智能交通顶刊TRC论文分享|GATSim:大模型驱动的生成式出行仿真
本推文介绍了一项关于城市出行仿真领域的前沿研究成果《GATSim: Urban Mobility Simulation with Generative Agents》。该论文发表于期刊《Transportation Research Part C: Emerging Technologies》,由同济大学道路与交通工程教育部重点实验室团队完成。该研究针对传统基于智能体的城市出行仿真依赖刚性规则、难以刻画人类出行决策的复杂性、适应性与行为多样性、缺乏自适应学习与社会交互机制等瓶颈,提出了全新的生成式智能体出行仿真框架GATSim。该框架以大语言模型(LLM)与生成式智能体技术为核心,构建具备专属认知结构的智能体,融合城市出行基础模型、智能体认知系统与交通仿真环境;设计分层记忆系统支持时空关联信息高效检索,提出多尺度反思机制驱动出行行为自适应学习;通过规划—响应—反思的认知闭环,让智能体基于社会经济属性、生活方式与动态偏好自主做出出行决策。其创新的认知架构解决了传统规则化建模行为单一、适应性差的问题,分层记忆与多模态检索提升了时空决策合理性,多尺度反思实现经验到行为模式的转化,最终使生成式智能体在角色扮演场景中表现与人类标注者相当,并能自然涌现真实宏观交通流特征,在微观行为真实性与宏观流演化规律上均实现突破,有效推动城市出行仿真从规则驱动向智能驱动范式转型。
论文链接:https://arxiv.org/pdf/2506.23306
代码链接:https://github.com/qiliuchn/gatsim
推文作者为邱雪,审核为龚裕涛和黄星宇。
一、研究背景与研究内容
1. 研究背景
