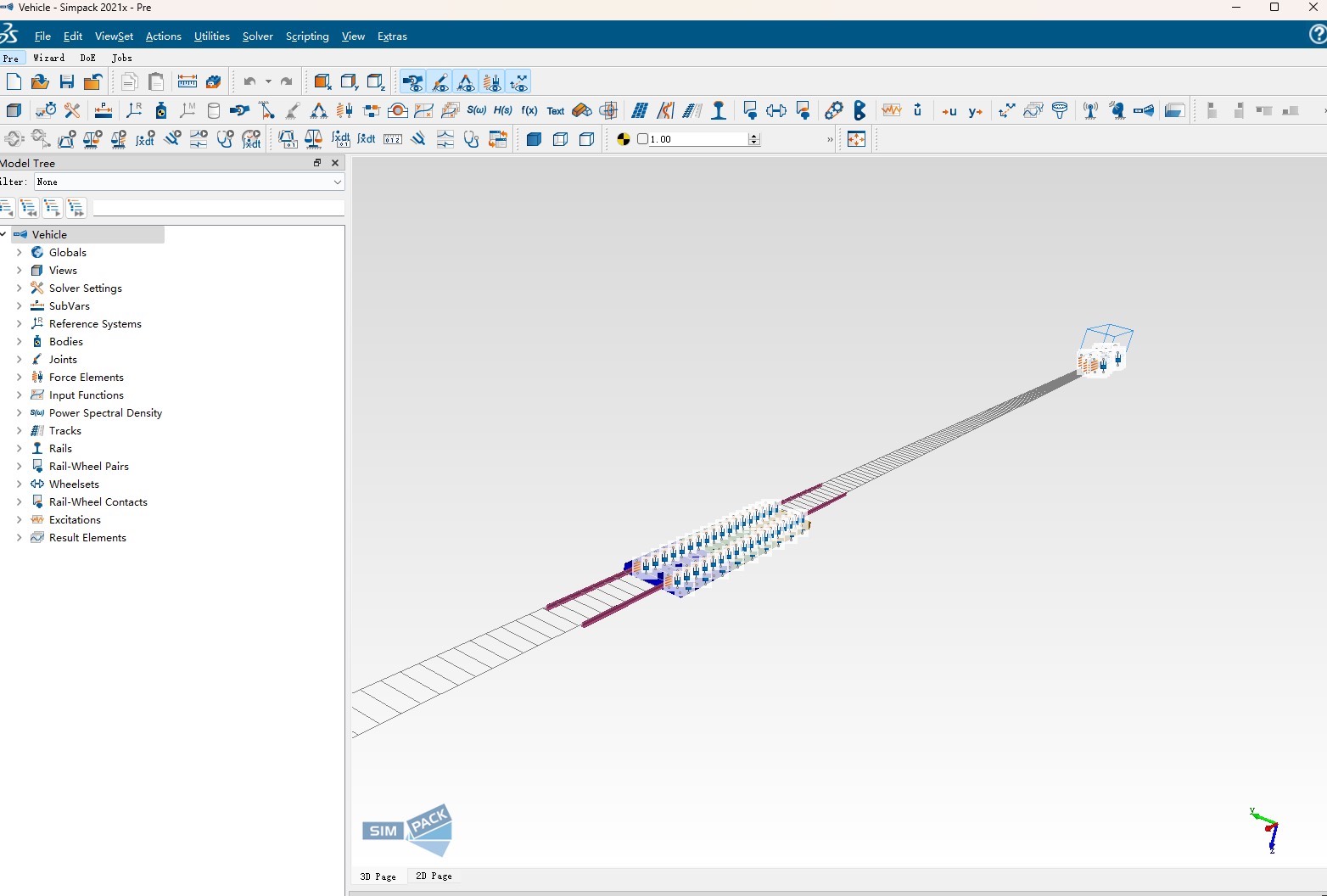
Simpack车桥耦合模型系列教程:从软件安装到刚柔耦合实战解析,助力高效学习交流
Simpack车桥耦合模型系列教学视频 车-轨-桥耦合教程 刚-柔耦合教程 可单独 主要涉及软件:ABAQUSSIMPACK 都是学生,内容绝对超值,为大家节省学习时间,后期大家可以共同交流。 :1.SIMPCK2021+SIMPACK2021x的安装包安装步骤 2.SIMPACK学习资料
程序概述
本MATLAB程序实现了一套完整的车辆-无砟轨道-桥梁耦合系统动力学分析工具,采用Newmark-β数值积分方法求解系统的动力响应。程序专门针对轨道交通工程中车桥耦合振动问题开发,能够模拟考虑轨道不平顺条件下的系统动力学行为。
核心文件功能详解
1. 有限元矩阵构建模块
beamelementk.m - 单元刚度矩阵生成
function y = beamelementk(B,a)
% 输入:B = EI/L³,a = 单元长度
% 输出:4×4梁单元刚度矩阵基于欧拉-伯努利梁理论,生成标准的梁单元刚度矩阵。
Simpack车桥耦合模型系列教学视频 车-轨-桥耦合教程 刚-柔耦合教程 可单独 主要涉及软件:ABAQUSSIMPACK 都是学生,内容绝对超值,为大家节省学习时间,后期大家可以共同交流。 :1.SIMPCK2021+SIMPACK2021x的安装包安装步骤 2.SIMPACK学习资料
beamelementmass.m - 单元质量矩阵生成
