使用离散事件仿真测试基于BDI的多智能体系统(五):有效性威胁、结论与未来展望
摘要
本文是论文"Testing BDI-based multi-agent systems using discrete event simulation"深度精读系列的第五篇,也是最后一篇。在前四篇文章中,我们全面介绍了研究背景、BDI模型基础理论、仿真概念、BDI与DES集成框架设计以及原型实现与实验评估。本文将深入探讨论文的有效性威胁分析、研究结论总结,以及对未来研究方向的展望。通过对论文贡献的系统性总结和对未来工作的前瞻性分析,我们将为读者提供对这一研究领域的完整理解。
1 有效性威胁分析
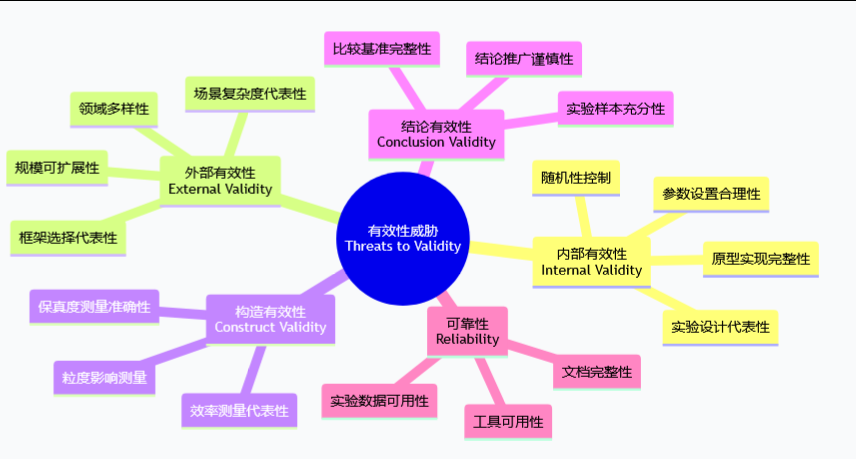
1.1 内部有效性威胁
内部有效性(Internal Validity)关注的是研究结果是否真实反映了所研究的因果关系,而不是由其他混淆因素导致的。论文作者识别了以下内部有效性威胁:
原型实现的完整性威胁。论文的原型实现是基于JaKtA和Alchemist的集成,但这两个工具都在持续发展中。原型可能没有完全实现所有BDI特性或所有DES功能,这可能影响实验结果的完整性。例如,原型主要支持粗粒度和中粒度映射,细粒度映射的支持有限。此外,某些高级BDI特性(如计划失败处理、目标审议策略)可能没有完全实现。为了缓解这一威胁,作者选择了相对简单的多无人机场景,确保场景中的所有特性都被原型支持。
实验设计的代表性威胁。论文使用多无人机协调场景作为验证案例,这是一个相对特定的应用场景。实验结果可能无法推广到其他类型的MAS应用,如社会仿真、电子商务、或网络安全等。不同应用场景可能有不同的时序约束、协调需求和性能指标。为了缓解这一威胁,作者在场景设计中考虑了多种MAS常见特性,如并发执行、消息传递、环境感知等,使得场景具有一定的代表性。
参数设置的合理性威胁。仿真结果可能受到参数设置的影响,如控制循环周期、通信延迟、感知范围等。不合理的参数设置可能导致仿真结果偏离真实情况。论文作者基于文献调研和专家经验设置参数,但承认参数设置可能存在偏差。为了缓解这一威胁,作者进行了参数敏感性分析,展示了不同参数设置下的仿真结果差异。
随机性的控制威胁。仿真中存在多个随机因素,如初始位置分布、事件处理顺序等。如果随机性控制不当,可能导致仿真结果不可重现。论文作者通过固定随机种子来控制随机性,确保相同条件下的仿真结果一致。然而,这也可能限制了仿真结果的多样性,无法完全反映真实系统的随机行为。
1.2 外部有效性威胁
外部有效性(External Validity)关注的是研究结果是否可以推广到其他情境。论文作者识别了以下外部有效性威胁:
框架选择的代表性威胁。论文选择JaKtA作为BDI框架,Alchemist作为DES仿真器。这两个工具都有其特定的设计理念和实现方式,可能无法代表所有BDI框架或DES仿真器。其他BDI框架(如Jason、GOAL、Jadex)或其他DES仿真器(如Mason、Repast)可能有不同的特性,集成方案可能需要调整。为了缓解这一威胁,作者在论文中详细分析了JaKtA和Alchemist的设计特点,讨论了集成方案的通用性,指出关键抽象可以应用于其他框架和仿真器。