城市出行仿真是交通规划、政策评估与路网优化的核心支撑技术,现有主流方案存在明显短板:一方面,传统基于智能体的出行仿真高度依赖刚性规则、固定效用函数或预定义行为脚本,难以刻画人类出行决策的复杂性、自适应能力与行为多样性,无法还原真实社会交互与经验学习过程;另一方面,通用生成式智能体架构未针对城市出行场景定制,缺少适配时空决策的记忆机制、动态规划响应逻辑与多尺度反思能力,难以支撑真实、连续、可演化的出行行为模拟。因此,亟需一套融合大语言模型与专用认知结构、能实现自适应学习与社会协同的生成式智能体城市出行仿真框架,以突破传统仿真行为刻板、适应性弱、真实度不足的瓶颈。
2. 研究内容
(1)出行场景专用认知建模
人类出行依赖长期经验、时空记忆与偏好演化,而通用智能体缺少分层记忆、时空关联检索与心理可信的遗忘机制,难以支撑符合出行规律的决策推理。因此,需要研究出行场景专用认知建模。
(2)动态行为自适应与规划一致性
路网拥堵、事件扰动、行程延误频发,智能体需实时修订计划并保持全天活动链逻辑连贯,传统固定计划模式无法应对动态环境与突发变化。研究实现动态行为自适应与规划一致性的有效方式非常重要。
(3)多智能体社会协同与交互建模
真实出行包含家庭协作、朋友相约、拼车接送等社交行为,现有模型多为独立决策,缺少自然语言交互与任务协同机制,易出现重复执行、责任遗漏等协调失效问题。研究多智能体社会协同与交互建模,可以有效解决此问题。
(4)LLM固有缺陷与出行约束适配
生成式智能体易出现时空幻觉、常识违背、指令执行偏差、空间推理不足等问题,且需严格遵守交通规则、时间窗口、出行成本等领域约束,本文对这些问题进行了深入的研究。
(5)微观行为真实度与宏观流自涌现平衡
既要保证个体决策接近人类标注水平,又要让大量智能体自主演化出早晚高峰、拥堵扩散、事故响应等宏观交通模式,这使得建模与验证复杂度显著提升。在交通建模中,需要研究实现微观行为真实度与宏观流自涌现平衡的有效方式。
二、研究方法
研究以大语言模型与生成式智能体为核心,构建面向城市出行的GATSim一体化仿真框架,采用“仿真环境搭建—基础模型构建—智能体认知设计—多尺度验证”的完整技术路线,实现从微观个体行为到宏观交通流的全链路智能仿真。