function y = beamelementmass(A,a)
% 输入:A = ρA/420,a = 单元长度
% 输出:4×4梁单元一致质量矩阵beamassemblek.m / beamassemblemass.m - 整体矩阵组装
- 将单元矩阵按节点自由度位置组装到整体矩阵中
- 采用
2i-1, 2i, 2j-1, 2j的编号规则(横向位移、转角)
2. 系统矩阵集成模块
zujik.m / zujim.m - 循环组装辅助函数
function y = zujik(kk,n,K1)
% 通过循环将单元矩阵组装到整体矩阵3. 车辆轨道相互作用模块
position.m - 车轮实时位置追踪
function [XCOOR,NPOINL,DISTL] = position(nn,l1,l2,h,vv,a)
% 计算每个时间步:
% XCOOR - 四个车轮的绝对坐标
% NPOINL - 车轮所在单元编号
% DISTL - 距单元左端距离shapeb.m - 梁单元形函数计算
function [N] = shapeb(a,DISTL,nn)
% 计算Hermite立方形函数:
% N(:,1) - 左端位移形函数
% N(:,2) - 左端转角形函数
% N(:,3) - 右端位移形函数
% N(:,4) - 右端转角形函数4. 轮轨接触力计算模块
pf1.m - 非线性接触力计算
function [PF1] = pf1(n,NN,NP,TY,ZZ1,G)
% 基于Hertz接触理论:
