遥感数字图像处理教程【2.4】
5.5.3 绝 对 大 气 校 正
主要有两种方法:①基于地面真实数据的经验方程方法;②基于图像暗像元的方法。校正后图像的像素值为绝对值、辐亮度或反射率。
1 . 经验方程法
校正后为绝对的反射率值,主要考虑的是大气的加性贡献。
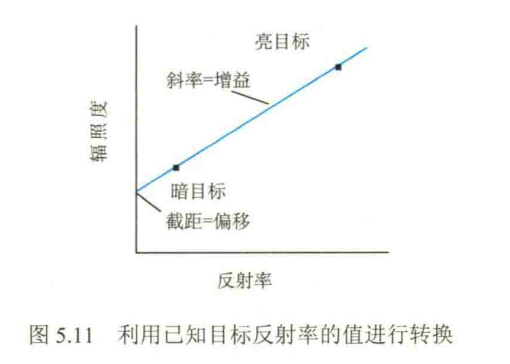
本方法需要图像中具有两个以上光谱均一、有一定面积大小的目标,它们分别作为暗目标和亮目标的定标点。假 定 图 像 DN值 与 反 射 率 /之 间 存 在 线 性 关 系 : DN = kr +b
实测两个定标点的地面反射率,然 后 ,利用线性回归分析确定反射率与像素值间的关系,求出系数 入 b , 最 后 借 此 关 系 式 计 算 像 素 的 反 射 率(图 5.11)o
在使用过程中,对定标点有如下要求:
(1)要选择尽可能各向同性的均一地物,且面积足够大。
(2)地 物 在 光 谱 上 要 跨 越 尽 可 能 宽 的 反 射 光 谱段 ,明暗目标之间要有足够的差异。(3)要尽可能与研究区域保持同一海拔高度。
类似地,野外光谱测量也可以与卫星成像同步进行。通常选用同类仪器测量,将地面测量结果与卫星图像中对应像素亮度值进行回归分析。
在获取地面目标图像的同时,也可预先在地面设置反射率已知的标志,或事先测出若干地面目标的反射率,把由此得到的地面实况数据和传感器的输出值进行比较,以消除大气的影响。因为遥感过程是动态的,在地面特定地区、特定条件和一定时间段内测定的地面目标反射率不具有普遍性,所以该方法仅适用于包含地面实测数据的图像。
该 方 法 的 转 换 结 果 是 地 表 平 均 表 面 的 反 射 率 , 因 为 这 个 转 换 没 有 包 括 可 能 的 地 形影 响 。
2 . 暗像元法
暗像元是图像中最暗的像元,也 就 是 DN或反射率最低的像元。利用暗像元可以进行大气校正。
暗像元大气校正方法的理论依据在于大气散射的选择性,即大气散射对短波影响大,对长波影响小。以陆地资源卫星T M 图像为例,1 波段受散射影响最严重,其 次 为 2 波段、3波段,而 7 波段受散射影响最小。对于陆地遥感,可以假设7 波段中最暗的像元是没有信号的,即理论上像元值为0。如果该值不为0 , 则该值来自于大气的散射贡献。
为处理方便,陆地遥感把红外和近红外图像中的最暗的像元看作无散射影响,通过不同波段的对比分析计算出大气散射的干扰值。一般通过两种方法进行计算:回归分析法和直方图法。
1)通过回归分析确定校正参数
在不受大气影响的波段和待校正的某一波段图像中,选择最黑区域(通常为高山阴影、深的清洁的水体、茂密的森林)中的一系列目标,将每一目标的两个待比较的波段亮度值提取
