从 KCS到 KVLCC2:船型变形揭秘
一、拟合现有船型
CAESES 中基于组件的船舶工作流(Component-Based Ship Workflow)为现代船舶设计与舰船工程中的参数化船体几何建模提供了一套结构化方法。
该方法同样支持对韩国船舶与海洋工程研究所(KRISO)开发的基准船型进行参数化拟合,包括 KCS(KRISO 集装箱船)和 KVLCC2(KRISO 超大型原油运输船)。
这些船型提供了高质量的数据集,已被广泛用于 CFD 验证、船舶水动力分析和绕流研究。CAESES 示例库中提供了这些模型的参数化版本,可用于仿真驱动的船舶设计与优化。
二、原始几何与参数化几何对比
将原始船体几何(红色)与采用 Ship Modelling Workflow 重建得到的参数化模型(绿色)的横剖线进行对比,可以看出该拟合过程具有较高精度,同时又为后续的船型探索和优化提供了参数控制能力。
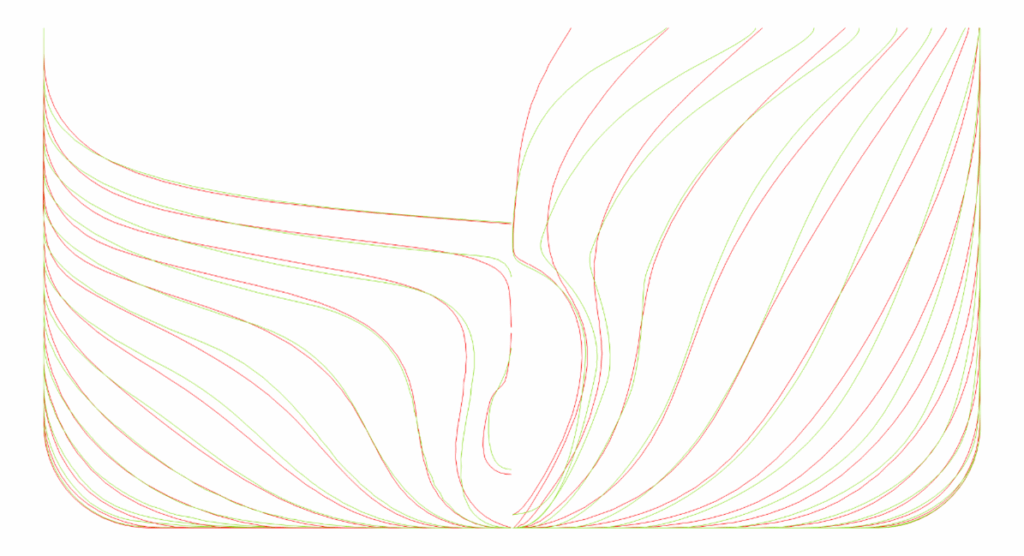
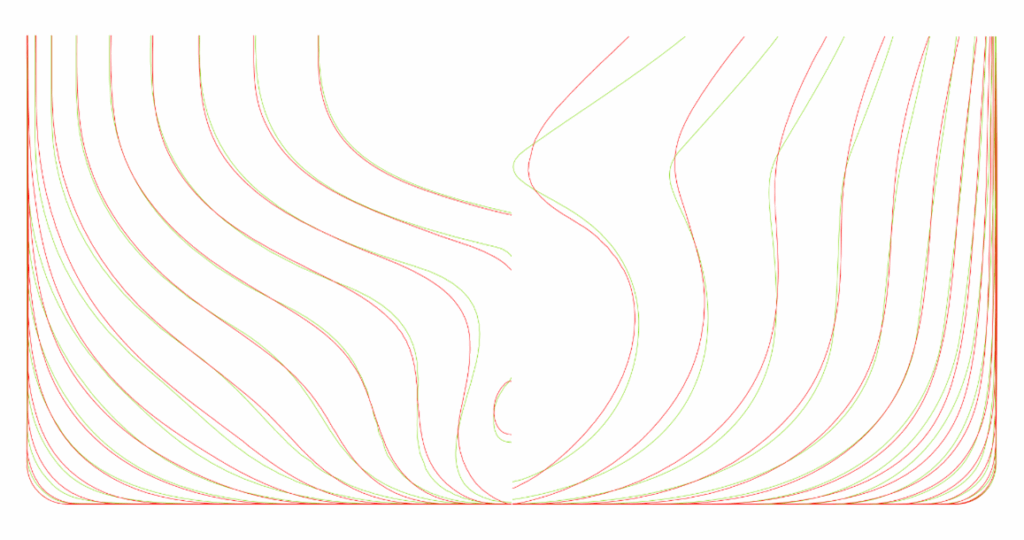
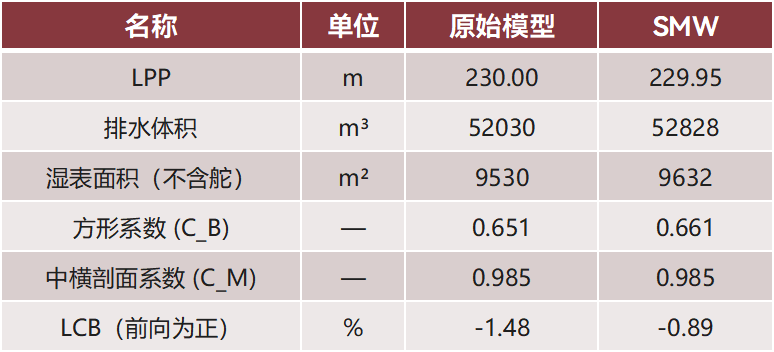
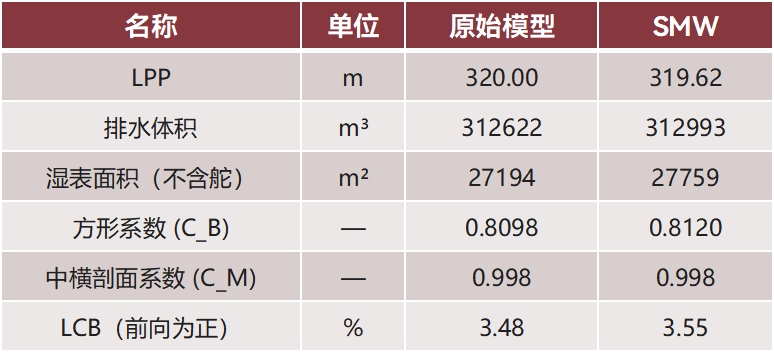
