智元AI发布周DAY1-5简要总结
总结
day1发布AgiBotWorld2026数据集
day2发布Genie_sim,根据提示词生成场景(但是演示中没用哈哈)
day3GO -2 具身基座大模型
day4发布GE-Sim 2.0 无限生成场景(问:跟day2有什么区别)
day5发布Genie studio,重建孪生场景,建立并验证工作流。
(数据集+训练)+具身模型+(场景生成器1.0/2.0+训练)+孪生场景工作流验证 = 一键部署生产落地
day5
1、发布了genie studio复杂工作流仿真。
具体功能页面:Genie studio官方地址
主要功能:位姿调整(位控、力控)、RL模型推理、VLA模型推理、末端执行、高精度导航。可以拖动,执行工作流。可以拖动算子,作为完整的工作流。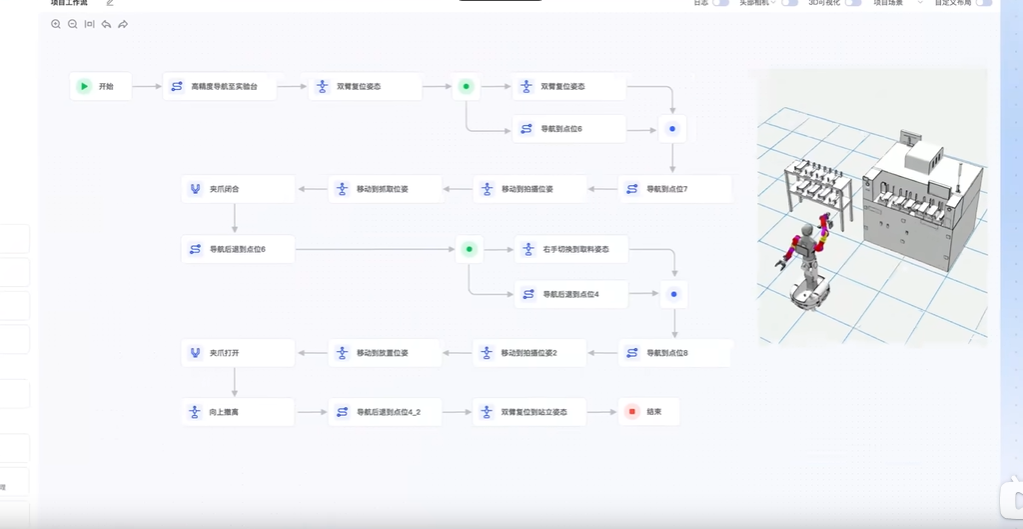
问题:这个仿真场景的编辑器是如何实现的。看招聘需求是基于Mujoco、isaac、isaac、Newton、P有Bullet、Gazebo、Drake,使用URDF/SDF仿真模型进行二开。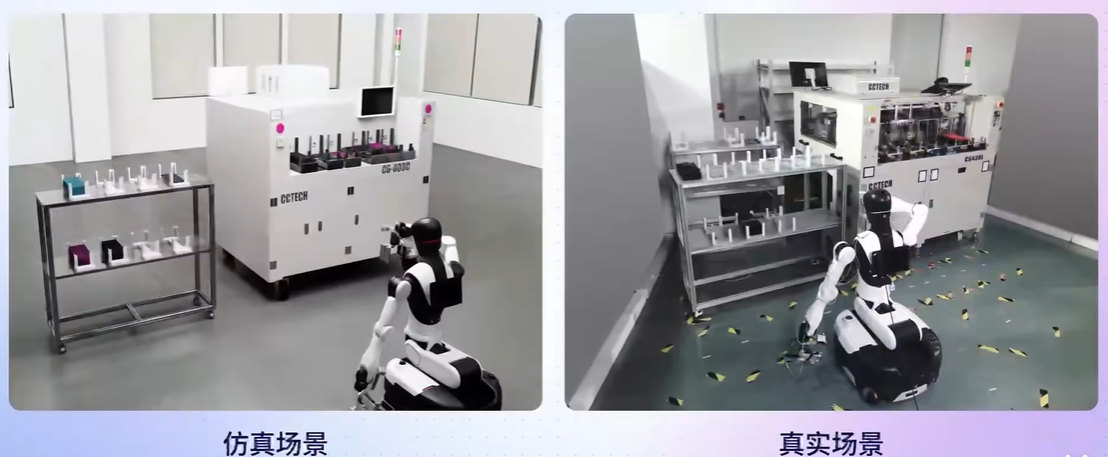
问了豆师傅,确定答案:
Genie Sim 3.0 一站式机器人仿真平台;
技术路线:
1、平台原生基于 NVIDIA Isaac Sim 机器人仿真引擎二次深度定制;
2、高保真数字孪生重建技术路线(图片虚实对齐的核心)
3、针对工业产线、设备环境的毫米级真实场景复刻,采用「激光扫描 + 神经高斯重建 + 视觉生成」融合方案:
3-1:真实场景端采集