出来进行回归分析。例如,在 T M 图像中,蓝光波段的B 1大气散射最大,红外波段的B 7散射最小。图像中的深的大面积水体与地形阴影在B 7 中是黑的,如果不存在附加的辐射,这些水体与阴影在其他波段也应该是黑的,B 1与 B 7应该具有比例关系。如果受到影响,那么,在其他波段会产生偏移。
若 对 B 1进 行校正,首 先 在 B 1上的最黑区域中选择一系列目标(如地形阴影区),再找 出 B 7上对应的目标,以这两个波段做散点图,并作回归分析,以确定偏移量。回归方程为式中,丛 和 S 为 遥 感图像1 波 段 和 7 波段目标的灰度值: % 和小为直线的斜率和截距。
校正后的囱的值为

式中,历 为 图 像 1 波段的灰度值;方是上述方程的截距,即偏移量。同理,用上述方法可以对T M 图像的其他波段分别作校正。

注意:作为暗像元的区域一定是类似于高山阴影区的在所有波段反射率低的区域。因为地物的波谱响应在各波段是不同的,一个波段反射率低并不意味着在另一个波段的反射率也低。如果不是在各个波段全黑,回归分析得到的拟合曲线就加进了地物波谱特性因素而不全是散射的影响,结果是无意义的。
有关暗像元大气校正的更多内容,建 议 阅 读 Chavez(1988)的论文①。
2)通过直方图确定校正参数
遥感图像的光谱包括了可见光和近红外范围,路径辐射影响不能被忽略。如果图像内包括暗色地物或地形阴影,可从各个波段中减去其最小的亮度值(或一个阴暗地区的平均亮度值)来进行校正。
如果在图像中存在亮度值为零的目标,如深海水体、高山背阴处等,各个波段的亮度值都应为零。但实际上只有不受大气影响的波段才为零,其他波段由于受大气中的水汽散射等的影响(路径辐射)而使目标亮度值不为零。
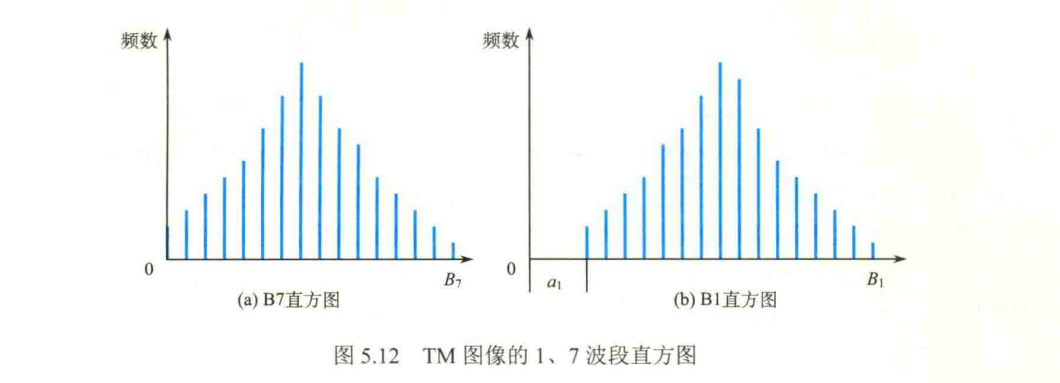
图 5.12是 陆 地 资 源 卫 星 1、7 波段的直方图。从 B 7 的直方图来看,图像中存在最黑的目标 。从 B 1 的直方图来看,最 小 的像素值不是0 , 而 是 内 。因此,假 设 m 就是大气散射的影响 ,将 B 1 的 图 像 像素值减去6 就 实 现 了 对 B 1 图像的大气校正。其他波段可以用类似的方法进行校正。
应注意的是,如果图像内找不到暗像元区域(阴影、茂密的植被、干净的深水等),暗像元大气校正就不能使用了。
5 . 6 地面辐射校正
5 . 6 . 1 太阳辐射校正
地表一个区域反射的能量取决于照射这个区域的太阳能和其他能量的入射角。入射角是入射能量的方向与地表法线间的夹角。特别地,每个波长获得的能量(4 )随入 射 角 (。)的余弦变化: E g = E o x c o s 0 , 其 中 & )是入射的能量。因 此 ,任何地表获得的能量都随太阳高度变化,而不同时间和季节太阳高度是不同的。