研究还对原始几何与参数化 Ship Modeling Workflow(SMW)模型的静水性能进行了对比。
三、从 KCS 到 KVLCC2
这两个参数化船体模型在 CAESES 中采用了同一套 Ship Modeling Workflow 参数化方案。
● 基于剖面的艉部(Section-Based Aftship)
● 基于水线的艏部(Waterline-Based Foreship)
● 单艉鳍(Single Skeg)
● 基础球鼻艏(Basic Bulb)
由于两种船体都由同一套参数化建模框架生成,因此尽管它们代表的是不同船型,也同属一个参数化船体设计家族。
KCS 是集装箱船,而 KVLCC2 是油船,因此两者在丰满度、比例关系以及货运能力需求上存在显著差异。
不过,借助共享的参数化结构,SMW 模型能够在这两种船型之间实现平滑的几何过渡。通过调整单个设计变量,几何形状便可从 KCS 船体连续变形到 KVLCC2 船体。
这展示了参数化船体建模的灵活性,也说明统一的参数化框架能够覆盖广泛的船型设计。
在这些动画中,还加入了舵和螺旋桨等附体,使推进系统的表达更贴近真实情况。
螺旋桨几何基于 CAESES 中的 Advanced Propeller Workflow 生成,并以 STEP 文件形式导入项目用于仿真。
