软考架构师【第十一章】未来信息综合技术
·
11.1信息物理系统技术概述
11.1.1信息物理系统的概念(CPS)
信息物理系统 (Cyber-Physical Systems,CPS)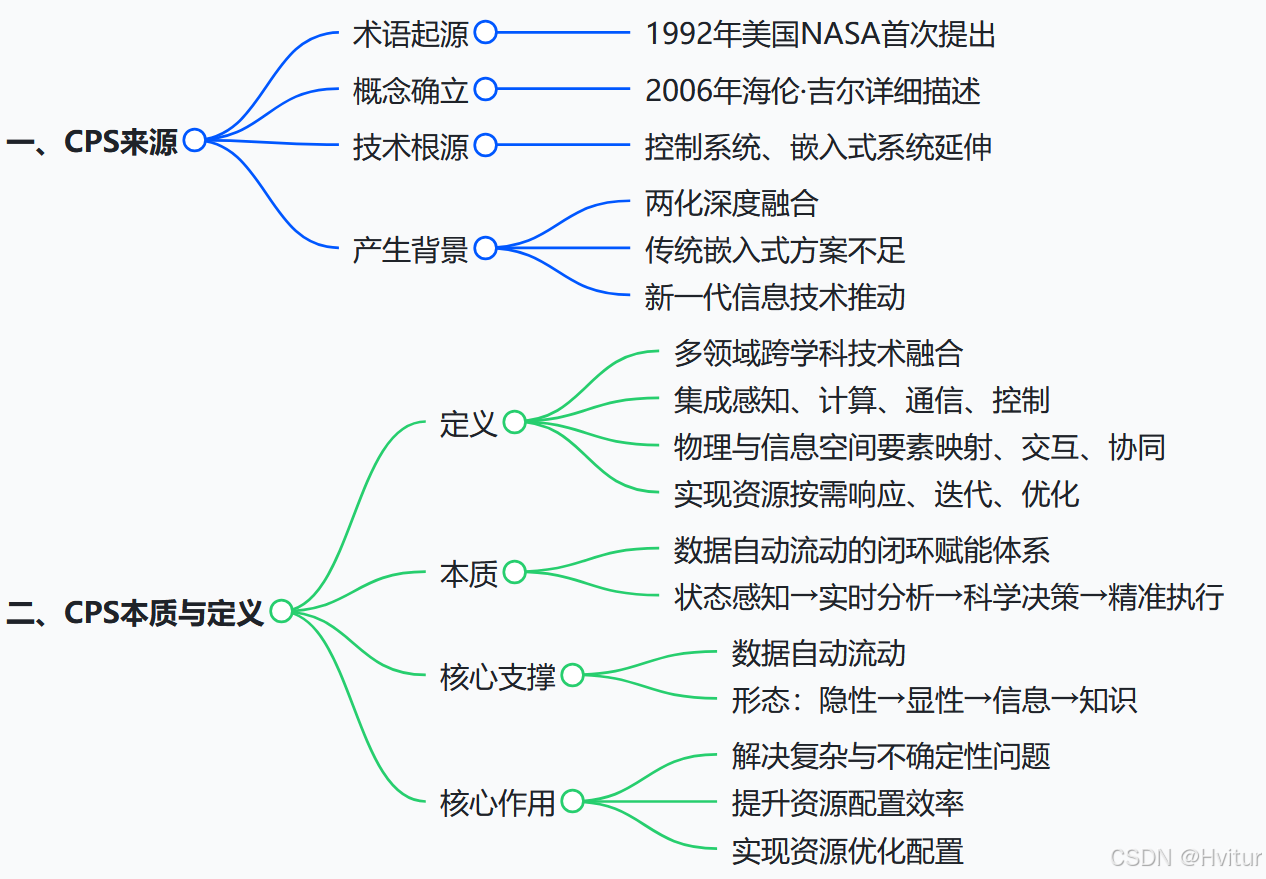
11.1.2CPS的实现
| 层级 | 核心定义 | 主要特点与功能 | 典型示例 |
|---|---|---|---|
| 单元级 CPS | CPS 最小不可分割单元;软件对物理实体实现感知—计算—控制闭环 |
可感知、可计算、可交互、可延展、自决策;基本数据自动流动闭环 | 智能部件、工业机器人、智能机床 |
| 系统级 CPS | 多个单元级 CPS 经工业网络互联形成的局部系统 | 多单元互联互通、互操作;自组织、自配置、自决策、自优化;含边缘网关、协同控制、监控诊断、即插即用等 | 生产线(传送带+机器人+冲压机床) |
| SoS 级 CPS (系统之系统) |
多个系统级 CPS 有机组合形成的全局系统 | 数据汇聚融合、分布式计算、大数据分析、数据服务;全局资产与运营优化;跨系统互操作 | 车间级 CPS、整工厂 CPS、大数据智能服务平台 |
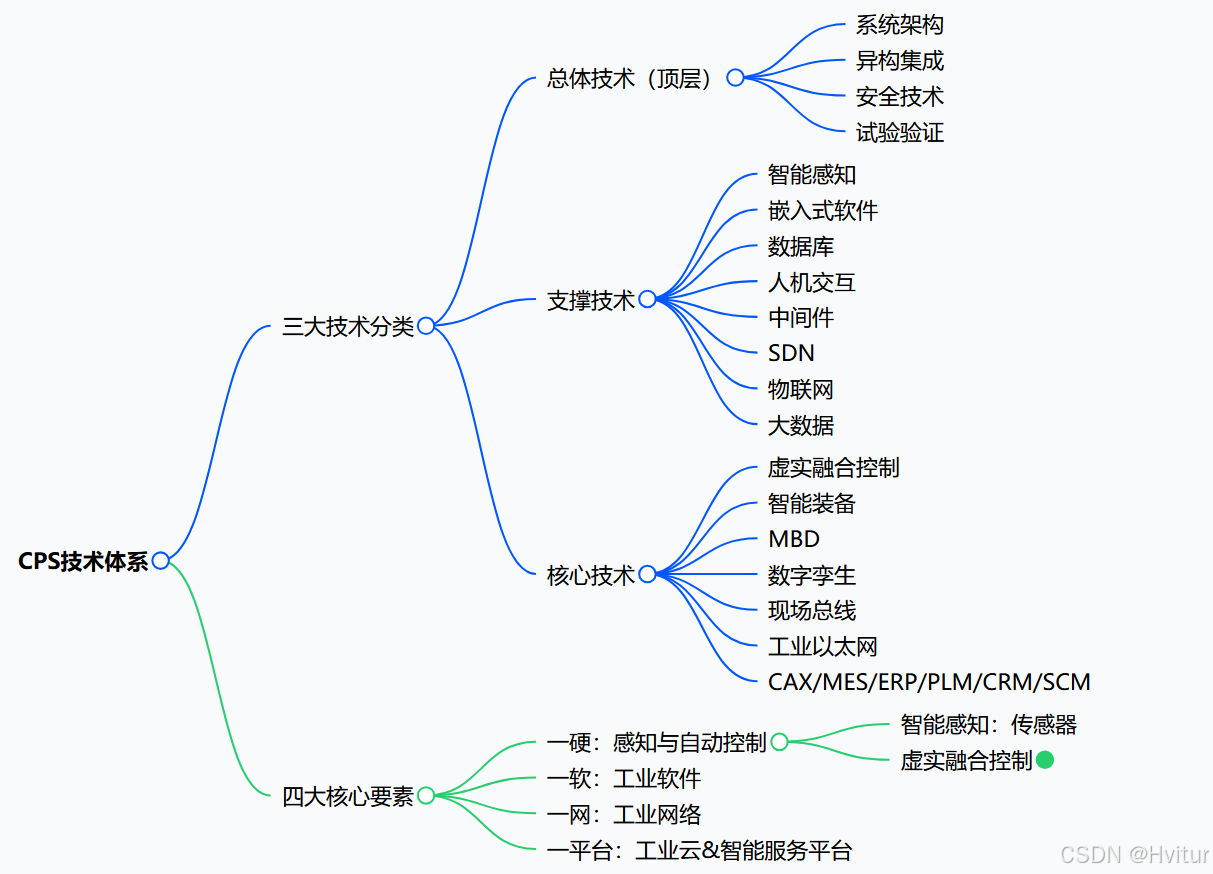
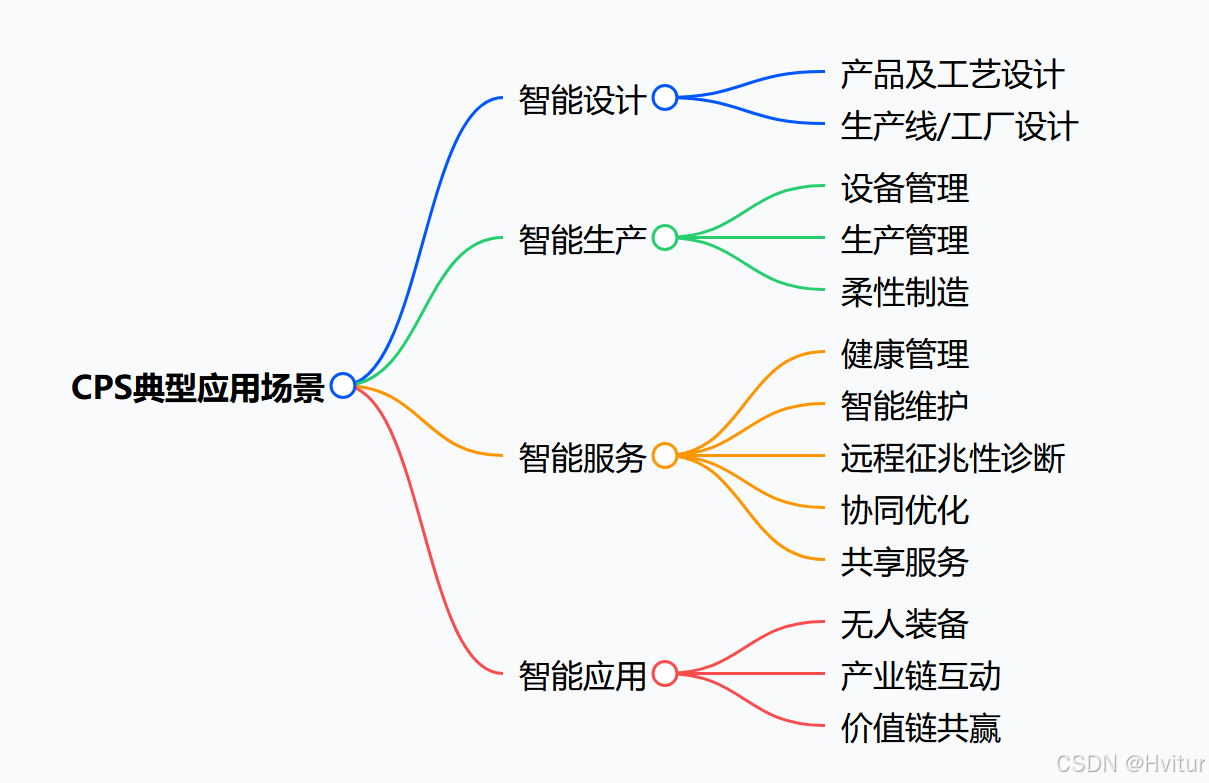
11.1.3信息物理系统的建设和应用
11.2人工智能技术概述
11.2.1人工智能的概念
| 项目 | 原文内容 |
|---|---|
| 人工智能定义 | 人工智能 (Artificial Intelligence, AI) 是利用数字计算机或者数字计算机控制的机器模拟、延伸和扩展人的智能,感知环境、获取知识并使用知识获得最佳结果的理论、方法、技术及应用系统。 |