太阳辐射校正,主要校正由太阳高度角(sun elevation)导致的辐射误差,即将太阳光线倾斜照射时获取的图像校正为太阳光线垂直照射时获取的图像。
太阳的高度角。可在图像的元数据中找到,也可以根据成像时刻的时间、季节和地理位置来确定。
式 中 ,。为图像地区的地理纬度;3 为太阳赤纬(成像时太阳直射点的地理纬度):,为 时 角 (地区经度与成像时太阳直射点地区经度的经差)。
太阳高度角的校正通过调整一幅图像内的平均灰度来实现。在求出太阳高度角后,以高度 角 。斜射时得到的图像g (x,力 与 直 射 时 的 图 像 /(苍外有如下关系:

如果不考虑天空光的影响,各波段图像可采用相同的e 角进行校正,或者用下面的公式进行校正:
式 中 , ,为太阳天顶角,即 90° 减去太阳高度角; D N 为校正后的亮度值; D N 为原来的亮度 值 。这种校正或补偿,主要应用于比较不同太阳高度角(不同季节)的多日期图像。
对于相邻地区不同时期的图像,为了使图像便于衔接或镶嵌,也需要进行太阳高度角校正 。校正的方法是以其中一景图像为标准(或称为参考图像)来校正另一景图像,使之与参考图像相近似。若参考图像的太阳天顶角为小要校正的图像的太阳天顶角为/2,其 亮 度值用D N表 示 ,则校正后的亮度值D N ' 为

5 . 6 . 2 地 形 校 正
如果地形不平坦,受坡度和坡向的影响,传感器获得的能量也会变化。校正由地形因素如坡度和坡向导致的图像辐亮度的变化称为地形校正。
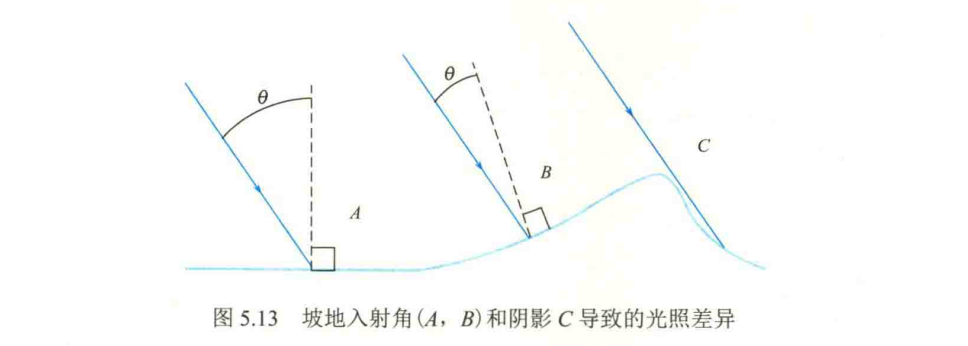
一个区域所获得的能量会因阴影而有所减少。 由地形或云投射的阴影影响着成片的连续的像素。树 、作物行、岩石露头或其他小物体也能产生阴影,但仅影响单独的像素。这两种类型的阴影会降低各个波长的亮度值(图 5.13)o
地表反射到传感器的太阳辐亮度和地表坡度有关。对由此产生的辐射误差,可以利用地表法线向量与太阳入射向量之间的夹角来校正。对于多个波段图像,利用波段比值也可以消除地表坡度的影响。
简单的地形辐射校正可使用余弦法①。
设太阳天顶角为s ,入 射 角 为 3 遥 感 图 像 上 的 辐 射 值 为 〃 ,则校正后水平面上的辐射值品 为 (图 5.14)
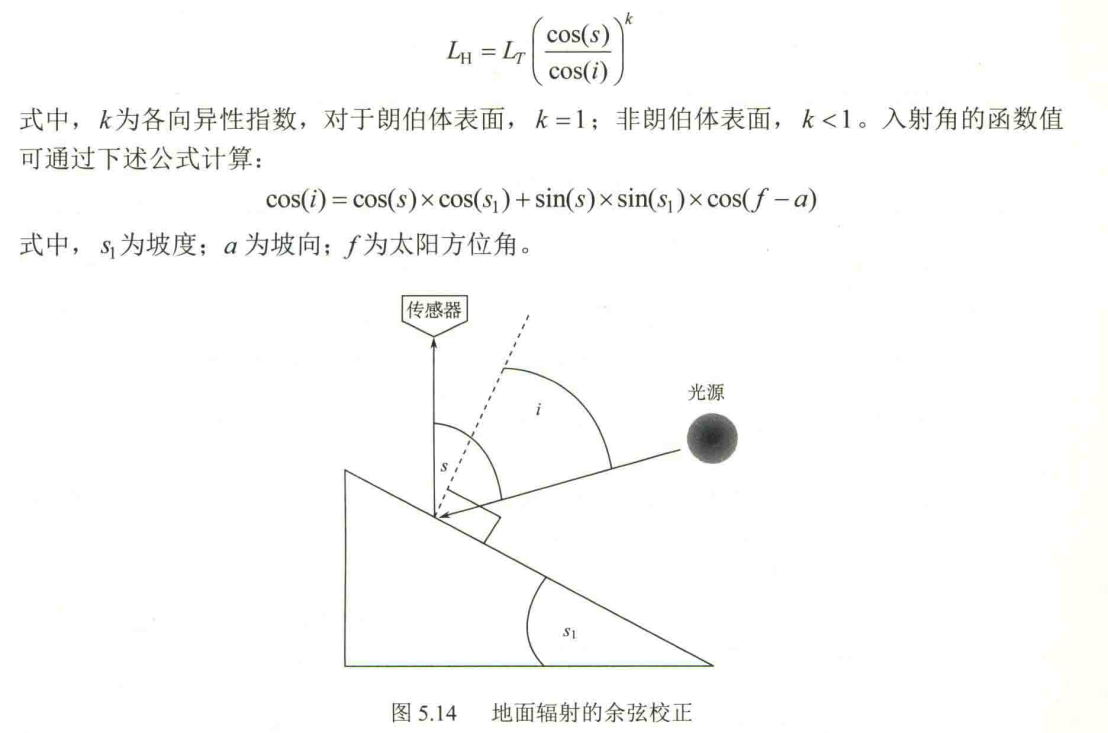
这种校正方法计算简单,但由于仅仅考虑了直射光,没有考虑天空的漫射光和邻域的影响(如周围山顶的影响) ,如 果 i 过 小 ,则可能出现过度校正。更多的内容建议参阅:Smith JA, Lin T L, Ranson K. The lambertian assumption and landsat data. Photogrammetric Engineering and Remote Sensing, 46:1183-1189。
