现代控制理论——专题 基于临界阻尼二阶系统的响应调节器
一、临界阻尼二阶系统的传递函数
1、临界阻尼二阶系统的特点回顾
(1)二阶系统的结构:
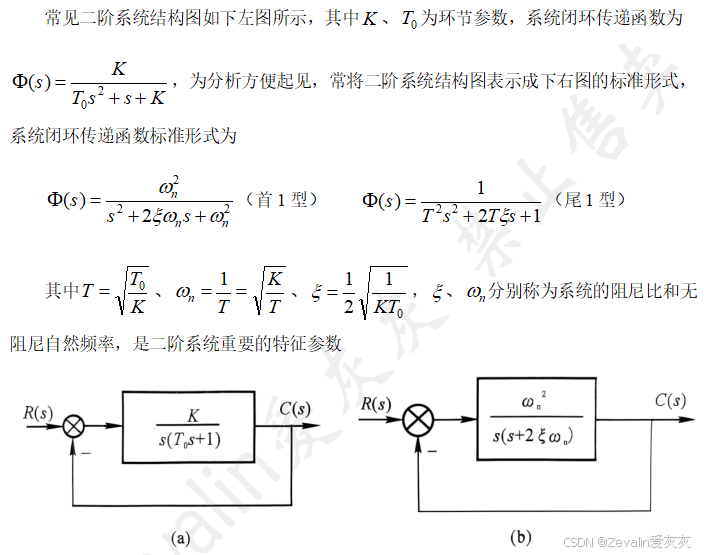
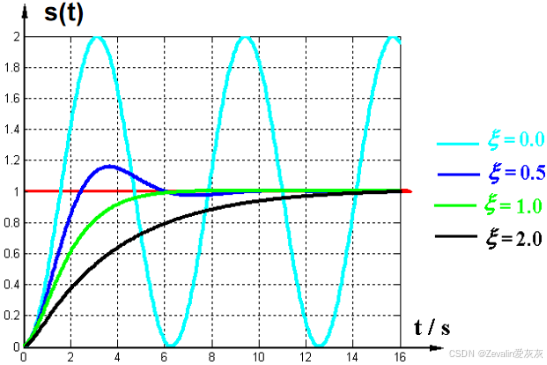
(2)不同阻尼的二阶系统响应:
下图所示的是不同阻尼比的单位阶跃响应,零阻尼将会无限振荡
(3)根据以上的内容回顾,临界阻尼二阶系统有如下特点:
①处于超调和不超调的分界处,阻尼过小,系统容易超调,而阻尼过大,系统响应时间又难以往小调节。
②特征根分布简单,而特征根又决定了系统的响应时间(特征根决定极点位置,极点离原点越远,响应时间越快),所以只需要简单调整特征根的值,就能很容易地调整系统的响应时间。
(4)基于临界阻尼二阶系统的特点,可以设计一个响应调节器,对某些变化剧烈的信号进行响应调节,使其变化平滑。举个可能适用的场景,给一个机械臂的电机发送一个扭矩信号,希望机械臂输出一个很大的扭矩,如果扭矩信号没有平滑,机械臂可能会从静止开始瞬间输出一个很大的扭矩,从用户的角度看,这种产品是难以稳定控制、非常危险的,为了减弱这种“突变”的扭矩,可以对请求的扭矩信号进行响应调节,调节后的扭矩信号更加平缓,就不会出现扭矩突变的情况了。
