气动预测模型的建立——文献启发
需要请gpt出主意的
自变量:扑动幅度,倾角,前飞速度。都可能会影响函数f
需要调整的函数f:有效攻角alpha-升力系数CL的关系
函数f的形式
f= -(w1*sin(alpha).*cos(alpha).^2+w2*sin(alpha).^2.*cos(alpha)).*Al*A2;
函数中包含的两个关键参数:w1和A2,可能受3个自变量的影响,在不同的组合下,要取不同的值
有一些数据。
目前的方法是,在给定的自变量组合下,调整w1和A2,让准定常结果尽量和CFD仿真对上。
有什么工具,可以让我得到更准确的A2 w1关系(成本从低到高)
积攒的论文包括:
1. 简单的,对准定常公式的系数改变。
2. 神经网络的1篇。
3. 陈,王等对准定常公式细节的讨论,比如纯旋转力+旋转/平动速度的耦合力。这个虽然目前对预测升力推力不重要,但是对机体倾转动态,还有导数,是有影响的。这个已经看完。
1. Flapping-wing robot achieves bird-style self-takeoff by adopting reconfigurable mechanisms (西工大)
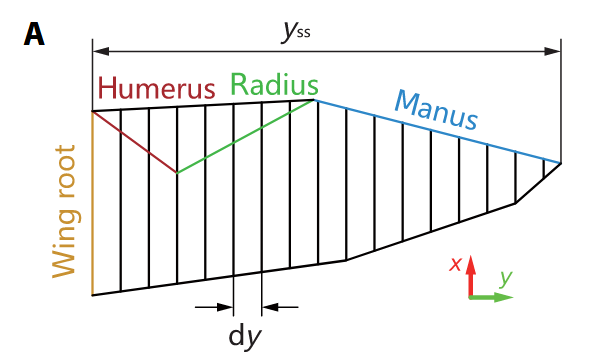
需要做仿真,因此要建立快速气动模型。用的是strip theory; blade element theory:
The strip theory (or blade element theory) is a quasisteady method widely used for unsteady aerodynamic approximation of the flapping wing problem (55, 56). Because the quasi-steady model usually requires less computational effort, it can be applied to fast real-time dynamics simulation (57).
the wing surface is divided into a number of strips, which are used to calculate the aerodynamic contributions of each strip at its own airspeed and angle of attack.
为什么不能直接用以前的准定常模型:Some specific models are used to describe and analyze the flight of insects or insect-like flapping-wing robots with hovering capabilities (56, 58), which are usually developed and calibrated only for insect-style hovering flight in the low–Reynolds number range (Re 100 ~ 1000) but do not predict well for level flight at higher–Re number situations.
Another design-oriented model is commonly used to describe the equilibrium-level flapping flight (55, 59), which is a more accurate reproduction of level flight situation due to the account of leading-edge suction and vortex wake effects(看来平飞时确实有一些独特之处) but cannot be applied to hovering and takeoff situations.
悬停和前飞的非定常效应有区别,这一点可作为我研究的支撑:Unsteady effects of flapping-wing aerodynamics follow different mechanisms in hovering and in level flight.
而且,他们的翼是多段的,更不能直接用了。这样都能解决,我的也不是什么问题~可以参考
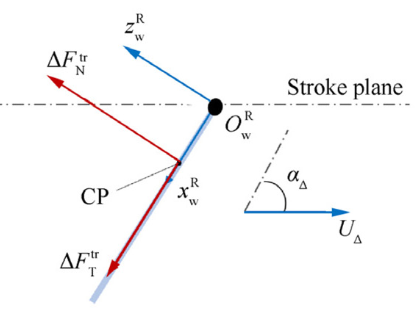
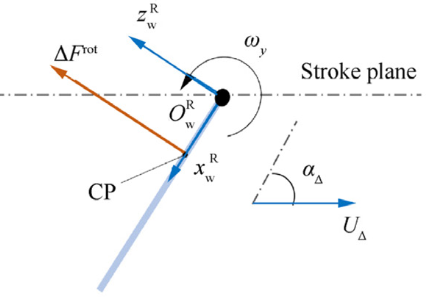
To cope with the complex flight state and wing morphing in RoboFalcon’s takeoff simulation, we refer to previous researchers’ ideas and propose the following aerodynamic model.