5 . 7 辐射定标和验证
遥感数据中除了由遥感器的灵敏度特性引起的偏差外,还有大气及遥感器测量系统等混入的失真。辐 射 定 标(calibration)是将得到的测量值变换为绝对辐亮度的操作。为了校正大气引 起 的 失 真 而 对 地 表 反 射 率 及 表 面 温 度 等 物 理 量 进 行 相 关 处 理 的 过 程 称 为 辐 射 验 证(validation)。
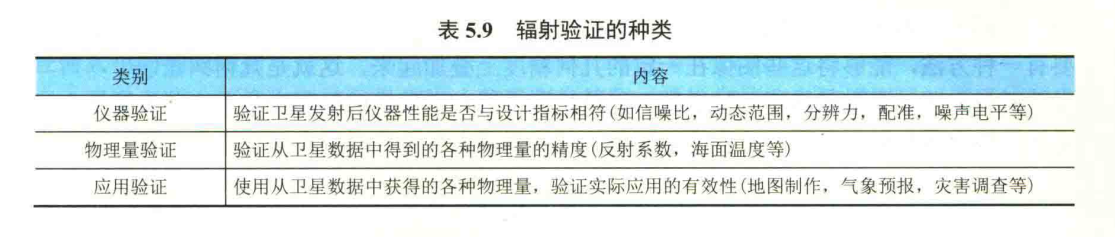
定标用 的数据有地面 定 标 数 据 和 轨 道 定 标 数 据 (表5.7) o 前者是在卫星发射前,使用地面校准装置得到的数据,多刊载于用户手册中。后者是在卫星发射后,在卫星内部测量标准光源等已知目标而得到的数据,并从卫星上传送下来,其内容可分为三类,见 表 5.8。
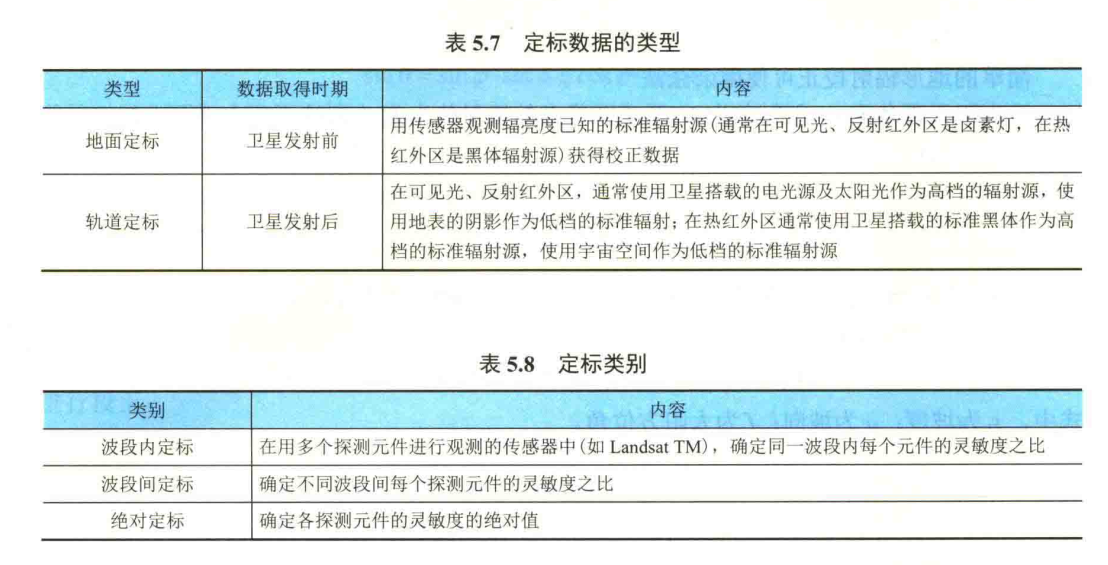
可见光近红外区的地面定标主要采用标准灯和积分球。这种方法的定标精度根据波长而定 ,一 般 在 2%〜 5%。因为这些定标值在卫星发射后变化较大,所以必须使用卫星上的校正源进行监测。校正源多使用电灯、太阳光扩散板等,通过对月球的观测数据进行高精度定标的方法也已经开始采用了。因为电灯、扩散板等数据会随时间变化,而月球不会变化,所以在 轨 道 上可以得到2%左右的定标精度。
热红外区使用黑体进行定标。在 地 面 上 通 过 采 用 辐 射 率 为99.9%以上的空洞黑体可以进行高精度的定标,在轨道上也可以利用搭载较高辐射率的黑体和宇宙深空的两点进行定标,定 标 精 度 可 达0.1〜 0.2K。搭载的标准黑体的温度通常用白金电阻温度计测定。
与 在 轨 定 标 相 对 应 , 使 用 地 面 上 的 测 量 数 据 进 行 遥 感 器 的 定 标 称 为 替 代 定 标(vicarious calibration) o 替 代 定 标 在 地 面 或 飞 机 上 测 量 来 自 地 表 的 辐 射 量 ,同时测定上空的 大 气 (在 可 见 光 近 红 外 区 主 要 是 气 溶 胶 ),使 用 测 量 值 和 大 气 辐 射 传 输 方 程 ,估算应该到达 遥 感 器 的 辐 射 量 从 而 实 现 校 正 。以测定海水中叶绿素含量为目的的遥感器等往往采用替代 定 标 方 法 。
验证的主要目的是评估从卫星数据中得到的海面温度等物理量的准确程度。验证方法根据物理量而有所不同,不能一概而论。