| 人工智能目标 | 了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器。研究领域包括机器人、自然语言处理、计算机视觉和专家系统等。 |
| 弱人工智能 | 不能真正实现推理和解决问题,表面看似智能,但不真正拥有智能、无自主意识,是面向特定功能的专用智能。目前主流研究均为此类,在语音识别、图像处理、机器翻译等领域接近或超越人类水平。 |
| 强人工智能 | 能真正思维、有知觉和自我意识的智能机器,分为类人与非类人两类,也叫通用人工智能。技术挑战性极大,当前鲜有进展,专家认为至少未来几十年难以实现。 |
11.2.3人工智能关键技术
| 序号 | 技术名称 | 原文说明 |
|---|---|---|
| 1 | 自然语言处理(NLP) | 计算机科学与语言学交叉学科,AI重要方向;研究人与计算机用自然语言通信,包含机器翻译、语义理解、问答系统等。 |
| 2 | 计算机视觉 | 模仿人类视觉系统,让计算机具备提取、处理、理解图像及序列能力;用于自动驾驶、机器人、医疗等;深度学习形成端到端算法。 |
| 3 | 知识图谱 | 结构化语义知识库,由节点和边组成的图结构,描述概念及关系;用于反欺诈、搜索引擎、精准营销等。 |
| 4 | 人机交互(HCI) | 研究人与计算机间信息交换,含输入输出双向交互;交叉认知心理学、人机工程、VR等;包括语音、情感、体感、脑机交互等。 |
| 5 | 虚拟现实/增强现实(VR/AR) | 以计算机为核心的视听技术,生成高度近似真实的数字化环境;用户通过装备交互,获得近似真实的感受与体验。 |
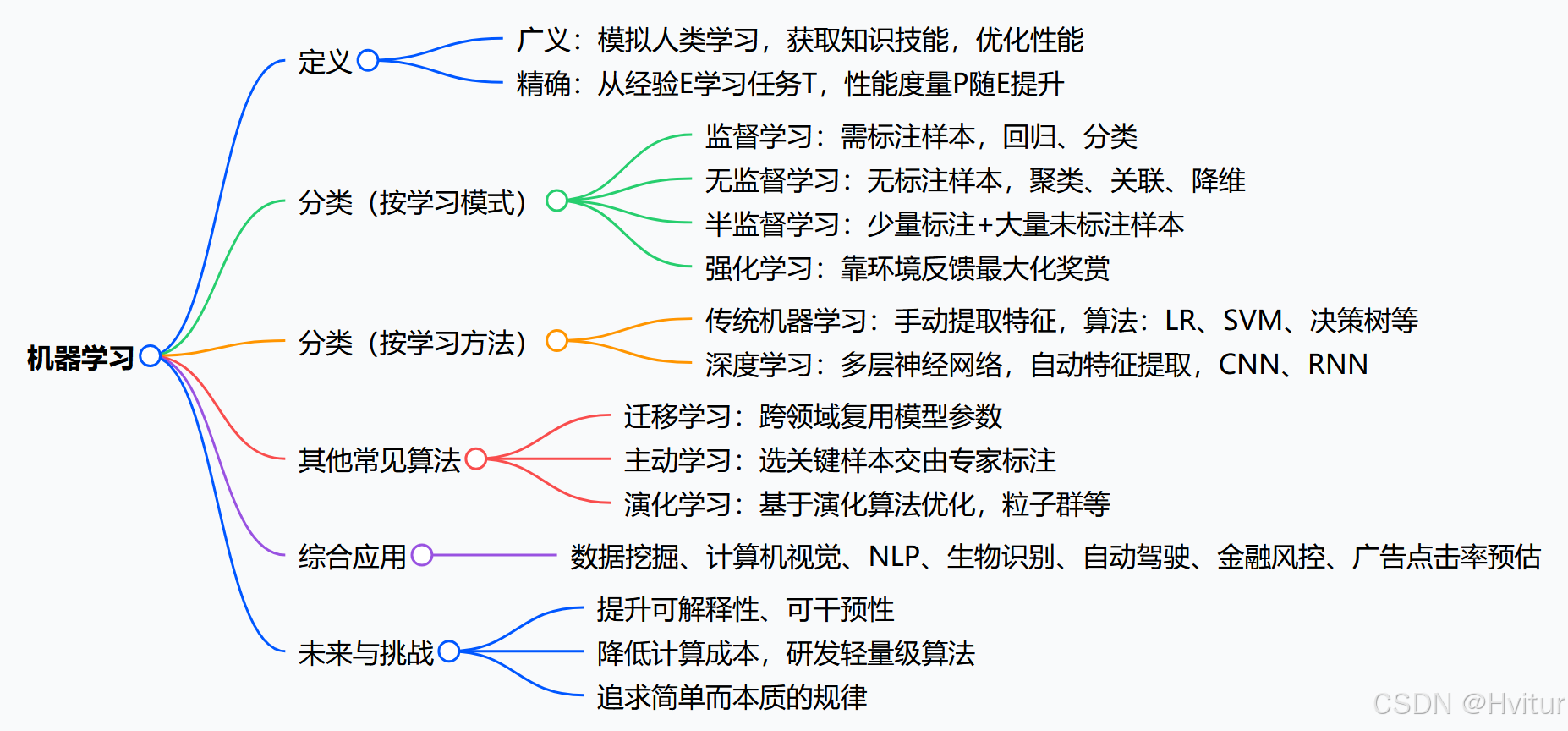
| 6 | 机器学习(ML) | AI核心领域,多学科交叉;以数据为基础,从样本找规律并预测未来数据;应用于数据挖掘、计算机视觉、NLP、生物特征识别等。 |