2、使用MATLAB对理论系统仿真
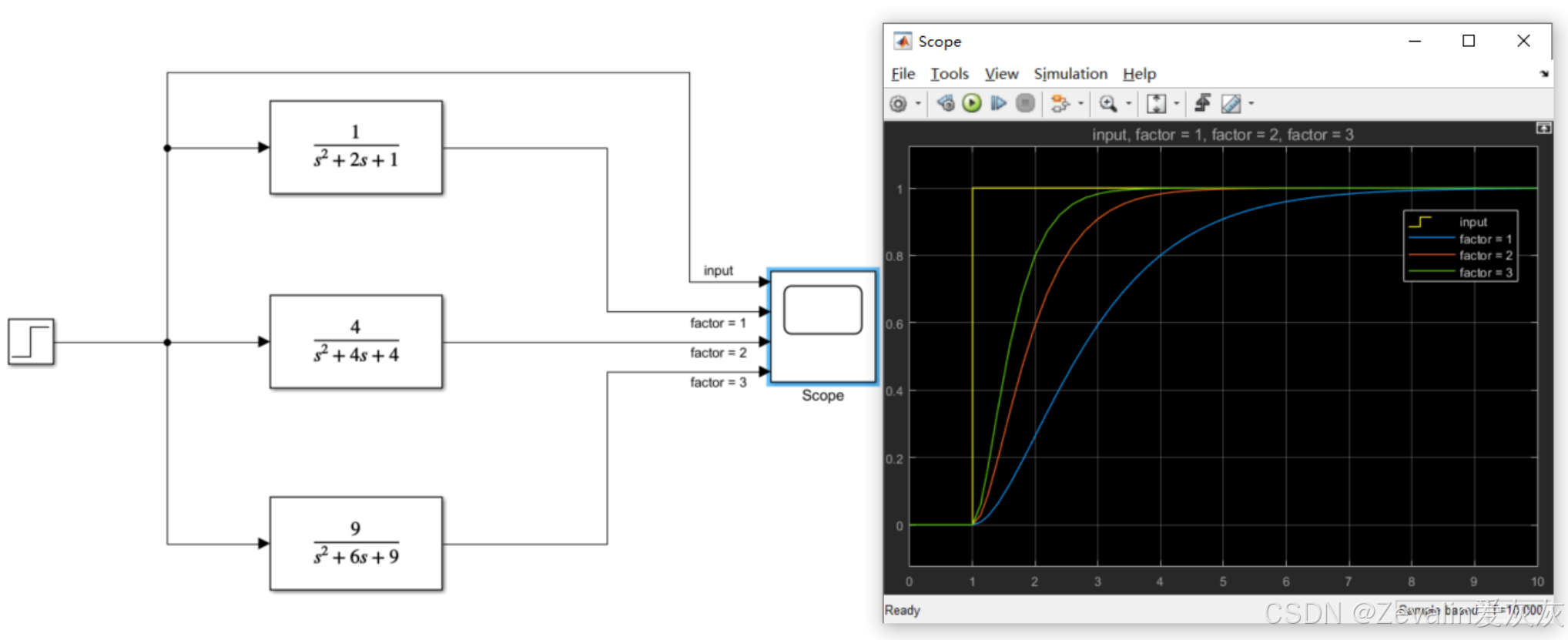
(1)临界阻尼二阶系统的传递函数如下所示。

(2)使用MATLAB Simulink提供的Transfer Fcn传递函数模块搭建若干个临界阻尼二阶系统,其中为可变值,比较不同
对应系统的响应,不难发现,只要调大
就能使系统的响应变快,只要调小
就能使系统的响应变慢。
二、响应调节器系统的状态空间表达式
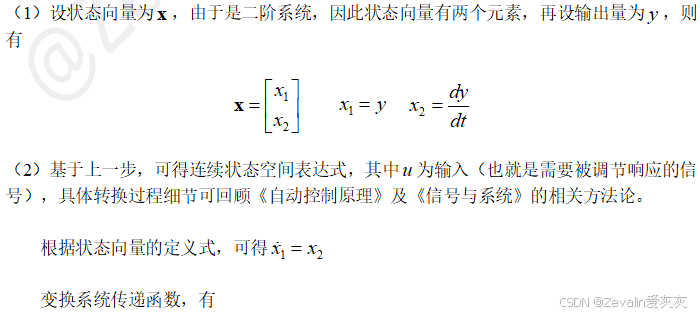
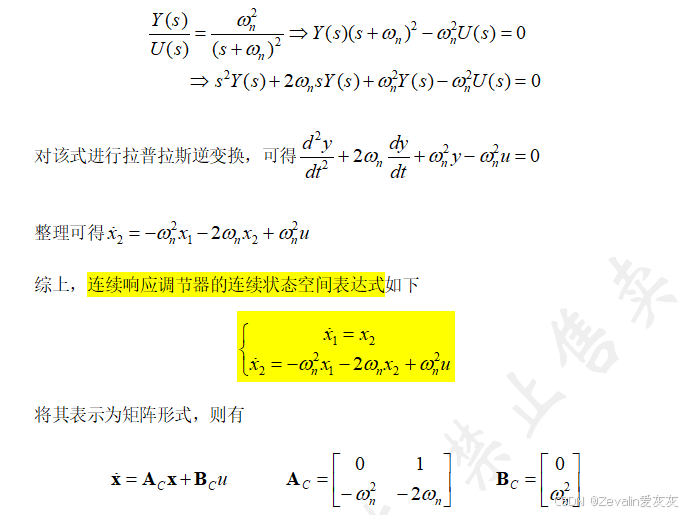
1、连续响应调节器的状态空间模型转化
2、使用前向欧拉法离散化
(1)请求信号往往是通过控制器发出的,而要想算法在控制器中运行,它必须是离散的,因此对于连续的响应调节器,要想应用于软件控制中,必须将其离散化。
(2)设响应调节任务的调度周期为(在操作系统中,将一套待运行的逻辑作为任务,操作系统可以按照一个固定周期将其运行一次,具体可参考《操作系统理论》课程),根据前向欧拉近似,在
时刻,有
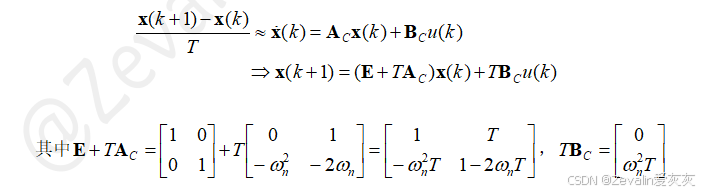