以海面温度为例,目前最广泛使用的海面温度来自NOAA卫 星 搭 载 的 AVHRR数据。为了验证数据的准确性,NOAA主要采用了浮标数据。通过使用包括固定浮标和漂流浮标在内共 计 约 3000个浮标数据,可 以 保 证 约 0.5K的精度。然而实际上浮标测量的温度是海面下1m一个位置的温度,而 卫 星 观 测 是 表 面1mm以下、水 平 空 间 约 Ikm2的平均温度,所以通常验证数据测量值和卫星遥感器测量值是不同的。
在验证中,除了验证海面温度物理量外,还有检验观测仪器性能的仪器验证和检验实际应用效果的应用验证(表 5.9)。无论哪种验证,为了采集验证数据都必须进行现场调查。
中国的高分系列、资 源 三 号 01a、资 源 一 号 0 2 c等卫星图像,其定标系数可在中国资源卫星应用中心的网站下载:http://www.cresda.com/CN/Downloads/dbcs/index.shtmlo国外卫星图像的定标系数,如果没有在数据包的元数据文件中,可咨询数据提供商。
5 . 8 辐射校正的软件工具
专业的辐射校正工具有:①ENVI系统中的工具,快 速 的 辐 射 校 正 的QUAC工 具 ,专业的 Flaash工具;②ERDAS IMAGINE中的附加模块ATCOR;③PCI Geomatic中的工具ATCOR,可以直接使用;④ 免 费 的 6 s 校正工具,可以直接下载使用①。Satellite Imaging公司的大气补偿 的 图 像 自 动 化 预 处 理 工 具 ACOM P®,主 要 用 于 高 空 间 分 辨 率 遥 感 图 像 的 辐 射 校 正 ,如WorldView, GeoEye图像等。水色遥感中,大气校正一直属于研究的热点。Masek等 在 2013年构建了一个LEDAPS大气校正方案③,能更好地突出水体中的信息。
5 . 9 图像的几何误差
遥感图像的几何误差可分为静态误差和动态误差两大类。静态误差是指成像过程中,传感器相对于地球表面呈静止状态时所具有的各种误差;动态误差则主要是由于成像过程中地球的旋转所造成的图像误差。
按照来源可分为内部误差和外部误差两类。内部误差主要是由于传感器自身的性能、技术指标偏离标称数值造成的。例 如 ,对于框幅式航空摄影机,有透镜焦距变动、像主点偏移、镜头光学畸变等误差;对于多光谱扫描仪,有扫描线首末点成像时间差、不同波段相同扫描线的成像时间差、扫描镜旋转速度不均匀、扫描线的非直线性和非平行性、光电检测器的非对中等误差。静态误差随传感器的结构不同而异,本书不作讨论。
外部误差指的是传感器本身处在正常工作的条件下,由传感器以外的各因素所造成的误差 。例 如 ,传感器的外方位(位 置 、姿态)变 化 、传感介质的不均匀、地球曲率、地形起伏、地球旋转等因素所引起的变形误差等。这些误差往往在获取图像后进行了系统的校正。