用 MetaCam 手持 3D 激光扫描仪,同步采集真实车间的RGB 图像、360° LiDAR 激光点云、厘米级 RTK 空间定位、设备位姿参数,完整捕获产线机柜、货架、工位布局、机械结构的全部几何信息。
3-2:高精度三维重建
深度融合 3D Gaussian Splatting(3D 高斯溅射)神经渲染 + NVIDIA DiFusion 3D 视觉生成技术,把真实采集的点云、图像数据,转化为照片级视觉真实感 + 物理刚体精确匹配的仿真数字资产。
实现效果:真实产线的设备尺寸、空间位姿、碰撞边界、工装结构,在仿真环境里毫米级复刻,也就是你图里左右两图场景布局、设备结构完全一一对应的根源。
3-3:多模态原生虚实对齐
仿真环境原生同步输出 RGB 视觉、深度图、激光雷达点云、机器人 6D 关节位姿数据,和真实机器人相机、传感器输出格式完全同源,从数据源层面抹平虚实视觉差异。
4、LLM 大模型驱动的场景智能生成路线
自然语言指令即可快速生成、修改工业作业场景,把传统 3D 建模的小时级环境搭建,压缩到分钟级;
配套 AgiBot Digital World 大规模物体资产库,内置 6000 + 工业零件、工装、产线设备模板,支持作业场景快速泛化扩展
5、全链路 Sim2Real 虚实迁移核心技术(本次演示的终极目标)
5-1:动作像素级闭环建模
将人形机器人全身 6D 关节位姿、末端执行器行程,与仿真图像像素做精准映射编码,对抓取、对位、设备操作、避障、碰撞约束等所有工业作业动作,做统一的动力学建模。
5-2:零样本虚实迁移机制
仿真环境中训练、验证完成的机器人作业策略,无需真机微调、直接一键部署到真实机器人;官方实测仿真环境与真实真机的任务评测误差<10%,工业抓取场景可实现仿真训练→真机 100% 作业成功率。