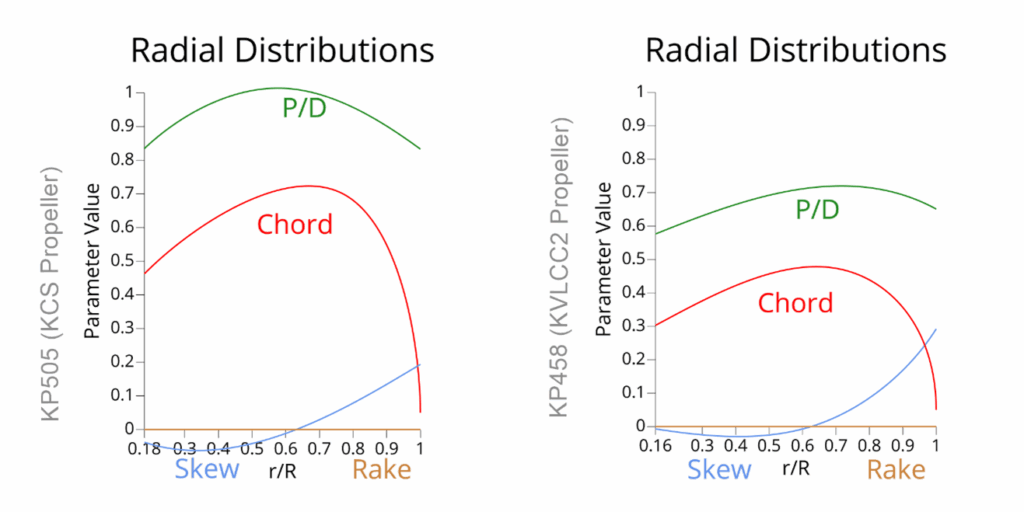
KCS 使用五叶 KP505 螺旋桨,KVLCC2 则配置四叶 KP458 螺旋桨。
两者都先在同一参数化工作流中完成设计,再集成到船模中。
下图给出了两种桨型设计参数沿半径方向的分布,用于展示它们的关键几何特征。
四、形状变形
基于这些参考模型,研究者将 Ship Modeling Workflow 参数化船体模型中识别出的参数定义为基线几何。该基线随后作为进一步定向改形的起点,以引入更多几何自由度,用于分析局部船体变化对水动力性能的影响。研究共采用了两种形状变形技术。
● 对 KCS 的球鼻艏使用自由形变(free-form deformation),在保持曲面连续性的同时实现平滑、可控的球鼻变化。这样可以系统性地探索替代球鼻艏方案,而不损害船体几何质量。
● 对 KVLCC2 船体艉部区域应用基于 RBF 的 B-Rep 变形,可直接在 CAD 模型上对艉部几何进行精确且局部的修改,并保持较高的几何保真度。
这两种方法共同展示了如何将部分参数化的变形技术应用于船体模型,以在仿真驱动设计框架下支持定向的设计探索与水动力优化。
下列动画展示了每个部分参数化模型中四个设计变量的影响。
五、与 SHIPFLOW 的联合仿真