11.3机器人技术概述
11.3.1 机器人的概念
11.3.2机器人的定义和发展历程
| 阶段 | 名称 | 核心特点 | 典型代表/说明 |
|---|---|---|---|
| 第一代 | 示教再现型机器人 | 通过示教存储程序,工作时重复再现动作;无环境感知能力 | 1962年PUMA机器人;汽车点焊机器人 |
| 第二代 | 感觉型机器人 | 具备力觉、触觉、视觉、听觉等感知能力,可识别工件形状、大小、颜色 | 20世纪70年代后期开始发展 |
| 第三代 | 智能型机器人 | 搭载多传感器,可逻辑推理、判断决策,在变化环境中自主决定行为 | 20世纪90年代以来发展 |
11.3.3机器人4.0的核心技术
| 序号 | 核心技术 | 核心内容 |
|---|---|---|
| 1 | 云-边-端的无缝协同计算 | 端:负责实时操作;边缘:处理数据、实现协同共享;云:高性能计算与知识存储。依托5G与边缘计算降低延迟,支持动态任务迁移,面向大规模机器人协同。 |
| 2 | 持续学习与协同学习 | 从监督学习转向持续自主学习:小样本建立基础→自主采集数据并标注→自迭代优化模型。通过云端大数据实现机器人间数据共享,提升学习速度与精度。 |
| 3 | 知识图谱 | 需动态、个性化知识,与感知/决策深度结合;知识分布在端-边-云并可共享,支撑场景理解与模式挖掘,实现自适应感知与持续学习。 |
| 4 | 场景自适应 | 基于三维语义理解,观察人/物变化并预测事件,调整行动模式。依托云-边-端知识共享与云端模拟预演,实现“感知-认知-行动”,更智能人性化。 |
| 5 | 数据安全 | 保护视觉、位置、语音等隐私数据;建立端到端传输与服务器存储安全机制;端、边、云采用不同安全策略,严控授权访问,减少敏感数据上云。 |
11.3.4机器人的分类
11.4边缘计算概述
11.4.1边缘计算概念