场景复杂度的代表性威胁。论文使用的多无人机协调场景虽然包含多种MAS特性,但相对简化。真实世界的MAS应用可能更加复杂,涉及更多智能体、更复杂的环境、更丰富的交互模式等。例如,真实无人机系统可能需要考虑电池限制、风的影响、法规约束等因素。为了缓解这一威胁,作者讨论了如何将集成方案扩展到更复杂的场景,如添加更详细的环境模型、支持更多智能体类型等。
规模的可扩展性威胁。论文的实验规模相对有限,最多测试了50架无人机。真实世界的MAS可能涉及数百甚至数千个智能体,仿真性能可能成为瓶颈。为了缓解这一威胁,作者分析了可扩展性瓶颈,讨论了优化策略,如使用空间索引、分布式仿真等。
领域的多样性威胁。论文聚焦于无人机协调领域,这是一个典型的MAS应用领域。然而,MAS还应用于许多其他领域,如智能制造、医疗保健、金融交易等。不同领域可能有不同的需求和约束,集成方案的适用性可能需要验证。为了缓解这一威胁,作者在论文中讨论了集成方案的通用性,指出核心抽象和方法可以应用于其他领域。
1.3 构造有效性威胁
构造有效性(Construct Validity)关注的是研究是否正确测量了想要测量的概念。论文作者识别了以下构造有效性威胁:
保真度测量的准确性威胁。论文使用仿真结果与预期行为的比较来评估仿真保真度。然而,"预期行为"本身是一个主观概念,可能受到研究者偏见的影响。此外,保真度是一个多维概念,包括环境保真度、智能体保真度、交互保真度等,论文可能没有全面测量所有维度。为了缓解这一威胁,作者定义了明确的评估指标,如任务完成时间、协调冲突次数等,使得评估更加客观。
粒度影响的测量威胁。论文比较了不同粒度级别的仿真结果,但粒度影响可能不仅限于论文测量的指标。例如,细粒度映射可能提供更好的调试能力,但论文没有量化评估这一方面。为了缓解这一威胁,作者在讨论中分析了粒度选择的多方面影响,包括保真度、效率、调试能力等。
效率测量的代表性威胁。论文使用仿真执行时间作为效率指标,但效率还包括其他方面,如内存使用、事件处理吞吐量等。此外,仿真效率可能受到硬件配置、软件版本等因素影响。为了缓解这一威胁,作者在实验中控制了硬件和软件环境,确保比较的公平性。
1.4 结论有效性威胁
结论有效性(Conclusion Validity)关注的是研究结论是否基于充分的数据和分析。论文作者识别了以下结论有效性威胁:
实验样本的充分性威胁。论文的实验数量相对有限,每种配置可能只运行了少数几次。统计显著性可能不足,结论可能受到随机波动影响。为了缓解这一威胁,作者使用固定随机种子确保可重现性,并在讨论中承认实验的局限性。
比较基准的完整性威胁。论文主要比较了不同粒度级别的仿真结果,但没有与其他仿真方法(如基于Agent的仿真、连续时间仿真)进行系统比较。这可能限制了对集成方案优势的全面评估。为了缓解这一威胁,作者在相关工作部分分析了其他仿真方法的特点,讨论了DES方法的相对优势。
结论推广的谨慎性威胁。论文的结论基于特定实验条件,推广到其他条件时需要谨慎。例如,关于粒度选择的建议可能不适用于所有应用场景。为了缓解这一威胁,作者在结论中明确指出了结论的适用范围和局限性。
1.5 可靠性威胁
可靠性(Reliability)关注的是研究是否可以被重复验证。论文作者识别了以下可靠性威胁:
工具可用性威胁。论文的原型实现依赖于JaKtA和Alchemist两个开源工具。如果这些工具不可用或版本不兼容,可能影响研究的可重复性。为了缓解这一威胁,作者提供了工具的GitHub链接,确保读者可以获取工具。
实验数据可用性威胁。论文的实验数据和配置文件是否公开可能影响研究的可重复性。如果读者无法获取原始数据,可能无法验证实验结果。为了缓解这一威胁,作者承诺在论文接受后公开实验数据和配置文件。
文档完整性威胁。集成方案的实现细节是否充分文档化可能影响研究的可重复性。如果文档不完整,读者可能无法复现集成方案。为了缓解这一威胁,作者在论文中详细描述了集成方案的设计和实现,并在附录中提供了关键代码片段。
2 研究结论总结
2.1 主要贡献回顾
论文的主要贡献可以总结为以下几个方面:
贡献一:概念贡献——识别DES作为BDI系统仿真的关键使能者。论文论证了DES与BDI智能体执行模型之间的内在契合,指出DES是仿真BDI系统的一种自然且稳健的方式。这一洞察为BDI系统仿真提供了新的视角,有助于研究者选择合适的仿真方法。
贡献二:分析贡献——识别BDI到DES映射的关键挑战。论文系统性地分析了将BDI智能体映射到DES仿真器时出现的关键挑战,包括控制循环粒度、时间建模、并发建模等方面。这些分析为设计集成方案提供了指导,帮助开发者避免常见陷阱。
贡献三:设计贡献——提出可移植BDI规范的框架设计要求。论文讨论了BDI框架应提供哪些抽象,以便与仿真引擎无缝集成,使相同的规范可以在仿真和真实世界部署中执行。这些设计要求可以指导BDI框架开发者设计更灵活的框架。
贡献四:实现贡献——实现开源原型。论文实现了基于JaKtA和Alchemist的原型集成,证明了方法的可行性,并为社区提供了可用的工具。原型实现可以作为其他集成项目的参考。
贡献五:实证贡献——验证方法的有效性。论文通过多无人机协调场景验证了原型实现,展示了不同粒度级别的影响,为方法的有效性提供了实证支持。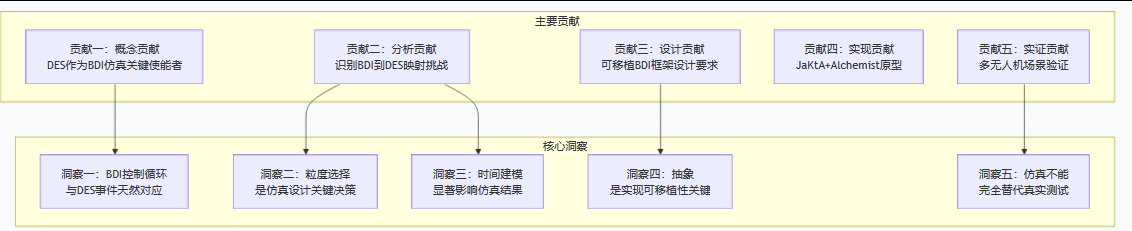
2.2 核心洞察总结
论文提供了以下核心洞察:
洞察一:BDI控制循环与DES事件的天然对应关系。BDI智能体的控制循环本质上是事件驱动的,每个控制循环迭代可以被视为对事件的响应。这种特性使得BDI智能体与DES仿真器之间存在天然的对应关系,为集成提供了理论基础。
洞察二:粒度选择是仿真设计的关键决策。不同的粒度级别导致不同的仿真特性,开发者需要根据仿真目的选择合适的粒度。粗粒度映射适合快速验证,中粒度映射适合性能分析,细粒度映射适合详细调试。
洞察三:时间建模对仿真结果有显著影响。不准确的时间建模可能导致仿真结果偏离真实情况。开发者应该基于对真实系统的理解设计时间模型,包括控制循环周期、操作时间、通信延迟等。
洞察四:抽象是实现可移植性的关键。通过时间抽象、环境抽象和执行抽象,智能体规范可以在仿真和真实部署之间移植,而不需要修改代码。这降低了开发成本,提高了开发效率。
洞察五:仿真不能完全替代真实测试。虽然仿真提供了有价值的测试和验证手段,但仿真结果不能完全替代真实部署测试。开发者应该采用渐进式验证策略,从仿真测试逐步过渡到真实部署。
2.3 方法论贡献
论文在方法论上也有重要贡献:
方法论贡献一:系统性文献综述。论文对BDI仿真方法进行了系统性综述,分类分析了现有方法的特点和局限性,为研究者提供了全面的文献参考。
方法论贡献二:设计空间分析。论文系统分析了BDI到DES映射的设计空间,包括粒度级别、时间建模、并发建模等维度,为设计决策提供了框架。
方法论贡献三:原型验证方法。论文展示了如何通过原型实现和实验验证来评估设计方案,为类似研究提供了方法论参考。
2.4 实践意义
论文的研究成果具有重要的实践意义:
对BDI框架开发者的意义:论文提出的设计要求可以指导BDI框架开发者设计更灵活的框架,支持仿真和真实部署之间的可移植性。
对MAS应用开发者的意义:论文的原型实现为MAS应用开发者提供了可用的工具链,可以在仿真环境中快速迭代智能体设计,降低开发成本和风险。
对仿真工具开发者的意义:论文的集成方案可以为仿真工具开发者提供参考,帮助他们设计支持BDI智能体的仿真器。
对研究者的意义:论文的系统分析和实验结果可以为研究者提供参考,帮助他们选择合适的仿真方法和参数设置。
3 未来研究方向
3.1 技术扩展方向
论文提出了多个技术扩展方向:
方向一:细粒度映射的完整支持。论文的原型主要支持粗粒度和中粒度映射,细粒度映射的支持有限。未来工作可以实现完整的细粒度映射,支持操作级别的事件生成和处理。这将提供更高的仿真保真度,支持更详细的调试和分析。
方向二:更多BDI框架的支持。论文的原型基于JaKtA框架,未来工作可以将集成方案扩展到其他BDI框架,如Jason、GOAL、Jadex等。这将验证集成方案的通用性,扩大方法的适用范围。
方向三:更多DES仿真器的支持。论文的原型基于Alchemist仿真器,未来工作可以将集成方案扩展到其他DES仿真器,如Mason、Repast等。这将验证集成方案的灵活性,为开发者提供更多选择。
方向四:分布式仿真支持。论文的原型是单机仿真,未来工作可以扩展到分布式仿真,支持大规模MAS的仿真。这将解决可扩展性问题,支持数百甚至数千智能体的仿真。
方向五:实时仿真支持。论文的原型是虚拟时间仿真,未来工作可以扩展到实时仿真,支持硬件在环测试。这将缩小仿真与真实部署之间的差距,提高仿真结果的可信度。
3.2 应用扩展方向
论文还提出了多个应用扩展方向:
方向一:更多应用领域的验证。论文使用多无人机协调场景验证原型,未来工作可以在其他应用领域验证,如智能制造、医疗保健、金融交易等。这将验证方法的广泛适用性。
方向二:复杂环境建模。论文的环境模型相对简单,未来工作可以支持更复杂的环境建模,如三维空间、动态障碍物、环境不确定性等。这将提高仿真保真度,支持更真实的应用场景。
方向三:人机交互建模。论文的智能体是纯软件智能体,未来工作可以支持人机交互建模,如人类操作员的决策过程、人机协作模式等。这将支持社会技术系统的仿真。
方向四:机器学习集成。论文的智能体使用规则式计划,未来工作可以集成机器学习技术,如强化学习、深度学习等。这将支持更智能的智能体行为,适应更复杂的环境。
3.3 理论研究方向
论文还提出了多个理论研究方向:
方向一:保真度量化理论。论文定性地讨论了仿真保真度,未来工作可以发展保真度的量化理论,提供客观的保真度度量方法。这将帮助开发者评估仿真质量,做出更好的设计决策。