SHIPFLOW 是一款专门用于船舶和船用螺旋桨水动力分析的计算流体力学(CFD)软件,在舰船设计领域被广泛用于预测阻力、推进性能以及船体周围流场特性。
CAESES 与 SHIPFLOW 之间具备良好的连接能力,可在参数化几何建模与水动力仿真之间实现无缝集成。
借助这一连接,在 CAESES 中创建和修改的船型可以直接传输到 SHIPFLOW,从而高效开展设计探索、自动化仿真和船舶性能优化。
六、KCS 设置:阻力仿真
原始 KCS 的设计工况对应设计吃水 10.8 m 和服务航速 24 kn,球鼻艏几何正是针对这一工况优化的。该配置被作为评估水动力性能的基线船型。
为了考察不同运行条件下的性能,研究还增加了若干场景:9.5 m 的较小吃水用于表示较轻载荷,18 kn 的慢速航行用于节能工况,以及 26 kn 的高速工况。
水动力仿真采用 SHIPFLOW 的 XPAN 求解器完成。XPAN 是船舶阻力预测和船型评估中广泛使用的势流求解器。
研究采用较细的计算网格,以捕捉船体及球鼻艏区域周围的流动特征。分析重点包括摩擦阻力(Rf)和兴波阻力(Rw)等关键阻力分量,从而了解该船在不同工况下的水动力表现。
七、KVLCC2 设置:自航仿真
KVLCC2 的基线配置对应设计吃水 20.8 m 和服务航速 15.5 kn。本研究聚焦于自航仿真,以评估船体与螺旋桨之间的相互作用。