The aerodynamic force components in Fig. 8B on each strip can be expressed as
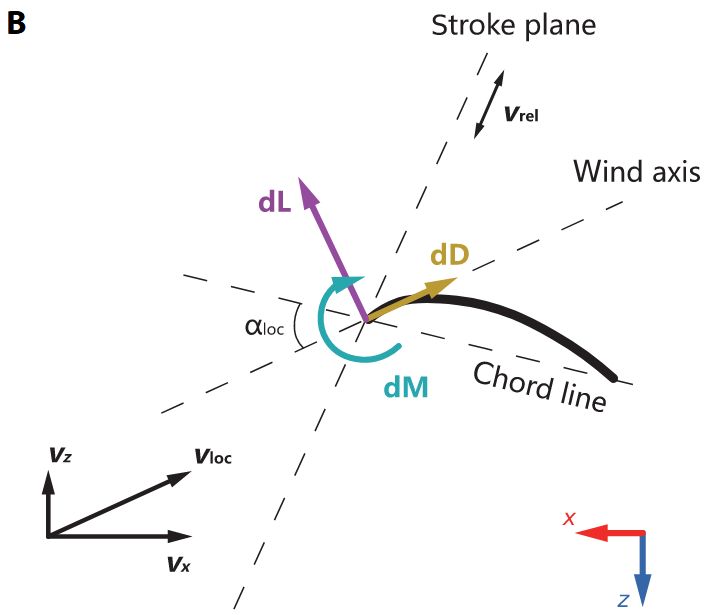
![]()
这个公式较简单,只是拟合公式。除了动压、面积之外,只有一个和当地有效攻角相关的系数CF,和一个修正系数Cus。
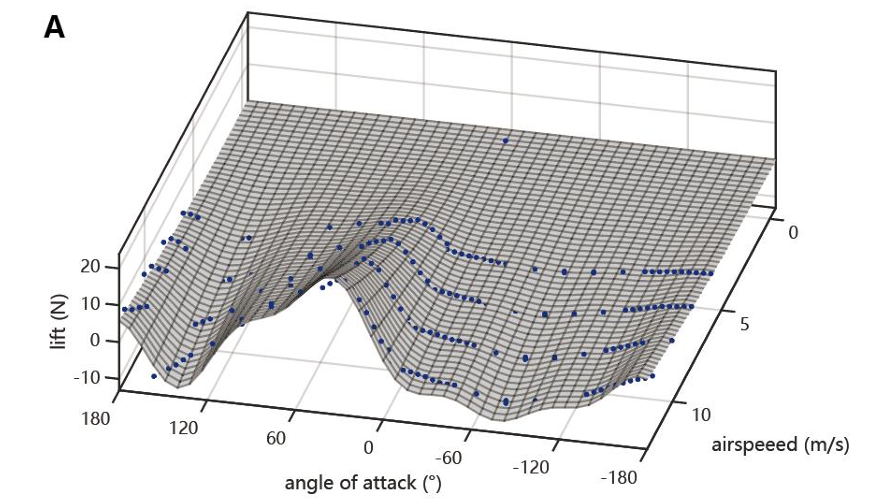
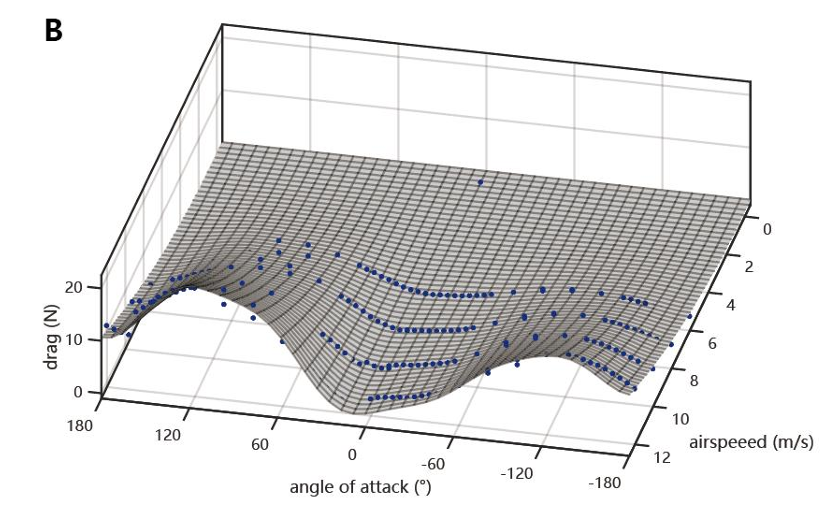
其中CF是fitting the wings’ steady wind tunnel measured data. 对于函数CF(αloc),通过在风洞中测量RoboFalcon在不同空速和攻角(−180°~180°)下的稳态气动力(升力、阻力和俯仰力矩),随后通过测量数据点的曲面拟合推导得到。
曲面拟合如下


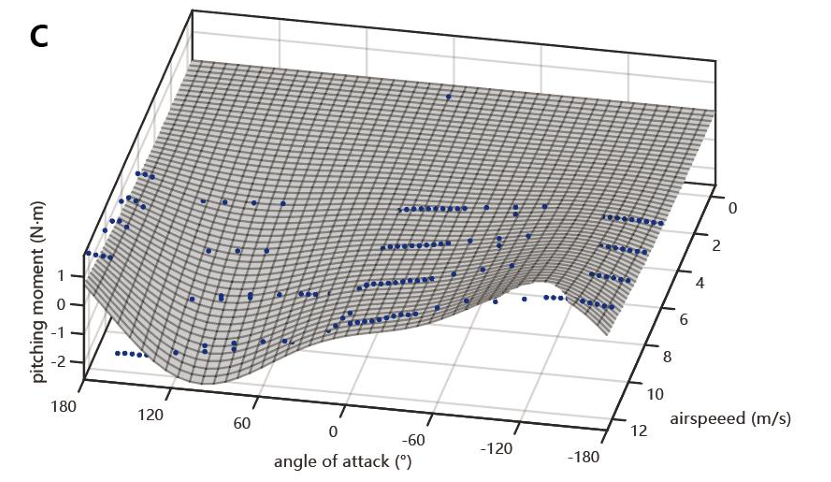
![]()
非定常因子Cus近似代表了包括附加质量力和涡流尾迹效应在内的大部分非定常流动信息。根据扑翼飞行的非定常特性,假定它是一个随空速增加、频率/振幅减小而单调递减的变量。
![]()
其中Cuh称为unsteady-hovering coefficient,而Cul称为unsteady level–flight coefficient。当空速较高时,vx远大于vref,非定常因子趋近1,此时模型更多反映翼的稳态流动特性。当空速较低时,非定常因子趋近于大于1的常数,翼条更处于非定常流动状态,并受到一定增强气动力作用。对比RoboFalcon2.0在不同空速下的实验数据与未引入非定常因子的气动模型仿真数据,可确定参数Cuh和Cul的取值(定参)。
![]()