1. 整体框架设计
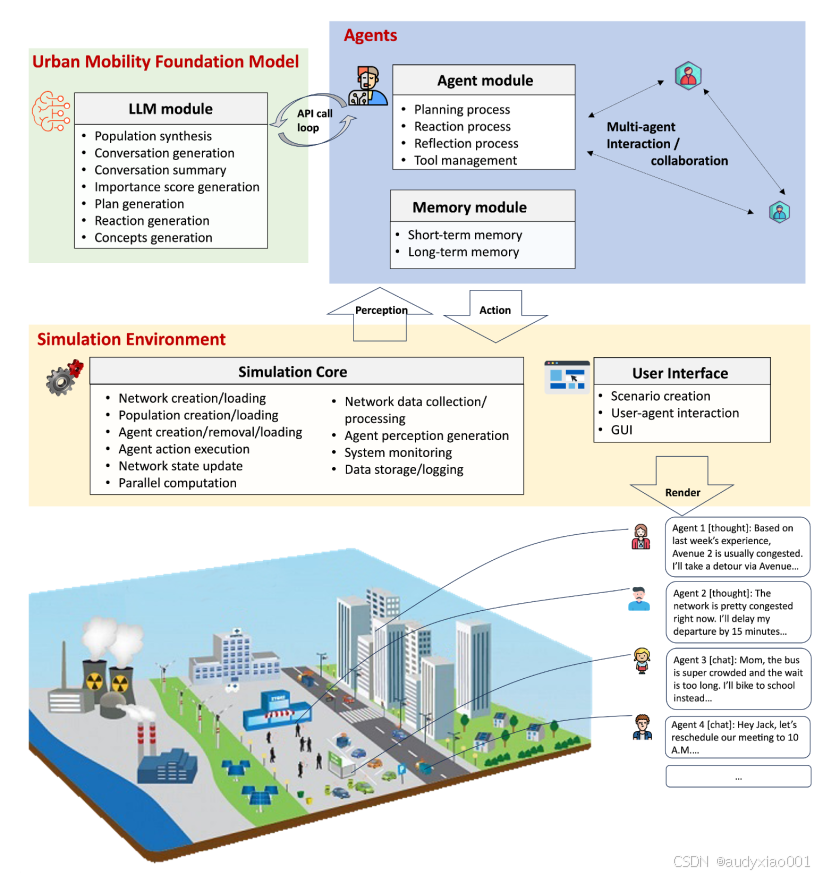
图1 GATSim框架的整体结构
如图1所示,该框架整体构建了一个“基础模型—多智能体—仿真环境”三层协同的城市出行模拟体系,用于刻画个体决策与宏观交通演化之间的关系。其核心思想是以大语言模型为认知引擎,将人类出行中的经验、记忆与交互机制引入仿真系统,从而实现更加真实的行为建模与交通模式生成。
在基础模型层(Urban Mobility Foundation Model)中,系统以大语言模型作为统一的能力支撑,承担人口生成、行为生成与认知建模等功能。通过人口合成模块,可以构建具有多样属性的虚拟居民;通过对话生成、计划生成与反应生成模块,模拟个体在出行过程中的决策与交流行为;同时引入重要性评分与概念生成机制,对信息进行筛选与抽象,从而为后续智能体的决策提供具备语义与结构化特征的认知基础。
在智能体层(Agents)中,每个个体被建模为具备认知能力的自治Agent,其内部由行为决策模块与记忆模块共同构成。行为决策模块负责完成出行计划制定、环境变化响应以及基于历史经验的反思调整,并可调用外部工具辅助决策;记忆模块则通过短期记忆与长期记忆的分层设计,使智能体能够持续积累经验并影响后续行为。此外,多个智能体之间通过自然语言交互与协同机制形成社会关系,例如协同出行、时间协调等,从而进一步增强模拟的真实性与复杂性。
在仿真环境层(Simulation Environment)中,系统提供了完整的运行载体。仿真核心模块负责路网构建、人口与智能体加载、行为执行以及交通状态更新,并支持并行计算以应对大规模模拟需求。同时,系统通过数据采集与日志记录实现全过程监控与分析。智能体与环境之间通过“感知—决策—行动”的闭环进行交互,智能体实时感知交通状态并调整行为,其行动又反过来影响整体交通演化。
