VCU整车控制器模型 MATLAB simulink模型功能模块如下: 输入信号处理 输出信号处理 加速踏板 制动踏板 档位控制 制动灯请求判断 加速踏板扭矩 蠕行扭矩 回馈扭矩 车速限制 跛行扭矩
VCU整车控制器模型 MATLAB simulink模型功能模块如下:
输入信号处理
输出信号处理
加速踏板
制动踏板
档位控制
制动灯请求判断
加速踏板扭矩
蠕行扭矩
回馈扭矩
车速限制
跛行扭矩
驾驶员扭矩需求仲裁
ADAS扭矩仲裁
扭矩协调
扭矩限制计算
扭矩限制处理
扭矩平滑(驾驶性处理)
车速估计
驾驶模式
人机接口(点灯语音提醒等)
故障检测确认
诊断管理
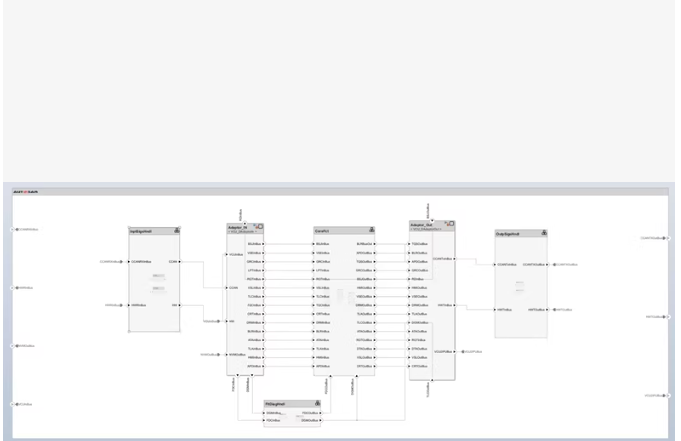
输入信号适配
输出信号适配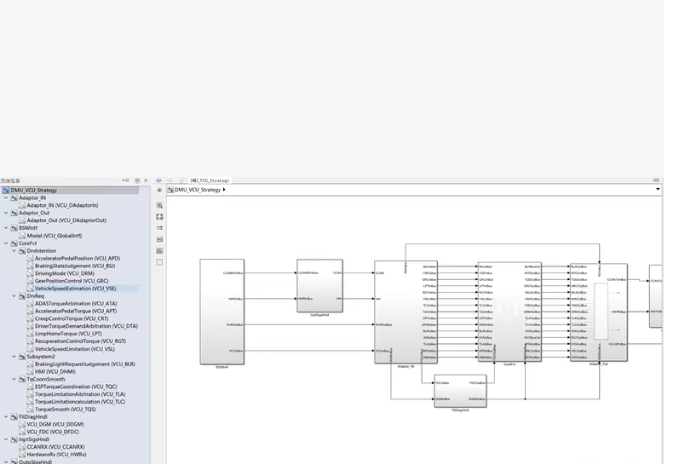
核心框架设计
在 Simulink 中,VCU 通常采用 分层架构:
Input Layer (输入层):处理原始信号(ADC 转换、滤波)。
Strategy Layer (策略层):你的核心代码所在位置(扭矩计算、逻辑判断)。
Output Layer (输出层):驱动执行器(PWM 生成、IO 控制)。
关键功能模块代码
驾驶员扭矩需求仲裁 (Driver Torque Request)
该模块处理加速踏板、制动踏板和巡航控制的逻辑冲突,确定驾驶员想要的扭矩。
function [TotalTorqueReq, AccPedalTorque, BrkPedalTorque, CrawlTorque] = DriverTorqueArbitration( …
AccPedalPos, BrkPedalPos, AccPedalMin, AccPedalMax, BrkPedalMax, …
CrawlEnable, CrawlSpeed, CurrentSpeed, …
CruiseActive, CruiseTorque)
% 输入:
% AccPedalPos, BrkPedalPos: 踏板位置百分比
% CrawlEnable: 蠕行使能标志
% CurrentSpeed: 当前车速
% CruiseActive: 巡航激活标志
% 输出:
% TotalTorqueReq: 最终请求扭矩 (Nm)
% 1. 加速踏板映射 (简化线性映射)
AccPedalTorque = mapPedalToTorque(AccPedalPos, AccPedalMin, AccPedalMax);
% 2. 制动踏板扭矩 (如果是回馈制动)
% 注:通常制动踏板直接请求制动力,但在电车中会映射为负扭矩
BrkPedalTorque = -1 * mapBrakeToTorque(BrkPedalPos, BrkPedalMax);
% 3. 蠕行扭矩计算
if CrawlEnable && (CurrentSpeed 5.0 % 假设刹车踩下超过5%
TotalTorqueReq = BrkPedalTorque; % 或者直接设为0,由制动系统处理
else
% 未踩刹车,比较加速踏板、巡航、蠕行
if CruiseActive
TotalTorqueReq = CruiseTorque;
else
% 优先使用加速踏板,叠加蠕行扭矩
TotalTorqueReq = AccPedalTorque + CrawlTorque;
end
end
% 5. 限值处理 (防止超限)
TotalTorqueReq = limit(TotalTorqueReq, -500.0, 500.0); % 假设电机最大扭矩范围
end
function t = mapPedalToTorque(pos, minP, maxP)
% 简单的踏板映射函数
if pos maxP
t = 500.0; % 最大驱动扭矩
else
t = 500.0 * (pos - minP) / (maxP - minP);
end
end
function t = mapBrakeToTorque(pos, maxP)
% 制动踏板映射 (假设最大回馈扭矩 100Nm)
t = 100.0 * pos / maxP;
end
故障检测与确认 (Fault Detection)
该模块负责对输入信号进行合理性检查(例如加速踏板一致性、电压过压等)。
function [FaultLevel, FaultFlags] = FaultDetection( …
AccPedalPos1, AccPedalPos2, VCU_Voltage, Battery_SOC, …)
% 输入:
% AccPedalPos1, AccPedalPos2: 双路加速踏板信号