仿真使用 SHIPFLOW 的 XCHAP 求解器,该 RANS 求解器结合了螺旋桨-船体相互作用建模与推进分析。
计算在模型尺度下采用较粗网格完成,以在可接受的计算成本下评估多个设计变体。
推进系统采用 Wageningen B 系列螺旋桨,这是一类在舰船设计与水动力研究中广泛使用的参考螺旋桨系列。
评估重点包括总阻力(RS)、轴功率/输入功率(PD)以及总推进效率(ηDS)等关键指标。
这些参数共同构成了对推进性能与能效的综合评价。
八、试验设计(DOE)
对于每个部分参数化模型,均由四个设计变量控制几何修改。研究采用 Sobol 序列抽样开展设计空间探索,以在参数空间中获得分布均匀的样本。按照 DOE 的常见经验,即每个设计变量通常取 5 到 10 个样本,本研究为每个课题共生成了 30 个设计变体。
九、KCS 阻力 DOE
研究在 18 kn 与 26 kn 两个航速下开展阻力仿真,以评估船体在不同工况中的表现。对于 30 个采样设计中的每一个,都分析了流场可视化结果,以理解几何变化对水动力效应的影响。
动画展示了压力分布、流线以及波高,从而揭示球鼻艏几何变化如何在两种工况下影响流动行为和船舶阻力。
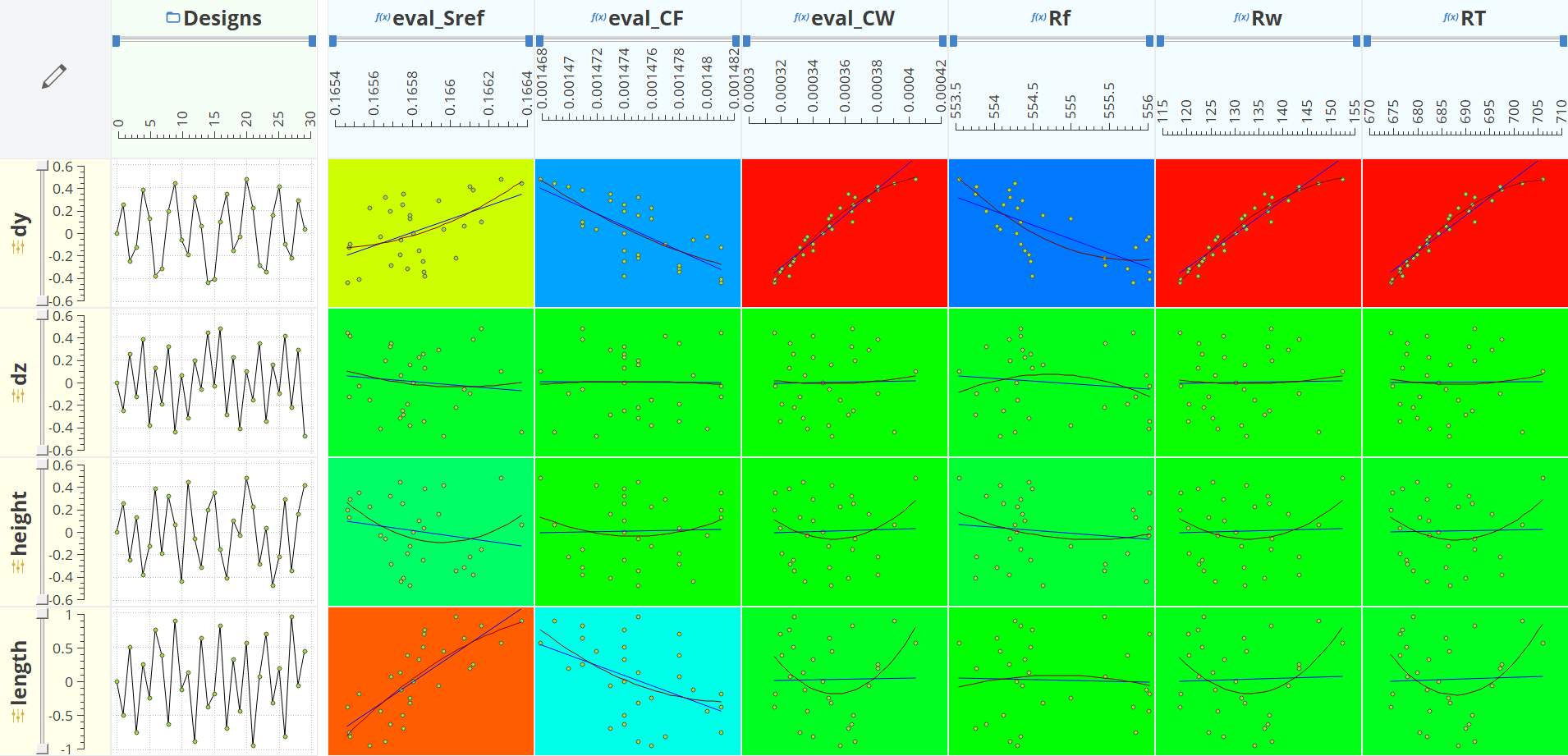