% 轮轨相对位移 = 车轮位移 - 轨道位移 - 轨道不平顺
% 接触力 = (相对位移/G)^1.5 (当相对位移>0)
% 接触力 = 0 (当相对位移≤0,轮轨分离)pp.m - 接触力向整体荷载向量映射
function [PP] = pp(n,NP,NN,PF1)
% 将轮轨接触力通过形函数分配到相应节点
% 同时考虑作用在车轮上的反力5. 动力学求解核心模块
newmarkf.m - Newmark-β法求解器
function [PFORCE,Z,V,J] = newmarkf(KJ,M,C,P0,N,NPOINL,YT,nn)
% 参数:γ=0.5, β=0.25*(0.5+γ)²
% 有效刚度矩阵:KVV = KJ + c0*M + c1*C
% 迭代求解确保轮轨接触收敛系统建模特点
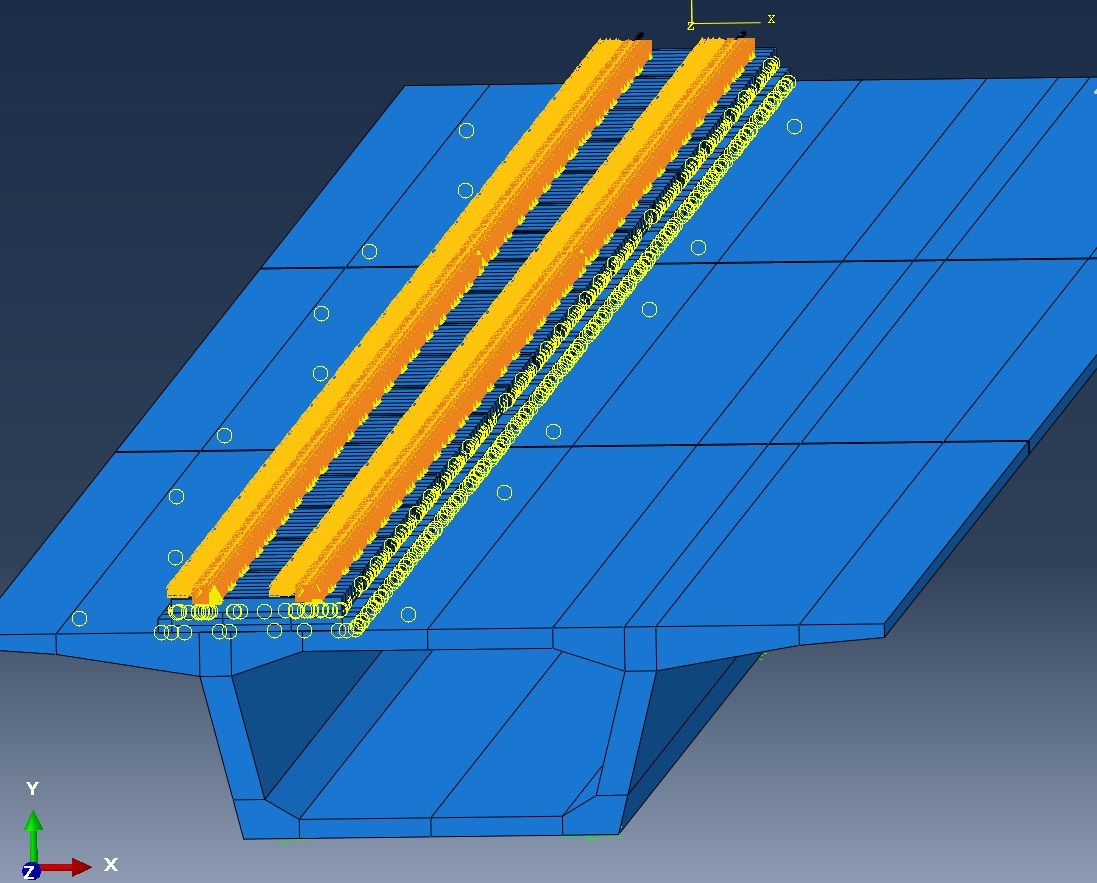
物理系统构成
- 轨道系统:离散为多个梁单元
- 桥梁系统:同样采用梁单元离散
- 车辆系统:10自由度模型(4个车轮、2个转向架、1个车体)
- 耦合连接:弹簧-阻尼元件连接各子系统
矩阵结构
系统总自由度:6n + 10
- 轨道:
2n个自由度 - 无砟轨道板:
2n个自由度 - 桥梁:
2n个自由度 - 车辆:10个自由度
关键技术特征
1. 轨道不平顺处理
% 导入实测不平顺数据
num = xlsread('bps');
bps = (1e-3)*num;
% 人工生成不平顺段
for jj = step:step+1200