(3)将上一步得到的离散状态空间表达式展开,即可得到状态更新方程。

3、状态变量的意义及注意事项
(1)不难发现,系统的输出方程为,那么状态变量
就相当于在
时刻系统输出的变化量,或者说当前任务周期输出的变化量。
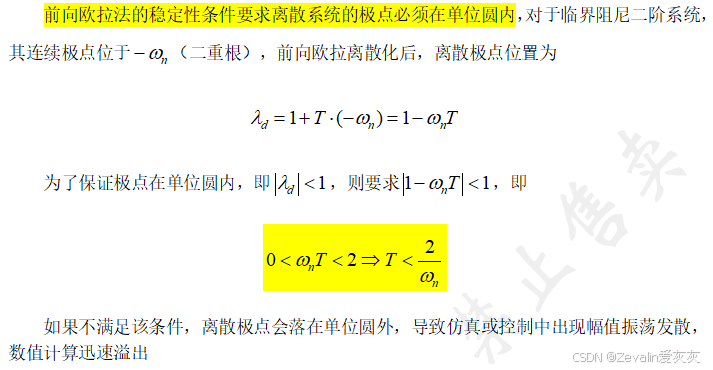
(2)系统稳定性条件:
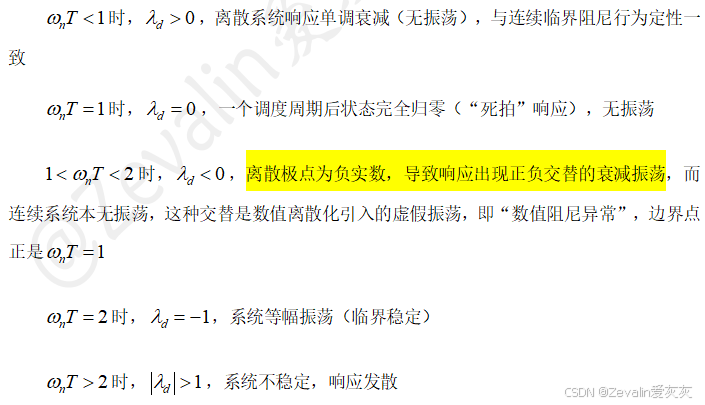
(3)数值阻尼异常的边界:
①不同区间对应的行为:
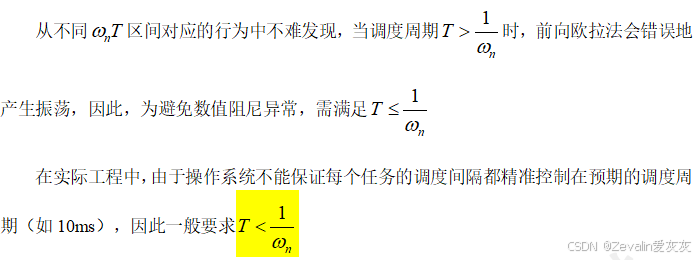
②边界值:
三、离散响应调节器的Simulink模型
1、根据状态空间表达式建模
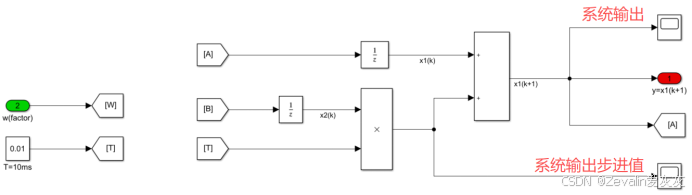
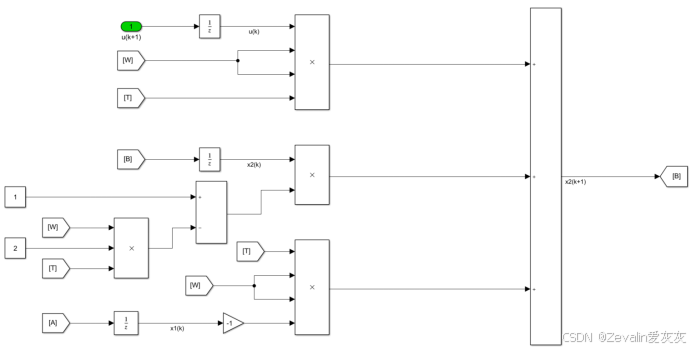
(1)对以下状态空间表达式进行Simulink建模,因为目标是设计可调节的系统,所以不适合直接用Discrete State-Space模块建模,需要用简单的模块(如加法模块、单位延迟模块)把系统的内部结构搭建出来。

(2)首先明确系统的输入和输出,如下图所示,其中w为,作为外部输入,这样外界可以通过输入不同的w以调节系统的响应。