边缘计算将数据的处理、应用程序的运行甚至一些功能服务的实现,由网络中心下放到网络边缘的节点上。
在网络边缘侧的智能网关上就近采集并且处理数据,不需要将大量未处理的原生数据上传到远处的大数据平台。
11.4.2边缘计算的定义
| 定义来源 | 核心定义 | 要点说明 |
|---|---|---|
| 边缘计算产业联盟(ECC) | 边缘计算是云计算在数据中心之外汇聚节点的延伸和演进,包括云边缘、边缘云、云化网关三类形态;以“边云协同”和“边缘智能”为核心能力 | 1. 三类形态:云边缘、边缘云、云化网关 2. 软件:云理念、云架构、云技术 3. 硬件:支持鲲鹏、ARM、X86、GPU、NPU、FPGA等异构计算 |
| ECC - 云边缘 | 云服务在边缘侧的延伸,逻辑上仍是云服务,依赖云协同 | 华为IEF、阿里云Link Edge、AWS Greengrass |
| ECC - 边缘云 | 在边缘构建小规模云服务,集中云负责管理调度 | MEC、CDN、华为IEC |
| ECC - 云化网关 | 用云化技术重构网关,提供协议转换与边缘能力,云端统一管控 | 边缘协议转换、接口适配、节点调度 |
| OpenStack社区 | 在网络边缘侧为开发者和服务商提供云服务与IT环境;在靠近数据输入或用户的地方提供计算、存储、网络带宽 | 由NASA与Rackspace发起 |
| ISO/IEC JTC1/SC38 | 一种将主要处理和数据存储放在网络边缘节点的分布式计算形式 | 突出分布式、边缘存储与边缘处理 |
| ECC(标准定义) | 在靠近物或数据源头的网络边缘侧,融合网络、计算、存储、应用核心能力的开放平台,就近提供边缘智能服务 | 满足:敏捷连接、实时业务、数据优化、应用智能、安全与隐私保护 |
| ETSI(欧洲电信标准协会) | 在移动网络边缘提供IT服务环境和计算能力,靠近移动用户,减少时延、提升体验 | 侧重移动通信场景、低时延、用户体验 |