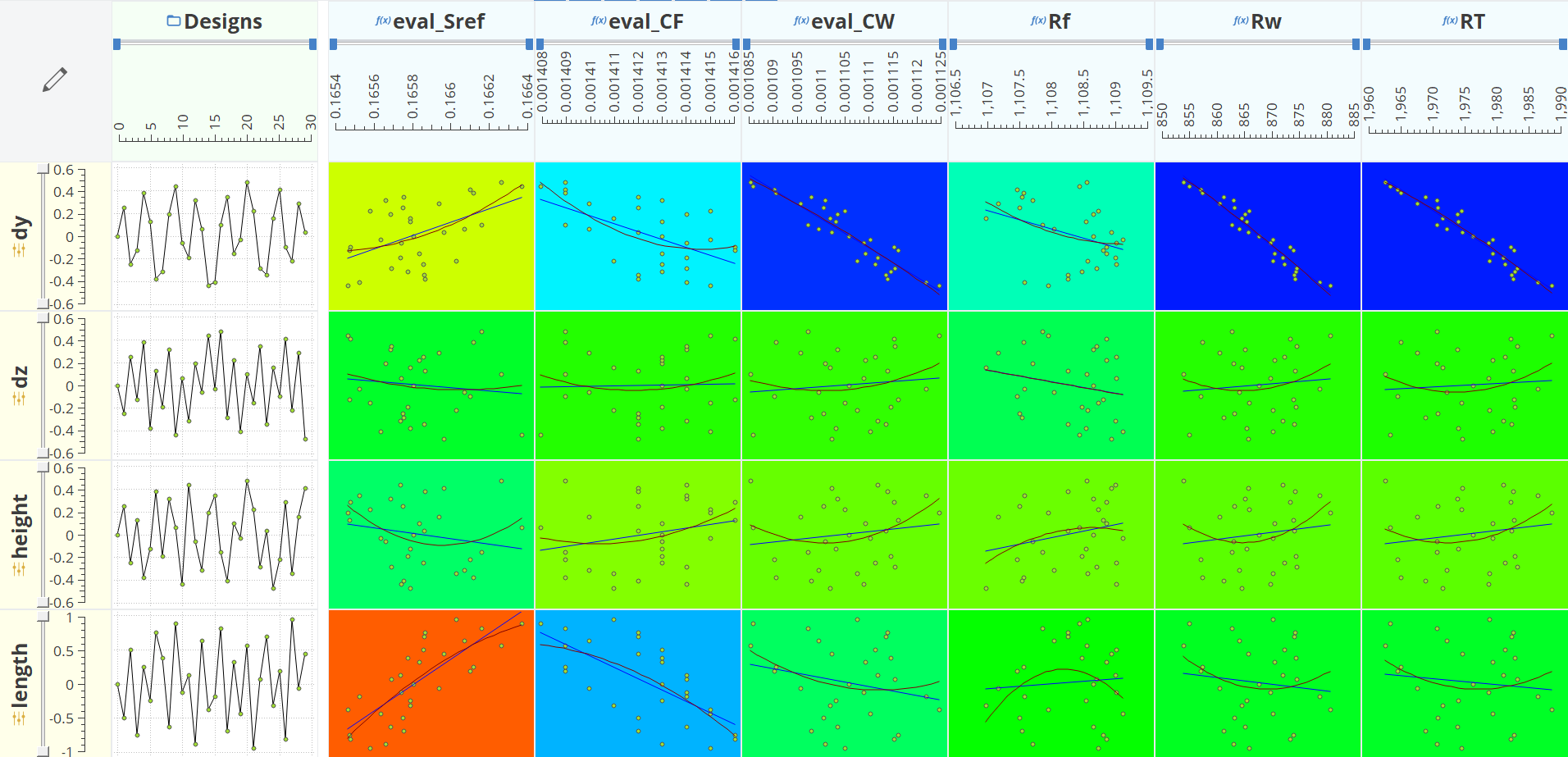
在后处理中,CAESES 的相关性分析与回归分析被用于评估设计变量对水动力性能的影响。
这些分析有助于识别参数敏感性与变化趋势,揭示各变量在所探索设计空间中对船舶阻力的作用方式。
比较两个航速下的结果,可以看到一个关键现象:航速变化会显著改变设计变量对兴波阻力的影响,这说明参数重要性会随工况而变化。这一点在动画中也能观察到。
● 18 kn时,更短、更细长的球鼻艏更有利于降低慢速航行时的兴波阻力。
● 26 kn时,设计探索则倾向于更长、更丰满的球鼻,这更适合高速运行以及相应的波系特征。
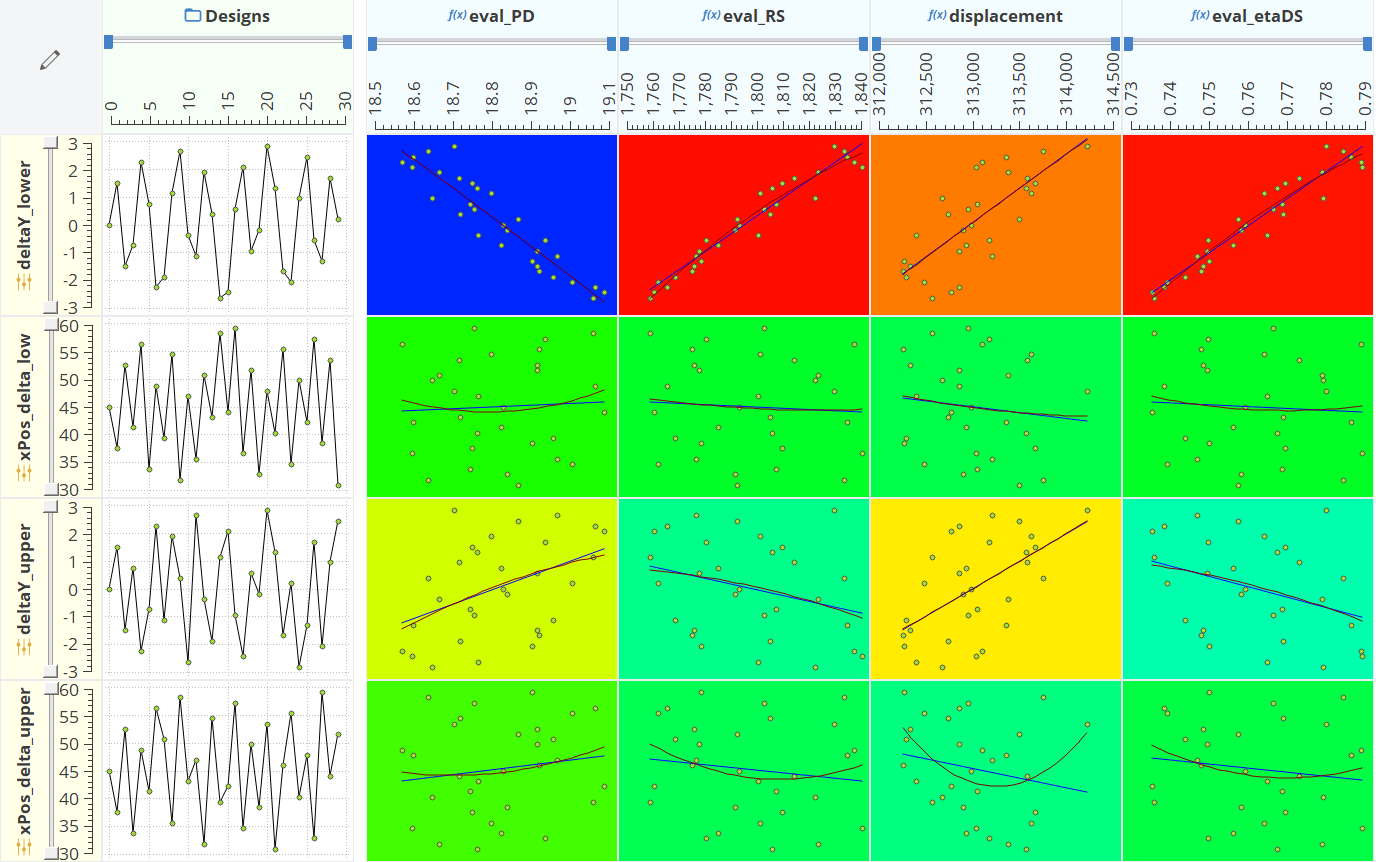
十、KVLCC2 自航 DOE
研究基于四个设计变量使用 Sobol 抽样生成了 30 个设计变体,以确保对设计空间进行均匀覆盖。
动画展示了不同设计的压力分布、流线和名义伴流。
这些可视化结果有助于分析艉部几何变化如何影响船体流动、螺旋桨来流以及整体推进性能,从而理解船舶的水动力与推进效率。
在后处理阶段,研究利用 CAESES 开展相关性分析与回归分析,系统评估设计变量对水动力性能的影响。
分析表明,艉鳍下部更宽通常会增加整船总阻力,但与此同时,总推进效率(ηD)也会有所提升。