在用户交互层(User Interface)中,系统为研究者提供场景配置与可视化能力。用户可以自定义仿真场景、干预环境变量,并观察智能体行为与交通状态变化过程。最终,系统以城市级可视化形式呈现仿真结果,包括个体决策轨迹、交互行为以及宏观交通现象,如拥堵形成与扩散等。
2. 仿真环境构建方法
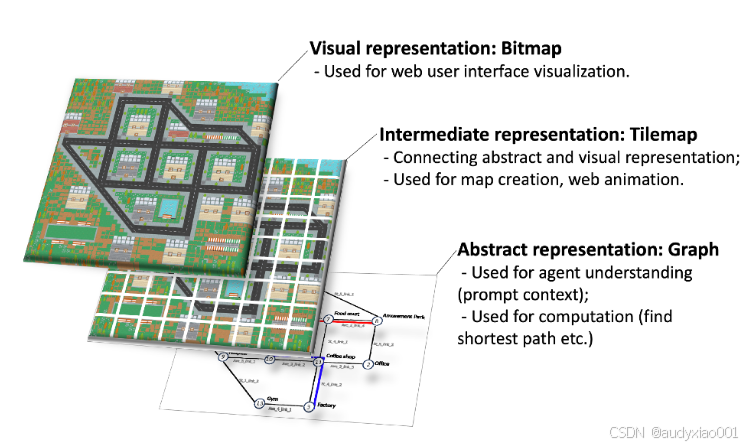
图2 分层交通路网表示结构
图2展示了城市空间在仿真系统中的三层表示结构,即从抽象计算到可视化呈现的逐级映射过程,核心目的是在“机器理解”与“人类观察”之间建立统一桥梁。
首先,在最底层的抽象表示(Graph)中,城市被建模为图结构,由节点与边构成,分别对应路口与道路连接关系。这一层主要服务于智能体的理解与计算,例如路径规划、最短路径搜索以及交通状态推理等。对于大语言模型驱动的智能体而言,图结构还可以作为一种结构化上下文输入,使其能够在语义层面理解空间关系,从而支撑出行决策。
在中间层的中间表示(Tilemap)中,图结构被进一步映射为网格化的地图表示。每个网格(tile)对应现实中的一小块区域,例如道路、建筑或绿地等。该层起到承上启下的作用,一方面保留了空间拓扑关系,另一方面具备一定的可视化属性,便于进行地图构建、动态渲染以及网页动画展示等。相比纯图结构,Tilemap更适合表达局部空间细节与连续区域信息。在最上层的可视化表示(Bitmap)中,Tilemap被渲染为最终的图像形式,用于用户界面展示。该层强调视觉效果与用户交互,能够直观呈现城市布局、交通流动以及智能体行为轨迹等信息,是人类观察和分析仿真结果的主要载体。
3. 城市出行基础模型构建方法
(1)叙事式虚拟人口合成
该方式通过prompt约束年龄、家庭、职业、收入分布,生成带生活方式与偏好的个性化智能体档案。
(2)LLM混合调度策略
该策略按任务复杂度分级使用大模型。其中,大型LLM负责全天活动规划,中型LLM负责实时响应与每日反思,小型LLM负责聊天、摘要、重要度打分等轻量任务。
4. 生成式智能体认知建模方法
(1)分层记忆系统构建