5-3:数据闭环飞轮
真机运行的真实作业数据回流仿真平台,反向优化仿真环境物理参数、补充场景样本,持续缩小虚实差距,形成「仿真训练→真机部署→真实数据回流→仿真迭代」的永久进化闭环。
总结:自研仿真器,三维环境重建、环境场景自然语言编辑、虚实对齐。最终sim2real仿真,做到无需现场真机调试,直接搭建仿真流程,一键部署生产
day4
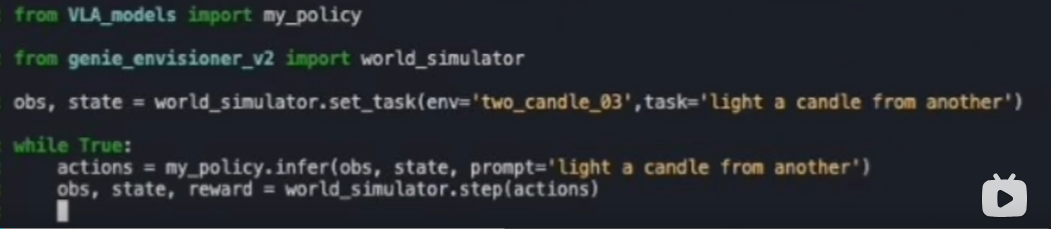
开场先show了代码。import了world_simlator,然后调用函数set_task,让其生成场景:两个蜡烛(two_candle_03),任务描述是:使用一个蜡烛,点燃另一个(light a candle from another)。
然后执行一个循环,在world_simlator的每一步,都输出【强化学习奖励分数】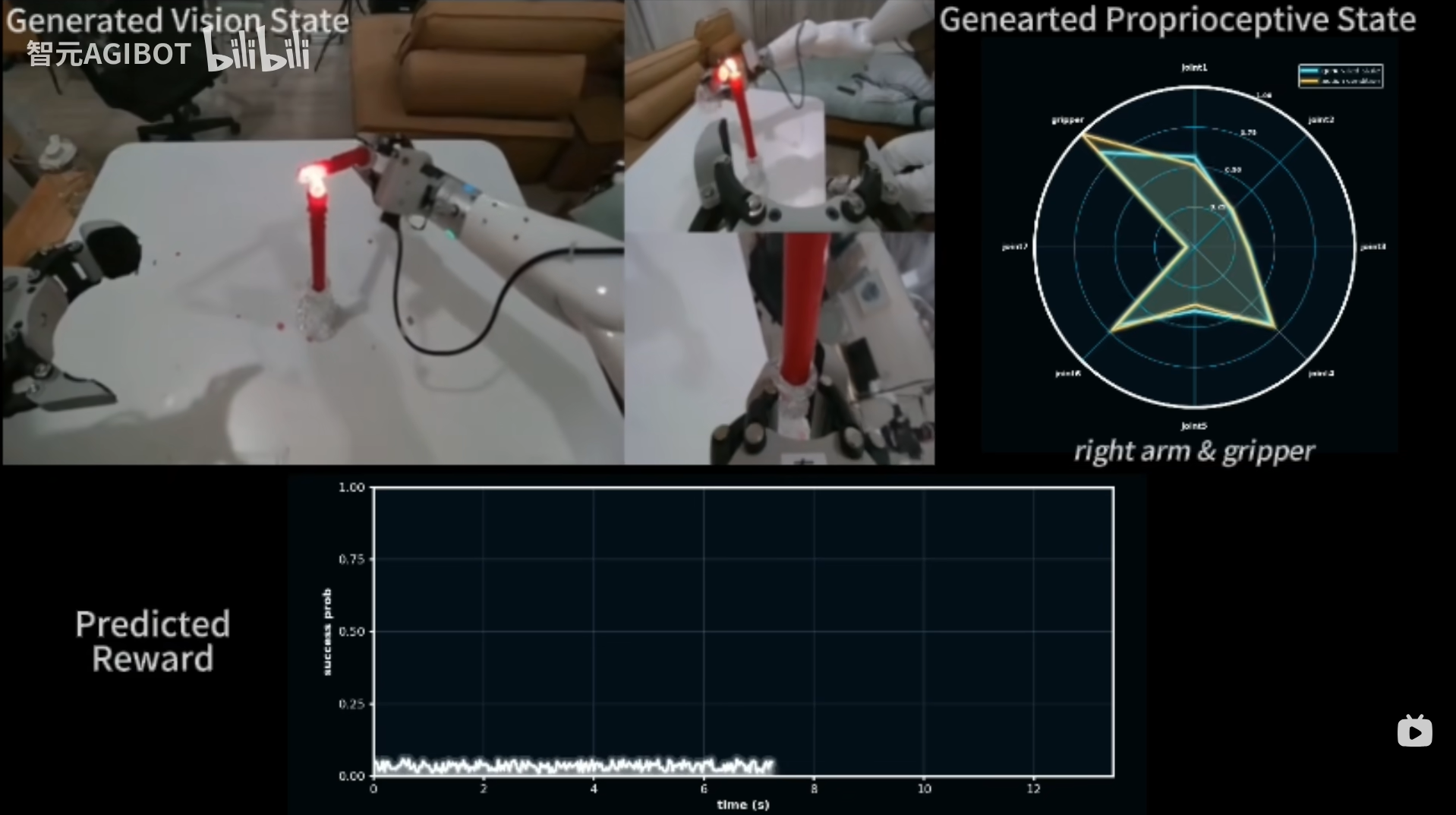
仿真过程中,右上方显示7个joint关节以及夹爪的实时位姿。
下方显示奖励分数。横轴是时间 time (s),纵轴 success prob = 任务成功概率。
总结:无限生成场景、机器人自主 RL 自学通用能力,解决数据荒;内置大模型自动预测奖励,零人工奖励工程
day3
展示了GO -2 具身基座大模型,按照自然语言可以执行指令。但是视频中没有显示太多细节。可以注意到机器人头部跟左右手都有相机。
day2
展示了仿真genie_sim软件
首先展示了软件,展示了场景的分类:room(家庭室内)、office(办公场所)、restaurant(旅馆)、Factory(工厂)、supermarket(超市)、warehouse(仓库)、mansion(豪宅)