% VCU_Voltage: 系统供电电压
% 输出:
% FaultLevel: 故障等级 (0=无, 1=警告, 2=严重, 3=停机)
% FaultFlags: 故障位掩码
FaultLevel = 0;
FaultFlags = 0;
% — 1. 踏板一致性故障 (典型的安全机制) —
PedalDiff = abs(AccPedalPos1 - AccPedalPos2);
if PedalDiff > 10.0 % 差值超过 10%
FaultFlags = bitset(FaultFlags, 0); % 置位第0位: 踏板故障
FaultLevel = max(FaultLevel, 2); % 严重故障
end
% — 2. 电压过压/欠压 —
if VCU_Voltage > 16.0
FaultFlags = bitset(FaultFlags, 1); % 置位第1位: 过压
FaultLevel = max(FaultLevel, 1);
elseif VCU_Voltage MaxDelta
DeltaReq = MaxDelta;
elseif DeltaReq = 2 % 如果有严重故障,强制进入跛行模式
DriveMode = ‘Limp’;
elseif ModeButton == 1 % Eco 模式
DriveMode = ‘Eco’;
else % Sport 模式
DriveMode = ‘Sport’;
end
end
Simulink 建模建议
状态机 (Stateflow):对于复杂的逻辑(如启动上电流程、充电逻辑、故障状态迁移),强烈建议使用 Stateflow 图来代替 MATLAB Function,这样更符合 AUTOSAR 标准且易于维护。
数据字典:使用 Simulink Data Dictionary 来管理所有的参数(如 MaxRampRate、BrkPedalMax),不要把常数写死在代码里。
总线 (Bus):将 AccPedalPos, BrkPedalPos, VCU_Voltage 等信号打包成一个 Simulink.Bus 对象,作为输入传递给各个子系统,保持模型整洁。
MATLAB Function 模块中,或者使用 Simulink 自带的 PID、Clarke/Park 模块进行搭建。
核心代码:FOC 控制器实现
坐标变换模块 (Clarke & Park)
该模块将三相定子电流 i_{abc} 转换为旋转坐标系下的 i_d 和 i_q,用于电流环控制。
function [id, iq] = Clarke_Park_Transform(ia, ib, ic, theta)
% 输入: ia, ib, ic (三相电流), theta (电角度)
% 输出: id, iq (d-q 轴电流)
% ********** 1. Clarke 变换 (三相 -> 两相静止) **********
% 简化版:假设三相平衡,ic = -(ia+ib),则可省略 ic 计算
% 这里使用完整的变换矩阵
alpha = ia;
beta = (2ib + ia) / sqrt(3);
% 注:更标准的公式是 beta = (ia + 2ib) / sqrt(3),取决于绕组定义
% ********** 2. Park 变换 (两相静止 -> 两相旋转) **********
% 使用三角函数实现旋转
cos_theta = cos(theta);
sin_theta = sin(theta);
id = alpha * cos_theta + beta * sin_theta;
iq = -alpha * sin_theta + beta * cos_theta;
end
电流控制器 (PI 控制器)
该模块计算电压矢量 V_d 和 V_q。通常 i_d 设为 0(单位功率因数控制),i_q 决定转矩。
function [Vd, Vq] = Current_PI_Controller(id_ref, iq_ref, id_fb, iq_fb, …
Kp_i, Ki_i, Ts, integrator_d, integrator_q)
% 输入: 参考值, 反馈值, PI参数, 采样时间, 积分项(状态)
% 输出: Vd, Vq, 以及新的积分项(用于下一次计算)
% ********** d 轴 PI 控制 **********
error_d = id_ref - id_fb;
integral_d = integrator_d + error_d * Ts;
Vd = Kp_i * error_d + Ki_i * integral_d;