在记忆建模方面,系统采用分层结构以刻画智能体的持续认知能力。其中,短期记忆主要用于存储当日出行计划、当前状态以及来自环境的实时感知信息,具有时效性强、更新频繁的特点,为即时决策提供直接依据;长期记忆则以统一的概念节点(ConceptNode)形式进行组织,对历史事件、对话内容及行为反思进行结构化存储,并在节点中融合时空属性、语义信息、重要度评分及时间衰减因子,从而形成具有多维特征的经验记忆库。
在记忆访问机制上,系统引入多模态检索方法,通过融合关键词匹配、语义相似度计算以及时空关联度评估,实现与当前出行任务高度相关的记忆精准召回。该机制不仅能够提升检索的准确性,还能增强智能体在复杂场景下的情境理解能力。同时,为了模拟人类记忆的动态变化过程,系统设计了心理遗忘机制,以记忆重要度为核心依据,通过幂函数形式设定记忆的有效期限,使重要记忆能够长期保留,而普通记忆则随时间快速衰减,从而在保证关键经验持续发挥作用的同时,避免记忆冗余对决策效率的影响。
(2)活动规划与动态响应机制
图3刻画了一个以“记忆—交互—推理”为核心的日常出行决策闭环过程,从前一日经验出发,经由当日感知与社交互动,最终生成并动态修订个体的活动计划,体现出强烈的时间连续性与情境适应性。
在日计划生成阶段,整体流程可以概括为“三阶段机制”。首先是上下文准备,系统在一天开始前整合前一日的长期反思(Long-term reflection)与日终反思(Daily reflection),并结合当日初始感知信息(如广播事件、活动安排等),形成完整的决策上下文。这一步相当于为智能体提供“记忆+环境”的初始认知基础。随后进入社交协同阶段,智能体通过与家庭成员、朋友等进行交互(如接送孩子、聚餐安排、健身计划等),对原有计划进行约束与调整,使出行行为更符合真实社会关系中的协同逻辑。最后,在LLM推理规划阶段,大语言模型基于上述上下文与社交信息进行综合推理,生成初始的全天活动链(Initial activity plan),包括出发时间、出行方式、路径选择及活动描述等内容。