这种处理方法的讨论:该模型中引入的非定常因素使得精度不及更精细的模型,但同时也规避了附加质量力、前缘涡等复杂非定常气动效应的讨论,从而仅需依靠特定翼型的稳态测量数据即可重建RoboFalcon的主要空气动力学特性并应用于仿真。(所以,如果只是需要一个实时气动模型用于仿真的话,可以规避一些非定常效应的机理讨论;可以只针对这一个翼型来建模。)模型的具体参数与仿真结果见补充材料(可以做!做的时候找来看看)。
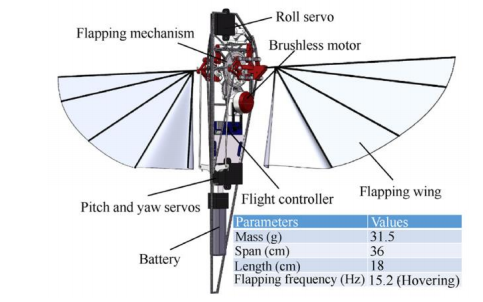
2. Modeling and flapping vibration suppression of a novel tailless flapping wing micro air vehicle(西工大NPU-Tinybird,神经网络模型,2021.10)
无尾机型,重量31.5g,翼展36cm,扑动频率15.2Hz。
疑问:是可悬停的那种吧;飞行 能力如何?
滚转、俯仰和偏航控制均为整体偏转扑动平面(看翼的样子,也像)。
本来准定常气动力模型。没有特别的地方。
另外,怎么这里就是平均化模型了,怎么线性化还需要辨识的问题?看看是怎么个事情

神经网络,系统辨识,这些高大上的方法,似乎都是用在平均化和线性化那里。
This kind of method is not only able to simplify the aerodynamic model and reflect the boundary of model error, but also to offer the possibility of fusing more aerodynamic data from other types of technology, such as the wind tunnel experiment or CFD technology in future works.

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 16
16 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)