5 . 1 0 几何纠正的概念和内容
来自于相同平台位置和传感器的多光谱图像容易纠正。当图像来自于不同的传感器、平台、高度或视角的时候,就会产生一些问题。在这种情况下,如果简单地将各个图像叠加在一 起 ,因为变形、 比例变化、几何、阴影、平台的稳定性等均会产生错误的匹配。所 以 ,需要有一种方法,能够将这些图像在一定的几何精度上叠加起来,这就是几何纠正。
几何纠正必须在遥感图像信息提取之前进行。只有把所提取的图像信息表达在某一个规定的空间投影参照系统中,才能进行图像的几何量测、相互比较以及图像叠加分析。
5 . 1 0 . 1 基 本 概 念
图像配准(image registration):指两幅图像之间的对准(image to image), 以一幅图像作为参 考 ,利用特征寻找两幅图像中相同地物点,然后将待处理图像的坐标变换到参考图像上,体现了同一空间位置的两个不同传感器图像或不同波段图像间的采样关系。这个过程是相对的,又称为相对几何纠正或图像匹配(image matching)。
图像纠正(image rectification):将图像与参考对象平面(一般是地图,或具有精确投影和地理坐标的图像,或测量的点)的同名地物点对准(image to map)后进行变换处理,使图像与参考对象具有相同的投影和坐标系,又称为绝对几何纠正。
地 理 参 考 (georeference):这个概念常出现在地理信息系统中,指通过投影变换把图像与自然空间(来自于地图或具有投影和地理坐标的图像,或测量的点)的地理位置相关联的过程。图像纠正中如果使用了地理坐标系,那么就是地理参考。
正 射 校 正 (orthorectification):对 图 像 逐 像 素 进 行 地 形 校 正 的 过 程 ,其结果为正射图像(orthophoto), 相 关 的 产 品 称 为DOM (digital orthophoto m叩)。具 体 的 方 法 请 参 阅 《摄影测量学 》。对于建筑密集的城区,正射校正后图像中的高层建筑仍然是倾斜的。经过正射校正后,图像上任何点的定位精度独立于地形和卫星的倾角。
真正射校正(true-orthorectification):基于数字表面模型(digital surface model, DSM) 1,利用数字微分纠正技术,改正图像的几何变形的过程,校 正后,每个像素具有垂直视角,称为真正射图像(true ortho)。按照国家规定,真正射图像的来源图像的航向重叠或旁向重叠至少 达 到 68%和 7 5 % ,高 于正射校正需要的60%和 25%O 具 体 的 方 法 请 参 阅 《摄影测量学》。地 理 编 码(geocoding):在图像中,指对校正后图像的像素与具体的地理位置,主要是门