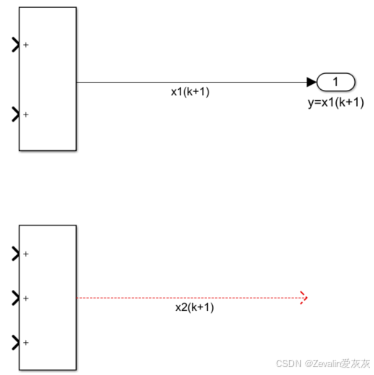
(3)时刻的状态变量基于
时刻的状态变量计算,因此需要明确
时刻的状态变量。
(4)按照状态空间表达式把剩余部分搭建完成,并添加示波器观测系统输出和系统输出步进值(即每个任务周期输出的变化量)。
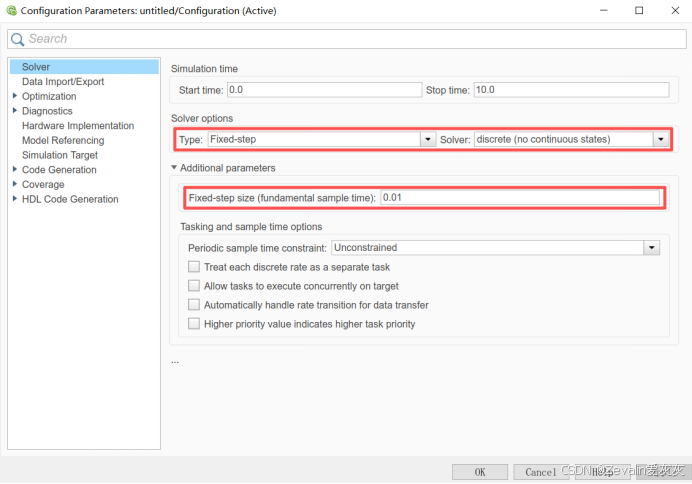
(5)将仿真求解器设置为离散且固定步长的,步长即为任务调度周期10ms。
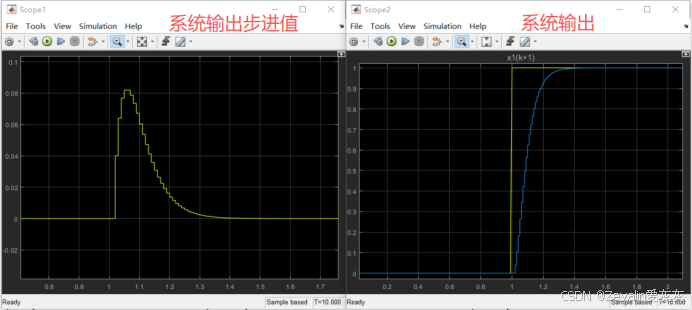
(6)将输入的w和u分别替换为常数和阶跃输入,变换不同的w,通过仿真观察系统的输出和输出步进值。(下图中输入的w为常数20)
2、优化方向
以上实验为基于临界阻尼二阶系统的响应调节器提供了可行性说明,在实际的算法开发中,需要注意一点,输入的w被改变,意味着整个系统发生变化,虽然系统结构不变,但内部参数改变了,基于系统变化产生的表现,可能需要重新调整系统变化后初始时刻的状态变量

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 9
9 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)