在若干情况下,推进效率的提升幅度大于阻力增加幅度,最终表现为所需推进功率整体下降。
这种现象在一定程度上与 ITTC 外推方法的特性有关。该方法常用于模型尺度下的阻力与推进分析。
虽然它能够为设计评估提供一致的对比趋势,但阻力增加与推进效率改善之间的精确平衡,并不一定能完全代表实船尺度运行时的真实情况。
十一、结 论
本研究展示了利用 CAESES 中 Ship Modeling Workflow 进行全参数化建模的能力,并成功复现了 KCS 与 KVLCC2 等现有船型。同时,研究也应用了部分参数化建模,进一步体现了参数化方法的稳健性与效率。
CAESES 与 SHIPFLOW 的无缝集成构建了自动化的仿真驱动设计框架。阻力仿真由 XPAN 求解器完成,自航分析则由 XCHAP 执行。
结果凸显了仿真驱动设计的价值:数值仿真结合参数化建模与结构化设计探索,可以揭示船体几何与水动力性能之间复杂的关系。该方法使设计人员能够在设计早期识别最优趋势,并据此作出更有依据的决策。
研究还强调了数据驱动工程日益增长的重要性。通过管理和分析大量仿真数据,可以提炼出有意义的洞见,从而支撑更智能的设计流程以及高性能船舶更高效的开发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)