牌号等进行编码匹配,以便与其他数据进行叠加分析。在地理信息系统中,则是将点位数据与门牌号等进行编码匹配的过雇。
对 于 空 间 分 辨 率 大 于10m的图像,特别是亚米级图像,受遥感器成像的影响,地物在图像中并非是垂直视角的,例 如 ,高大的建筑物是倾斜的,必须进行正射校正。低于该分辨率的图像,根据需要和数据情况选择进行正射校正。真正射校正的成本高,多用于制作大比例尺地图。
5 . 1 0 . 2 纠 正 模 型
卫星图像几何纠正模型有:非参数模型和参数模型。非参数模型包括:多项式和有理函数 模 型 (rational function model), 适用于中、小面积的经过系统几何纠正的图像,如 IKONOSG eo 级产品,QuickBird正射标准图像产品。参数模型又称为严格物理模型,适用于任何类型、任何大小的图像数据。
研究表明,严格物理模型最稳定,整景图像精度一致性好。非参数模型只纠正了控制点附近的误差,没有控制点的地方会产生新的误差,模型稳定性、一致性不好,精度高低依赖于控制点的数量和分布。
1 . 多项式模型和有理函数模型
多项式和有理函数模型在无法获得传感器参数的情况下使用,需要较多的控制点,只能纠 正 控 制 点 处 的 误 差 ,没 有 消 除 控 制 点 之 间 的 变 形 ,其 精 度 极 大 地 受 地 面 控 制 点 (ground control point, G C P)分布的影响。大的图像必须分块纠正,每一块图像使用单独的模型。多项式模型常用于中分辨率如Landsat图像的几何精纠正。如果图像的元数据中包括了 RPC (rational polynomial coefficients)数据,则在多项式纠正的基础上可以再使用R PC 做正射纠正。
多项式模型最简单,常用来纠正控制点处的平面变形,不考虑地面高差,适用于小范围平坦地区。模型通过建立原始图像坐标与地理参考坐标之间的数学关系,来实现图像几何变形的校正,没有考虑传感器模型;通常在原始遥感图像物理模型不可知的情况下使用。
多项式模型包括两种:2 D 多项式模型和3 D 多项式模型。
(1 )2 D 多项式模型,最先出现,主要应用于系统误差已经校正的图像,不能反映各种误差来源,也不考虑地形高差引起的畸变,只限于小范围、高差较小的区域,变形较小的如星下点获取的或经过系统几何纠正的数据,对输入误差敏感。2 D 多项式模型不适于区域高差明显的遥感图像和高分辨率遥感图像的精校正。