bps(jj,1) = 0.0032*sin(((jj-step)/1200)*(pi/2));
end2. 瑞利阻尼模型
% 桥梁子系统阻尼
aa = (2*Zb*w1*w2)/(w1+w2);
bb = (2*Zb)/(w1+w2);
CB3 = aa*nnb + bb*kk4; % 比例阻尼矩阵3. 迭代收敛控制
while(SDZ > 10^(-8) || SDP > 0.01)
% 位移收敛准则:SDZ < 1e-8
% 接触力收敛准则:SDP < 0.01
end输入输出参数
主要输入参数
- 轨道参数:单元长度、材料属性、截面特性
- 车辆参数:质量、转动惯量、悬挂刚度阻尼
- 耦合参数:层间刚度阻尼系数
- 运行条件:车速、轨道不平顺、积分步长
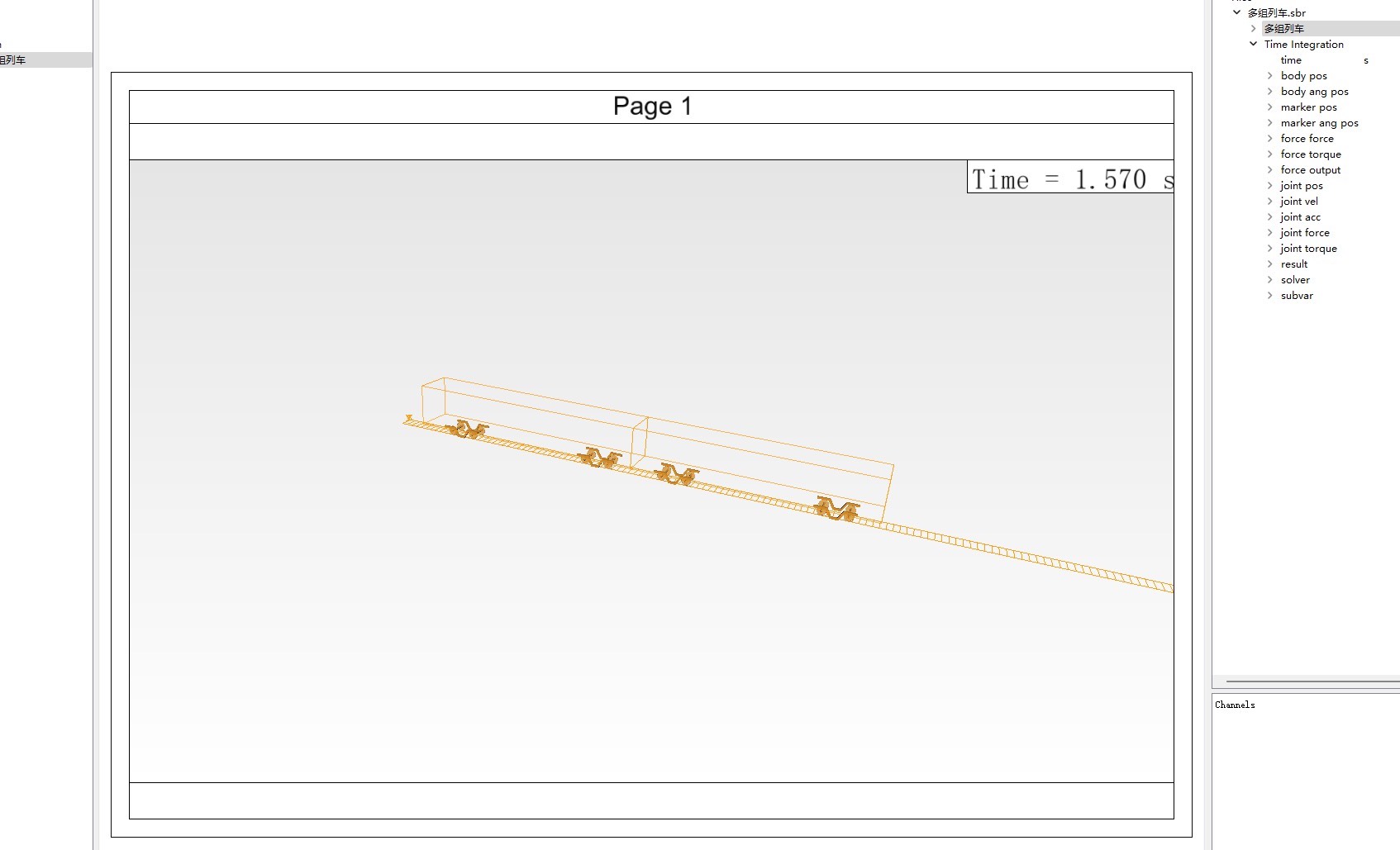
输出结果
Z- 系统位移时程(所有自由度)V- 系统速度时程J- 系统加速度时程PFORCE- 轮轨接触力时程- 关键位置的最大响应值
工程应用价值
本程序适用于:
- 桥梁动力性能评估
- 轨道不平顺限值研究
- 车辆运行安全性分析
- 耦合系统参数优化
- 轨道交通减振降噪研究
程序通过详细的物理建模和稳健的数值算法,为车桥耦合振动分析提供了可靠的仿真平台。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 2
2 0
0- 0



 已为社区贡献157条内容
已为社区贡献157条内容

所有评论(0)