接下来展示了提示词(为啥非得是英文):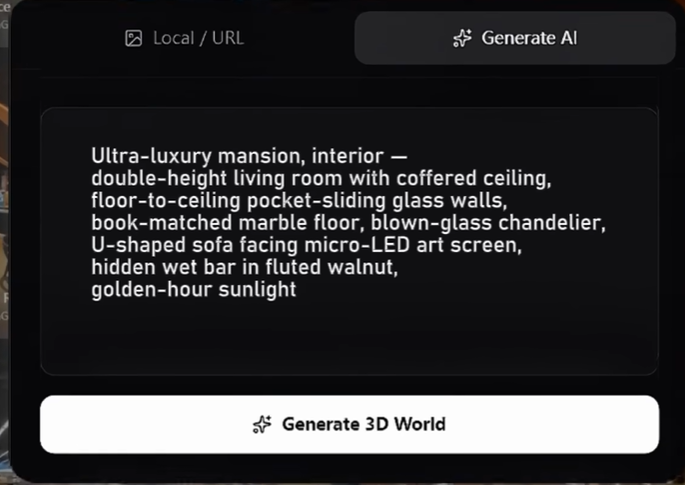
提示词:
Ultra-luxury mansion, interior —double-height living room with coffered ceiling,
floor-to-ceiling pocket-sliding glass walls,book-matched marble floor,
blown-glass chandelier,U-shaped sofa facing micro-LED art screen,
hidden wet bar in fluted walnut,golden-hour sunlight
翻译:
超豪华顶奢宅邸,室内场景
——挑高双层通高客厅,搭配格构镶板吊顶;
落地式隐藏推拉玻璃幕墙;对纹拼接大理石地面;
手工吹制玻璃吊灯;U 型环抱沙发,
正对微型 LED 艺术大屏;竖纹胡桃木饰面内嵌式隐藏水吧台;黄金时刻暖调自然光。
可以看到生成的效果,确实带劲:
然后展示了仿真工具的基本功能(暂时看不懂):
指令跟随、空间理解、操作执行、扰动适应、sim2real
然后展示了与RLinf的并行训练。【RLinf:清华开源、面向机器人 / 具身智能的强化学习统一训练基础设施框架,地址:RLinf官方文档】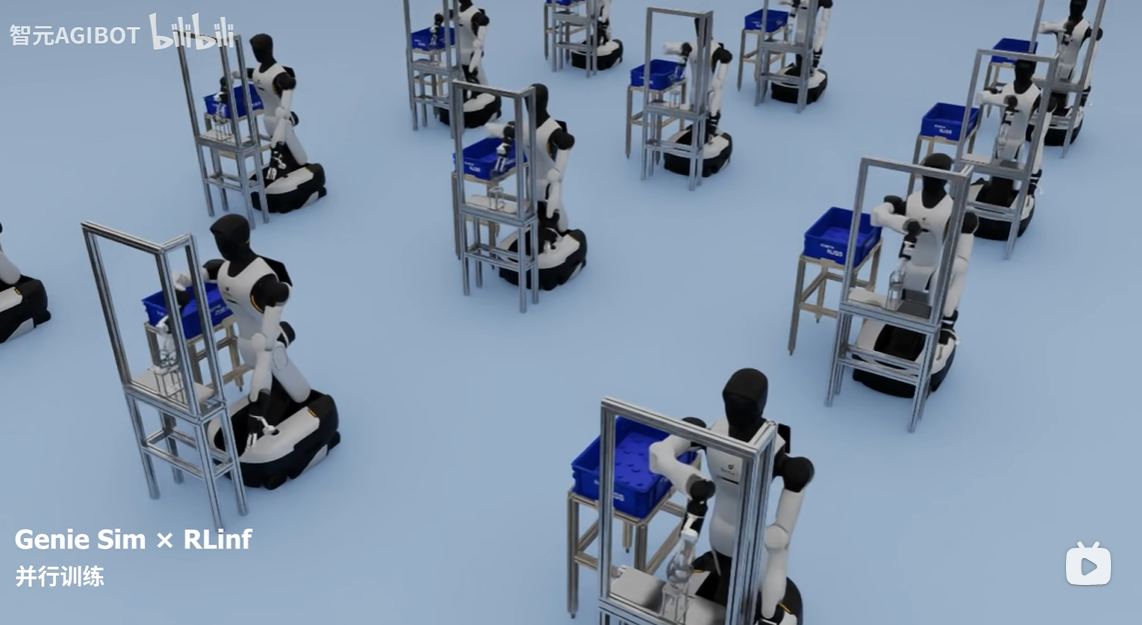
可惜机器人也没在上边生成的豪宅场景里跑,而是在下边的厂房里面仿真。。有点怀疑是不是真的有用??
最后展示了项目的位置:genie_sim