( 2 )3 D 多项式模型,是 2 D 多项式模型的扩展,适用于小范围的图像数据、需要大量的高精度的、分布良好的G C P ,对输入误差敏感。只有在无法获取成像系统的相关参数或没有可用的参数模型的条件下使用,不需要成像系统的先验知识,没有明确的物理意义。
有理函数模型在2 0 世 纪 8 0 年代开始使用。随着高分辨率遥感图像的使用,R P C 有理函数模型引起了人们的高度关注,主要原因是图像供应商不提供卫星和传感器参数而仅提供了R P C ,在没有参数模型可用的情况下,有理函数模型是最佳选择。有理函数模型与多项式模型类似,不同之处在于采用多项式系数时,考虑了地面高程信息,适用于地形高差变化较小的区域。
有理函数模型对应用完全透明(不需要了解有理函数的细节就可以应用),任何传感器都可以采用,具体的模型因图像不同而异,纠正需要的相关数据容易获得,比参数模型更便于操作。采用有理函数模型加G C P ,最终产品的绝对定位精度取决于DEM、G C P和图像本身的相对定位精度。大多数的商业图像处理软件和摄影测量软件都支持有理函数模型,可以用来处理单片和立体像对。用户可以用有理函数模型进行正射校正、3 D 特征提取、D E M 生成和区域平差。局限性:处理的图像大小受限,为了达到较高的精度,需要大量的规则分布的G C P ,只能校正控制点处的误差,控制点之间的误差并不能消除;由于没有严格的物理意义,难以解释多项式函数之间潜在的相关性等。
2 . 参数模型
参数模型即严格物理模型(卫星轨道模型),被认为是最佳的图像正射校正方法,能很好地反映图像获取时的几何关系(卫星平台+ 传感器+ 地球+ 地图),可以校正由卫星平台、传感器、地球以及地图投影引起的各种误差。与上述两种方法相比,该方法精度高、稳健、一致性 好 ,需 要 的 GCP少 。对于一些没有传感器信息的数据如IKONOS G eo级产品,传感器几
何参数可以通过采集高度角、沿轨和跨轨的地面采样间隔进行估算,以便采用严格参数模型进行校正。
严格物理模型基于卫星轨道、摄影测量、测地学和地图学,模型反映了图像获取时的几何物理状态,由于基于共线方程,可以较好地表示像方空间和物方空间的转换关系,常用来纠正由于卫星、传感器、地球和地图投影等引起的变形。与非参数模型相比较,严格物理模
型需要的控制点少,一 般 情 况 下 为3〜 6 个 ,精 度 更 高 ,对于高分辨率卫星数据可以获得一两个像素的精度。PC1软件中包括了该模型。
如果仅仅处理原始图像的一部分,或图像已经经过几何纠正,或者无法获取卫星轨道信息 ,都不能采用严格物理模型。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 8
8 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)