在计划执行过程中,系统并非静态执行既定方案,而是通过“四阶段动态修订机制”持续优化决策。首先是感知阶段,智能体实时获取环境变化(如交通拥堵、活动人流密集等);其次是记忆检索阶段,从长期记忆与新形成的概念中召回与当前情境相关的经验(例如某路段高峰拥堵的历史信息);接着进入社交交互阶段,智能体可能与他人沟通以调整安排(如取消聚会或更改时间);最终在决策重规划阶段,LLM结合感知、记忆与交互结果,对当前计划进行局部或全局更新(如改道、延迟出发或更换目的地)。
该动态修订过程并非持续高频触发,而是发生在若干关键决策节点,例如路口等待(需要路径选择)、活动间隙(可调整后续安排)以及行程结束(触发总结与反思)等时刻。这种事件驱动的更新机制既保证了决策的实时性,又避免了不必要的计算开销。
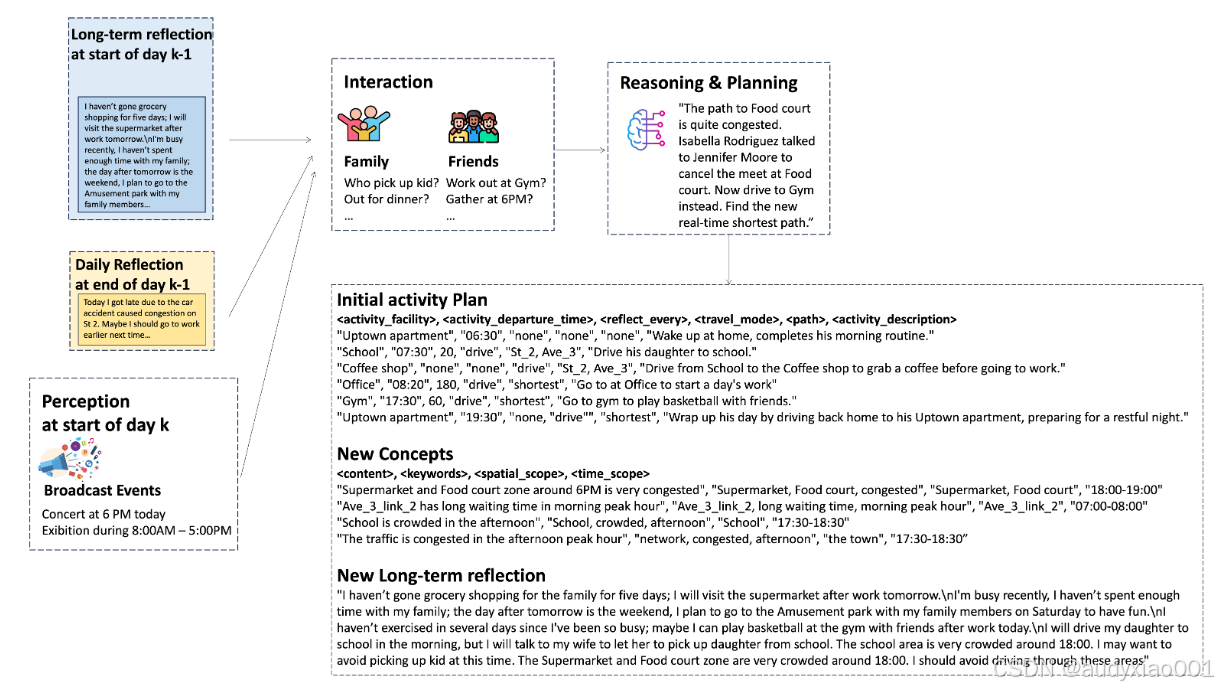
图3 生成式智能体活动规划流程
(3)多尺度反思学习机制
图4展示了一个跨时间尺度的反思与学习机制,通过“日内—日终—跨日”三个层级的循环,使智能体能够从经验中持续优化出行策略,实现行为演化。
从单日(Day k)过程来看,系统首先以长期反思(Long-term Reflection)作为初始认知基础,该内容在一天开始时被加载,包含历史经验与既有行为偏好。随后,在环境事件(如交通事故)驱动下,智能体生成当日活动计划并开展实际出行,在执行过程中形成“日内经验(Daily Experiences)”。在这一过程中,智能体会进行即时反思,即在实时决策时记录行为依据,例如因拥堵而选择改道或切换路径,这类信息直接服务于当前决策,同时作为后续总结的原始素材。
当一天结束后,系统进入每日反思阶段(Daily Reflection)。此时,智能体对当天的行为与环境进行整体回顾,总结出具有普遍意义的经验,例如识别高峰时段拥堵规律、判断某些路线的可靠性,或调整出行时间策略(如提前出发)。这些总结相较于即时反思更加抽象,具有一定的泛化能力。