% ********** q 轴 PI 控制 **********
error_q = iq_ref - iq_fb;
integral_q = integrator_q + error_q * Ts;
Vq = Kp_i * error_q + Ki_i * integral_q;
% 限幅处理 (防止积分饱和)
% Vd = saturation(Vd, Vmax);
% Vq = saturation(Vq, Vmax);
% 将积分项传递给下一次调用
integrator_d = integral_d;
integrator_q = integral_q;
end
速度控制器 (外环)
该模块根据转速误差生成 i_q 的参考值。
function iq_ref = Speed_PI_Controller(speed_ref, speed_fb, …
Kp_n, Ki_n, Ts, integrator_n, iq_max, iq_min)
% 输入: 转速参考, 转速反馈, PI参数, 采样时间, 积分项, 电流限幅
% 输出: iq_ref, 新的积分项
% 转速误差
error_n = speed_ref - speed_fb;
% 积分项更新
integral_n = integrator_n + error_n * Ts;
% PI 计算
iq_ref_raw = Kp_n * error_n + Ki_n * integral_n;
% 电流限幅 (防止过流)
iq_ref = max(min(iq_ref_raw, iq_max), iq_min);
% 积分抗饱和 (Anti-windup)
if (iq_ref ~= iq_ref_raw)
integral_n = integral_n * 0.9; % 稍微减小积分项
end
% 更新状态
integrator_n = integral_n;
end
空间矢量调制 (SVPWM) - 可选
如果你使用 SVPWM Generator 模块,可以直接连接 V_d 和 V_q。如果你需要手写代码,逻辑较为复杂,建议使用 Simulink 库中的 SVPWM 模块,输入 V_d, V_q 和 theta 即可输出三相 PWM 波。
模型搭建提示
电机模型:使用 Simscape Electrical 中的 Permanent Magnet Synchronous Machine。
逆变器:使用 Universal Bridge,器件选择 IGBT。
坐标系:注意电机模块的 Mechanical Rotational Port 输出的角度 theta 是机械角度,需要乘以极对数 P 才能得到电角度 theta_e。
即:theta_e = P * theta_m
反馈:电流反馈通常通过 Current Sensor 测量三相电流,转速通过 Ideal Rotational Motion Sensor 测量。
MATLAB Function (M-Code) 代码。你可以将这些代码放入 Simulink 的 MATLAB Function 模块中,构建你的 VCU 模型。
我们将重点实现以下关键模块:
加速踏板扭矩映射 (APT)
驾驶员扭矩需求仲裁 (DTA)
扭矩平滑 (TQS)
驾驶模式管理 (VSE)
加速踏板扭矩 (APT)
该模块将加速踏板的百分比位置映射为电机请求的扭矩。这里包含了“运动模式”的逻辑。
function [AccTorque] = AccPedalTorqueMap(AccPedalPos, Mode_Sport)
% 输入: AccPedalPos (0~100%), Mode_Sport (0或1)
% 输出: AccTorque (请求扭矩 Nm)
persistent AccMap;
if isempty(AccMap)
% 初始化映射表 (简化版:线性或查表)
% 假设最大请求扭矩为 300 Nm
AccMap = [0, 50, 100, 150, 200, 250, 300];
end
% 简单的线性映射逻辑
if Mode_Sport == 1
% 运动模式:响应更灵敏,例如 50% 踏板给 70% 扭矩
AccTorque = AccPedalPos * 3.5;
else
% 舒适模式:线性响应
AccTorque = AccPedalPos * 3.0;
end
% 限制最大值
if AccTorque > 300
AccTorque = 300;
end
end
驾驶员扭矩需求仲裁 (DTA)
这是VCU的核心。它接收加速踏板、制动踏板和巡航控制的信号,决定最终输出给电机的扭矩。
