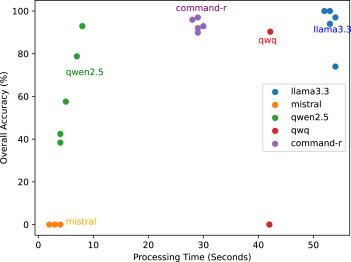
图:不同LLM模型下传感器数据处理正确率与时间(每个点代表一种类型的传感器)
5.2 路径规划
为进一步验证LASER Hub在真实交通环境中的路径规划能力,本文基于真实城市交通数据构建仿真场景。实验采用纽约出租车行程数据集(Taxi Trip Record Data)模拟车辆导航请求,该数据集包含出租车的上车时间、上车位置及下车位置等信息,可用于生成大量真实路径请求。与此同时,为模拟交通事故对道路通行状态的影响,实验引入纽约交通事故数据集(New York Vehicle Collisions),并根据事故发生时间与位置生成IoT传感器消息。当某一路段发生事故时,系统将该路段未来两小时内的通行时间随机增加10–30分钟,以模拟事故导致的拥堵情况。
在模型评估方面,实验对多种开源大语言模型进行了对比,包括Llama3、Mistral、Mixtral、Gemma和Qwen,并通过500次路径请求测试其处理时间与准确率。结果表明,Mixtral在路径规划任务中取得最高准确率(92%),但推理时间较长;Mistral在效率与准确率之间取得较好平衡,在23秒内实现83%的路径规划准确率;Gemma虽然能够正确处理任务,但推理时间较长且准确率略低。部分模型(如Qwen)在工具调用与JSON参数识别方面表现较弱,导致准确率较低。总体来看,中等规模模型在推理速度与准确率之间表现出更优的权衡,更适合实时交通管理应用。
在路径优化效果方面,本文进一步将LASER Hub与传统导航系统进行对比。实验结果表明,两种方法生成的路径距离基本相当,LASER Hub路径平均长度为47 km,仅比传统导航的46.7 km略长约1%。然而,由于LASER Hub能够利用传感数据提前检测交通事故并动态调整路线,其平均行程时间显著降低。实验结果显示,LASER Hub平均行程时间为2266秒,而传统方法为2736秒,整体出行时间减少约18%。该结果表明,通过融合实时传感信息与LLM智能体推理能力,LASER Hub能够有效规避交通拥堵,从而显著提升城市交通导航效率。
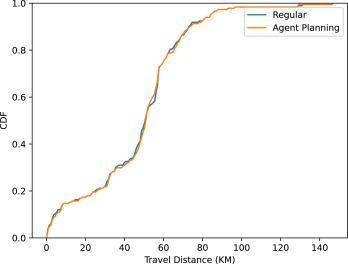
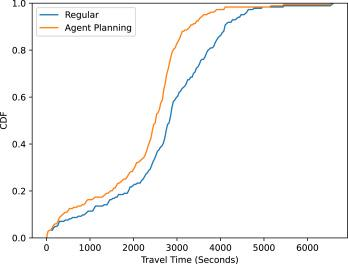
图:路径规划仿真表明由于LASER Hub能够利用传感数据提前检测交通事故并动态调整路线,其平均行程时间显著降低
6 结论及未来方向
本文提出了一种面向智慧城市交通管理的LLM智能体平台LASER Hub,通过将大语言模型、IoT数据库与智能体机制相结合,实现了对多源传感器数据的统一处理以及城市交通路径规划。实验结果表明,系统能够在约30秒内准确完成传感数据解析,并通过实时拥堵检测与路径调整机制,使平均出行时间降低约18%。与传统依赖专用软件的交通系统相比,LASER Hub在成本、可扩展性与灵活性方面具有明显优势,同时能够利用自然语言接口和检索增强机制提升系统的交互能力与决策质量。
未来研究将进一步提升系统在复杂交通环境下的适应能力,例如针对事故后的动态交通演化进行建模,并通过领域数据对基础大模型进行微调,以提升推理精度并降低响应时延。此外,轻量化或蒸馏模型有望提升大规模IoT部署效率,同时结合LLM感知的资源调度与标准化智能体通信协议,将进一步推动该框架在智慧城市交通管理中的实际应用。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 10
10 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)