进入下一天(Day k+1)时,前一日的每日反思将被进一步整合进长期反思(Long-term Reflection)中,形成跨日积累的知识与行为模式。这一过程体现为对长期记忆的更新,使得智能体能够在更长时间尺度上调整出行策略,例如形成稳定的通勤习惯、规避高风险路段或优化时间安排。新的长期反思又会作为下一日决策的起点,参与新一轮“计划—执行—反思”的循环。
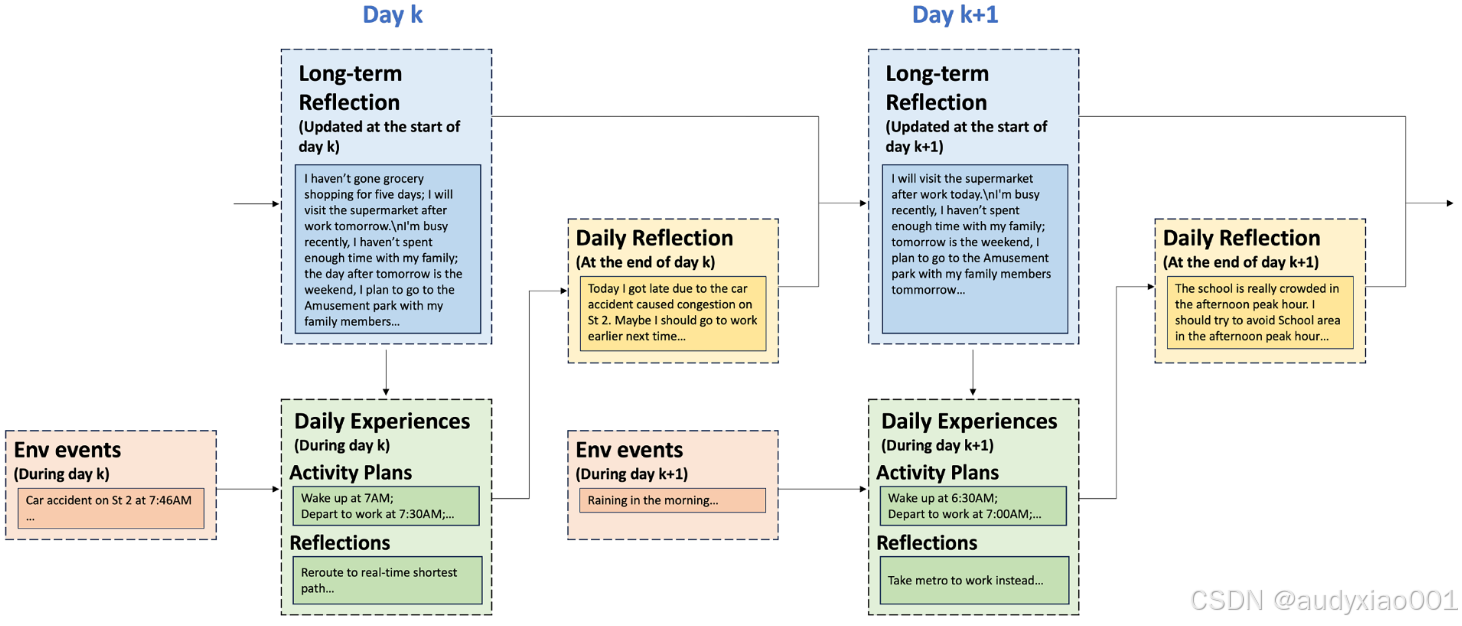
图4 多尺度反思与学习机制
三、实验结果与分析
1. 实验设置
(1)数据集
本实验采用定制化合成仿真数据集,基于经典Nguyen-Dupuis网络改编构建含地铁的多模式交通网络,13个节点覆盖居住、就业、商业等全类型城市功能设施;同步生成70名匹配真实城市人口统计规律的虚拟个体,覆盖多元年龄、家庭、职住与车辆保有特征,为仿真提供高异质性的可控实验环境。
(2)模型设置
本研究采用混合大语言模型调度策略,以GPT-4o完成人口合成、Qwen3支撑智能体规划与反思等核心认知任务,轻量模型处理辅助工作;仿真以5分钟为时间步长,配套分层记忆与多尺度反思机制,同时搭建微观行为-宏观流双维度验证体系,通过人类标注对比与传统模型基准完成有效性校验。
2. 对比实验
本部分从微观行为真实性、宏观交通流演化、突发事件响应三个维度,对GATSim仿真结果进行分析,选取4张核心结果图展开重点解读。
(1)微观行为真实性对比结果
实验以人类标注者为基准,采用LLM-as-judge对50个出行场景进行双盲评估。结果显示,GATSim智能体在46%的场景中表现更真实,人类标注者占优40%,平局14%,贝叶斯分析表明智能体具备与人类相当的决策真实度。其优势源于更强的上下文信息整合能力,能综合记忆、路况、社交约束做出连贯决策,验证了认知架构在微观出行行为上的有效性。