function [FinalTorqueReq] = DriverTorqueArbitration( …
AccTorque, BrkPedalPos, …
CruiseActive, CruiseSetSpeed, CurrentSpeed, …
LimitMin, LimitMax)
% 输入:
% AccTorque: 加速扭矩请求
% BrkPedalPos: 制动踏板位置 (0~100)
% CruiseActive: 巡航激活标志
% CurrentSpeed: 当前车速
% ********** 1. 制动优先 (Brake Override) **********
if BrkPedalPos > 5 % 制动踏板踩下超过 5%
FinalTorqueReq = 0; % 强制扭矩为0,切断动力
return;
end
% ********** 2. 巡航控制逻辑 **********
if CruiseActive == 1
if CurrentSpeed LimitMax
FinalTorqueReq = LimitMax;
elseif FinalTorqueReq DeltaMax
if DeltaReq > 0
SmoothedTorque = PrevTorque + DeltaMax;
else
SmoothedTorque = PrevTorque - DeltaMax;
end
else
SmoothedTorque = TorqueReq;
end
% 更新历史值
PrevTorque = SmoothedTorque;
end
驾驶模式管理 (VSE)
该模块根据用户选择(如运动、经济、雪地模式)输出不同的限制参数,供其他模块使用。
function [MaxTorque, MinTorque, EnergyRecMode] = VehicleSpeedEstimation(ModeSelect, CurrentSpeed)
% 输入: ModeSelect (1=舒适, 2=运动, 3=经济)
% 输出: MaxTorque, MinTorque (Nm), EnergyRecMode (回馈强度)
switch ModeSelect
case 1 % Comfort (舒适)
MaxTorque = 250;
MinTorque = -100; % 允许轻微回馈
EnergyRecMode = 1; % 低回馈
case 2 % Sport (运动)
MaxTorque = 300;
MinTorque = 0; % 禁止回馈,滑行更远
EnergyRecMode = 0;
case 3 % Eco (经济)
MaxTorque = 200; % 限制峰值功率
MinTorque = -150; % 加强制动能量回收
EnergyRecMode = 2; % 高回馈
otherwise
MaxTorque = 250;
MinTorque = -100;
EnergyRecMode = 1;
end
end
故障检测确认 (Err)
简单的故障诊断逻辑示例(如踏板信号故障)。
function [FaultCode] = FaultDetection(AccPedalSig1, AccPedalSig2, BrkSig)
% 输入: AccPedalSig1/2 (双路踏板信号), BrkSig (制动信号)
% 输出: FaultCode (故障码)
FaultCode = 0; % 无故障
% ********** 1. 加速踏板一致性检查 **********
% 踏板通常有两路信号,比例固定 (例如 1:2)
if abs((AccPedalSig1 * 2) - AccPedalSig2) > 10
FaultCode = 1; % 踏板信号不一致
end
% ********** 2. 制动信号范围检查 **********
if BrkSig 100
FaultCode = 2; % 制动信号超范围
end
% ********** 3. 冲突检查 (制动时加速) **********
if BrkSig > 10 && AccPedalSig1 > 10
FaultCode = 3; % 制动加速冲突
end
end
MATLAB Function 模块,
连线:根据表格中的数据流(例如 APT 的输出连到 DTA 的输入),连接各个模块。
配置参数:设置仿真步长(建议 0.01s 或 0.001s),选择变步长或定步长。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 7
7 0
0- 0



 已为社区贡献91条内容
已为社区贡献91条内容

所有评论(0)