day1
太敷衍了,写的是【开源具身数据集AGIBOT WORLD】,但是没给地址。
还好有万能的豆师傅,数据的官网地址:AGIBOT WORLD官网
Alpha 精简版 9.2w 轨迹,8.5T
Beta 完整版(100w+ 轨迹,43.8T)
最新 2026 新版 AgiBotWorld2026(4 月新开源,含仿真孪生数据)
(含真机采集 + 数字孪生仿真 1:1 场景数据,对你机器人仿真训练直接可用)
GitHub 官方代码仓库(加载脚本、数据解析、GO-1 机器人基座模型、评测 benchmark)
(内含:数据集读取接口、dataloader、预处理代码、训练示例、任务清单、论文引用)
国内高速镜像
最新的2026版中,智元全新迭代,自带数字孪生仿真场景复刻数据,RGB-D、触觉、关节态、力控全量标注,完美对接 Isaac Lab/Mujoco 等仿真环境训练,是你做仿真→真机迁移、RL 训练 benchmark最合适的版本。
然后又写了有【五大主题】,实际视频拍着拍着DAY2-5忘记这茬子事儿了。。
总结流程:
GE-Sim 2.0 世界模型(DAY4)
↓
机器人在AI虚拟世界里自主强化学习,自学点火/抓取/操作等通用技能
↓
通用策略输入 Day3 GO-2 具身基座大模型
↓
导入 Day2 Genie Sim 3.0 真实产线数字孪生环境做精准适配验证
↓
Genie Studio (Day5)零代码打包 → 真机机器人一键部署落地
↓
真机真实作业数据回流 → 反向优化GE-Sim世界模型,持续进化

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)