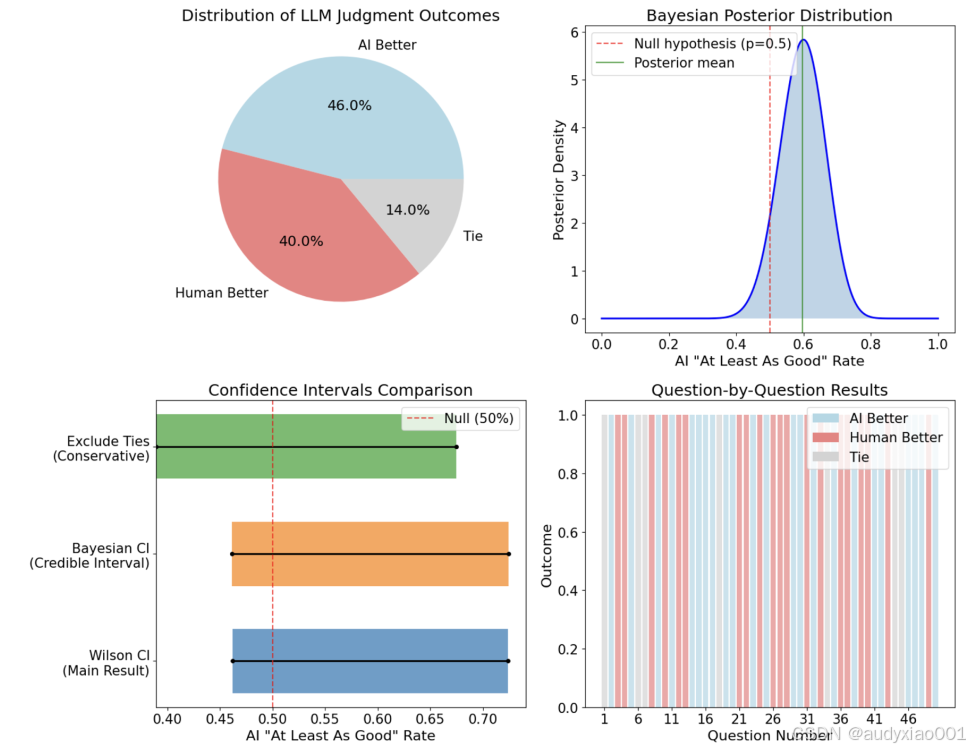
图5 LLM评判结果统计
(2)多日宏观交通流演化结果
连续3日仿真结果显示,智能体通过反思学习逐步调整出发时间与路径,早高峰从周一7:30–8:00向周三7:00–7:30提前扩散,拥堵程度持续降低,路网流量更均衡。该结果表明,GATSim无需显式编码规则,即可通过个体学习自涌现出接近交通均衡态的宏观流,再现真实城市早晚高峰的动态收敛过程。
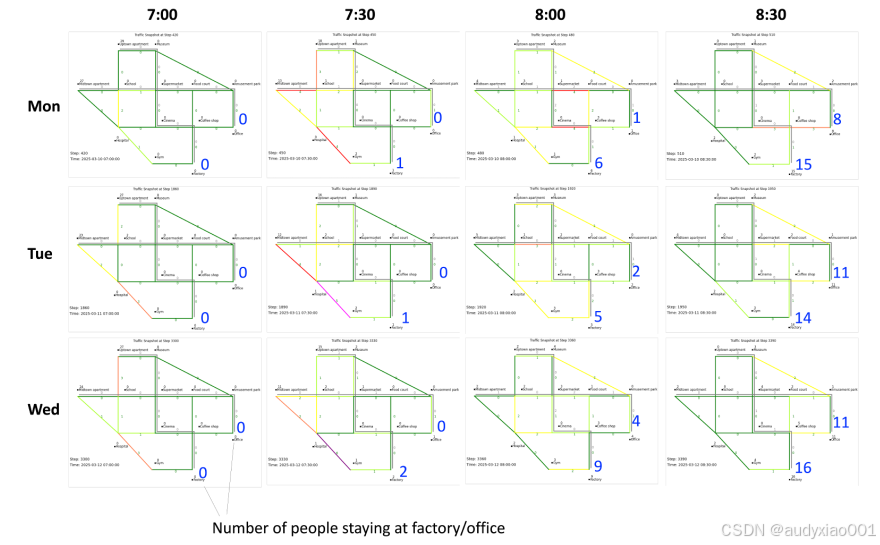
图6 早晚高峰时空演变
(3)路网突发事件响应结果
在Ave_2_link_2路段容量减半的突发事件下,智能体群体呈现典型的“即时拥堵—短期规避—缓慢恢复”响应规律:事发当日该路段流量骤降,后续两日仍保持近零通过量,表现出合理的风险规避与经验记忆效应。这一结果证明GATSim能真实复现人群对路网扰动的滞后性、过度反应与非对称恢复特征,具备突发事件场景的仿真价值。
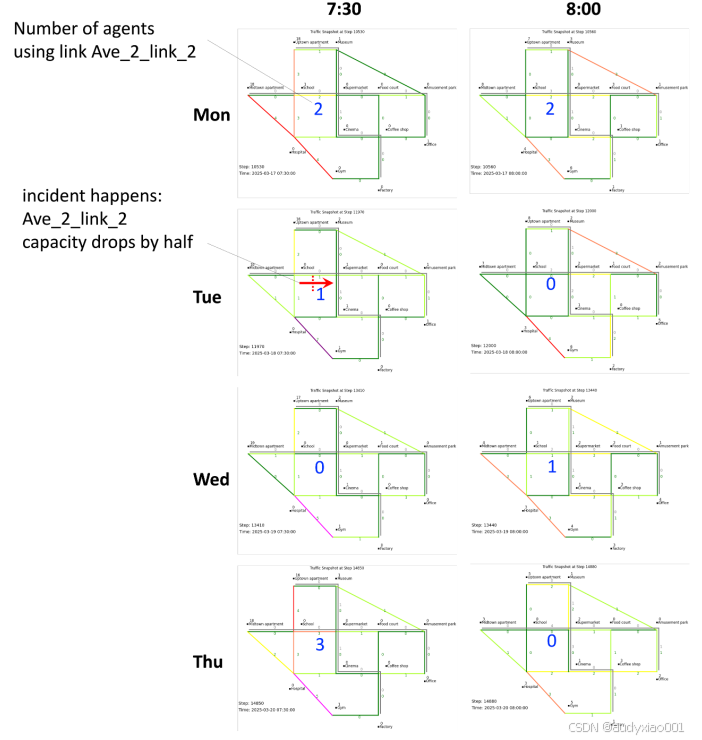
图7 事故路段流量变化
四、总结
本研究针对传统城市出行仿真行为刻板、适应性弱、缺乏学习与社交交互等瓶颈,提出基于生成式智能体的GATSim仿真框架,将大语言模型认知能力与交通仿真深度融合,构建了包含分层记忆、动态规划、实时响应与多尺度反思的专用智能体认知系统。实验结果表明,GATSim智能体在微观出行决策上达到与人类标注者可比的真实度,宏观层面可自涌现出高峰演化、拥堵收敛、突发事件响应等符合现实的交通规律,有效实现了从规则驱动到智能驱动的出行仿真范式升级。该框架可为交通规划、政策评估、路网优化与应急管理提供更真实、灵活且高解释性的仿真支撑。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 7
7 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)