方向二:粒度选择理论。论文基于实验分析了粒度选择的影响,未来工作可以发展粒度选择的理论框架,提供基于应用特征的粒度选择指导。这将帮助开发者选择合适的粒度级别。
方向三:时间建模理论。论文讨论了时间建模的影响,未来工作可以发展时间建模的理论框架,提供基于真实系统特性的时间模型设计方法。这将提高仿真时间建模的准确性。
方向四:现实鸿沟理论。论文提到了现实鸿沟问题,未来工作可以深入研究BDI系统仿真中的现实鸿沟,发展跨越现实鸿沟的方法。这将提高仿真结果的可信度。
3.4 工具发展方向
论文还提出了工具发展的方向:
方向一:可视化工具增强。论文的原型使用Alchemist的可视化功能,未来工作可以开发专门的BDI智能体可视化工具,支持信念、目标、意图等认知状态的可视化。这将提高调试效率。
方向二:调试工具增强。论文的原型支持基本的调试功能,未来工作可以开发更强大的调试工具,支持断点设置、状态检查、事件追踪等。这将提高开发效率。
方向三:测试自动化工具。论文的原型支持手动测试,未来工作可以开发测试自动化工具,支持测试用例生成、自动执行、结果验证等。这将提高测试效率。
方向四:性能分析工具。论文的原型支持基本的性能测量,未来工作可以开发专门的性能分析工具,支持性能瓶颈识别、优化建议生成等。这将帮助开发者优化系统性能。
4 研究启示与思考
4.1 对MAS开发的启示
论文的研究对MAS开发有以下启示:
启示一:仿真优先的开发策略。论文展示了仿真在MAS开发中的价值,建议开发者采用仿真优先的开发策略。在真实部署之前,开发者可以在仿真环境中充分测试智能体行为,发现和修复问题,降低部署风险。
启示二:抽象设计的重要性。论文强调了抽象设计对可移植性的重要性,建议BDI框架开发者在设计框架时考虑仿真支持,提供时间、环境和执行抽象接口。这将提高框架的灵活性和可用性。
启示三:粒度选择的权衡思维。论文展示了不同粒度级别的权衡,建议开发者在选择粒度时考虑仿真目的、效率和保真度等因素。没有一种粒度级别适合所有场景,开发者需要根据具体情况做出选择。
启示四:渐进式验证的必要性。论文指出了仿真的局限性,建议开发者采用渐进式验证策略。仿真测试只是验证过程的一部分,开发者还需要进行真实环境测试,确保系统在真实条件下的正确性。
4.2 对仿真研究的启示
论文的研究对仿真研究有以下启示:
启示一:认知智能体仿真的挑战。论文展示了认知智能体(如BDI智能体)仿真的独特挑战,与传统基于Agent的仿真不同。认知智能体的内部状态(信念、目标、意图)和行为决策过程需要被准确建模,这增加了仿真的复杂性。
启示二:跨领域方法迁移的价值。论文将DES方法应用于BDI系统仿真,展示了跨领域方法迁移的价值。研究者可以关注其他领域的方法,探索其在MAS仿真中的应用。
启示三:开源工具的重要性。论文的原型基于开源工具JaKtA和Alchemist,展示了开源工具对研究的促进作用。研究者应该积极参与开源社区,贡献和使用开源工具。
启示四:实证验证的必要性。论文通过实验验证了方法的有效性,展示了实证验证的必要性。研究者应该重视实验验证,提供充分的实证支持。
4.3 对未来研究的思考
基于论文的研究,我们可以对未来研究进行以下思考:
思考一:仿真与AI的结合。随着人工智能技术的发展,如何将AI技术与仿真结合是一个有趣的研究方向。例如,可以使用机器学习技术自动优化仿真参数,或使用AI智能体作为仿真中的对手或协作者。
思考二:数字孪生的应用。数字孪生(Digital Twin)是物理系统的虚拟副本,可以用于监控、分析和优化。BDI智能体仿真可以与数字孪生技术结合,实现更智能的系统管理和决策支持。
思考三:形式化验证的集成。形式化验证可以提供数学上的正确性保证,与仿真测试互补。未来研究可以探索将形式化验证与BDI仿真结合,提供更全面的验证手段。
思考四:人机协作的仿真。随着人机协作系统的发展,如何仿真人类行为成为一个重要问题。未来研究可以探索将人类行为模型集成到BDI仿真中,支持人机协作系统的设计和验证。
5 总结
5.1 论文价值总结
本论文在BDI多智能体系统仿真领域做出了重要贡献。通过深入分析BDI智能体的执行模型和DES仿真器的特性,论文论证了两者之间的天然契合,提出了将BDI控制循环映射到DES事件的方法论,并实现了开源原型验证方法的可行性。论文的研究成果为MAS开发者提供了有价值的工具和方法,为研究者提供了系统的文献综述和分析框架,为BDI框架开发者提供了设计指导。
论文的价值不仅在于技术贡献,还在于方法论贡献。论文展示了如何通过系统性分析、原型实现和实验验证来研究复杂的技术问题,为类似研究提供了方法论参考。论文还展示了开源协作的价值,通过使用和贡献开源工具,加速了研究进展。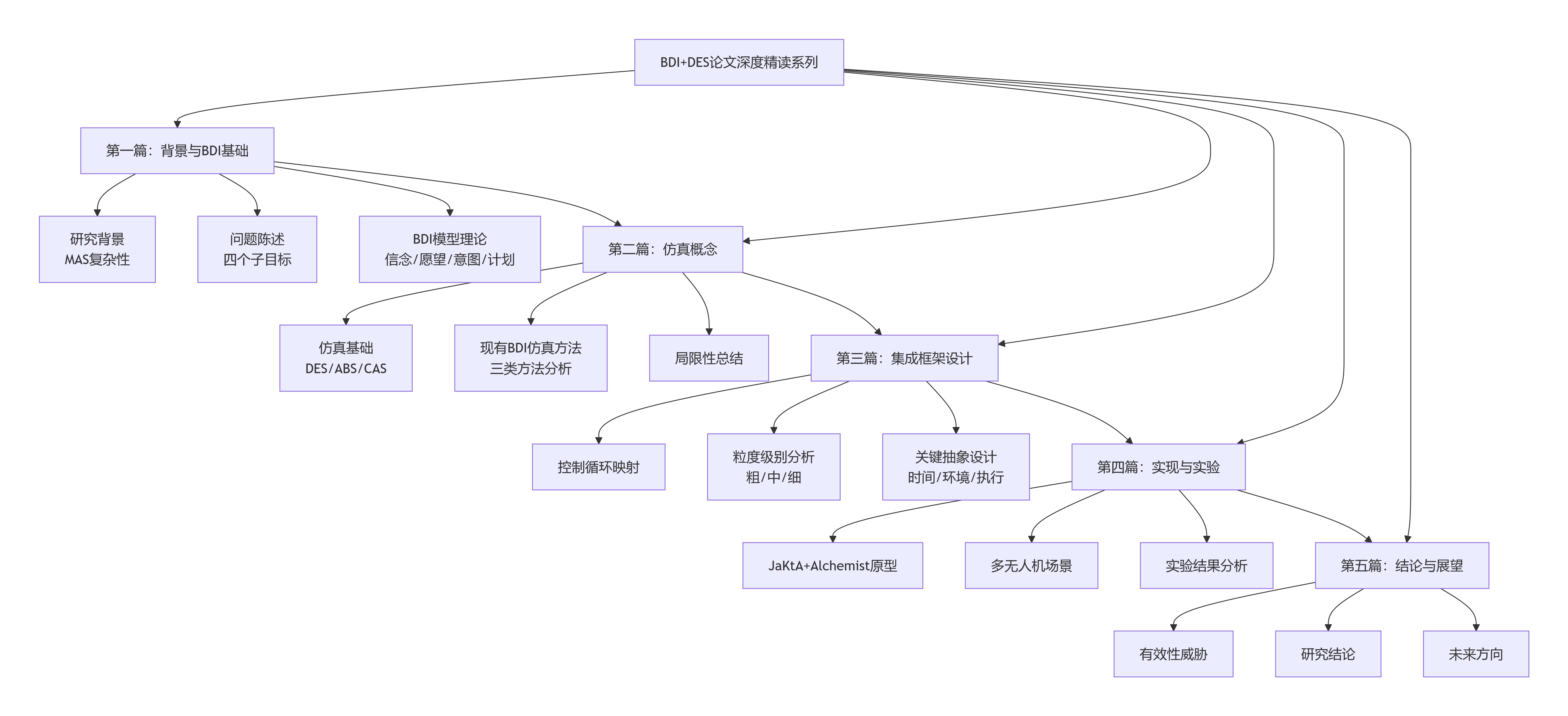
5.2 系列精读总结
本系列精读文章全面深入地解读了论文"Testing BDI-based multi-agent systems using discrete event simulation"。第一篇介绍了研究背景和BDI模型基础理论,为理解论文奠定了知识基础。第二篇深入探讨了仿真概念和现有BDI仿真方法,分析了现有方法的局限性。第三篇详细阐述了BDI与DES集成框架的设计原理,包括控制循环映射、粒度级别分析和关键抽象设计。第四篇介绍了原型实现细节和实验评估结果,展示了方法的有效性。第五篇分析了有效性威胁,总结了研究结论,展望了未来研究方向。
通过这五篇精读文章,读者可以全面理解论文的研究背景、技术贡献、实验验证和未来展望,获得对BDI多智能体系统仿真领域的深入认识。希望本系列精读能够为MAS研究者和开发者提供有价值的参考,促进该领域的进一步发展。
本系列精读文章到此结束。感谢您的阅读!
文献来源:Baiardi, M., Burattini, S., Ciatto, G., & Pianini, D. (2026). Testing BDI-based multi-agent systems using discrete event simulation. Autonomous Agents and Multi-Agent Systems, 40(18). https://doi.org/10.1007/s10458-026-09744-w

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 1
1 0
0- 0



 已为社区贡献94条内容
已为社区贡献94条内容

所有评论(0)