11.4.3边缘计算的特点
| 序号 | 特点 | 原文说明 |
|---|---|---|
| 1 | 联接性 | 联接性是边缘计算的基础。所联接物理对象的多样性及应用场景的多样性,需要边缘计算具备丰富的联接功能,如各种网络接口、网络协议、网络拓扑、网络部署与配置、网络管理与维护。联接性需要充分借鉴吸收网络领域先进研究成果,如 TSN、SDN、NFV、Network as a Service、WLAN、NB-IoT、5G 等,同时还要考虑与现有各种工业总线的互联互通。 |
| 2 | 数据第一入口 | 边缘计算作为物理世界到数字世界的桥梁,是数据的第一入口,拥有大量、实时、完整的数据,可基于数据全生命周期进行管理与价值创造,将更好的支撑预测性维护、资产效率与管理等创新应用;同时,作为数据第一入口,边缘计算也面临数据实时性、确定性、多样性等挑战。 |
| 3 | 约束性 | 边缘计算产品需适配工业现场相对恶劣的工作条件与运行环境,如防电磁、防尘、防爆、抗振动、抗电流/电压波动等。在工业互联场景下,对边缘计算设备的功耗、成本、空间也有较高的要求。边缘计算产品需要考虑通过软硬件集成与优化,以适配各种条件约束,支撑行业数字化多样性场景。 |
| 4 | 分布性 | 边缘计算实际部署天然具备分布式特征。这要求边缘计算支持分布式计算与存储、实现分布式资源的动态调度与统一管理、支撑分布式智能、具备分布式安全等能力。 |
11.4.4边云协同
| 分类 | 内容 | 原文说明 |
|---|---|---|
| 核心定位对比 | 云计算 | 擅长全局性、非实时、长周期的大数据处理与分析,适用于长周期维护、业务决策支撑。 |
| 边缘计算 | 适用局部性、实时、短周期数据处理与分析,支撑本地业务实时智能化决策与执行。 | |
| 关系 | 非替代关系,而是互补协同;边缘采集预处理数据上云,云端下发规则/模型到边缘。 | |
| 边云协同六大能力 | 1. 资源协同 | 边缘提供计算、存储、网络等IaaS资源,本地调度;云端下发资源调度、设备与网络管理策略。 |
| 2. 数据协同 | 边缘负责数据采集、初步处理分析并上传;云端负责海量数据存储、分析与价值挖掘,实现数据全生命周期管理。 | |
| 3. 智能协同 | 边缘侧执行AI模型推理,实现分布式智能;云端集中进行AI模型训练,并下发模型到边缘。 | |
| 4. 应用管理协同 | 边缘负责应用部署、运行及本地应用生命周期管理;云端提供应用开发、测试与全局应用生命周期管理。 | |
| 5. 业务管理协同 | 边缘提供模块化、微服务化应用/数字孪生等实例;云端按客户需求实现业务编排。 | |
| 6. 服务协同 | 边缘按云端策略提供部分ECSaaS服务;云端制定SaaS服务分布策略,协同实现按需服务。 |
11.5数字孪生体技术概述
11.5.2数字孪生体的定义
数字孪生体是现有或将有的物理实体对象的数字模型,通过实测、仿真和数据分析来实时感知、诊断、预物理实体对象的状态,通过优化和指令来调控物理实体对象的行为,通过相关数字模型间的相互学习来进化自身,同时改进利益相关方在物理实体对象生命周期内的决策。
| 序号 | 使用场合与含义 | 原文说明 |
|---|---|---|
| (1) | 技术体系与综合影响 | Digital Twin 背后的技术体系、跨学科工程领域,以及其带来的商业、经济、社会影响体系,如“数字孪生体时代”。 |
| (2) | 数字化模型抽象类型/实例 | 物理实体对象的数字化孪生模型的抽象类型或实例,分为:数字孪生原型体、数字孪生实例体、数字孪生聚合体。 |
| (3) | 具体场景的孪生模型 | 特定场景下物理实体(产品、工厂、城市、产业、战场等)的数字化孪生模型;可作形容词使用,如数字孪生制造、数字孪生城市。 |
| (4) | 数字孪生系统 | 由数字孪生体、对应物理实体及相关使能对象共同构成的系统,多用于架构设计、实现等强调虚实并重的场合。 |
11.5.3数字孪生体的关键技术
| 分类 | 技术名称 | 核心说明 |
|---|---|---|
| 三项核心技术 | 建模 | 对物理实体进行数字化模型构建,是数字孪生的源头与“数化”核心;采用需求指标、生存期阶段、空间尺度三维建模体系;多视图模型需数字线程协同。 |
| 仿真 | 与建模伴生,用于验证模型正确性;通过软件模拟物理世界,准确反映实体特性,保障孪生体与物理实体闭环。 | |
| 数字线程 | 基于数据融合,实现多视图、多阶段模型协同与数据贯通。 | |
| 顶层框架技术 | 系统工程 & MBSE | 统领建模、仿真、数字线程,作为数字孪生的顶层框架。 |
| 底层伴生技术 | 物联网 | 支撑数据采集与物理实体连接,是数字孪生的底层基础。 |
| 外围使能技术 | 云计算、机器学习、大数据、区块链 | 为数字孪生提供计算、分析、智能、安全等支撑能力。 |
| 其他相关技术 | VR/AR/MR、雾计算、边缘计算等 | 参与数字孪生构建,增强交互、分布式处理与实时性。 |
11.6 云计算和大数据技术概述
11.6.1云计算技术概述
11.6.2大数据技术概述
大数据是指其大小或复杂性无法通过现有常用的软件工具,以合理的成本并在可接受的时限内对其进行捕获、管理和处理的数据集。这些困难包括数据的收入、存储、搜索、共享、分析和可视化。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 4
4 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)