FreeRTOS是什么?
FreeRTOS 是嵌入式领域中最著名的实时操作系统(RTOS)内核。(Real Time Operation System)。
FreeRTOS的定义
FreeRTOS(Free Real-Time Operating System)是一个开源的嵌入式实时操作系统(RTOS),专为资源有限的微控制器和嵌入式设备设计。它提供任务调度、任务间通信和同步机制,支持多任务并发执行。FreeRTOS的核心特点是小巧高效,文件数量较少(例如,相比uC/OS更精简),便于在内存和处理能力受限的环境中部署。
如果说裸机开发(如 while(1))是让单片机“单线程”地工作,那么 FreeRTOS 就是给单片机装上了一个“超级大脑”,让它能同时处理多个任务,并且保证关键任务能优先、准时地完成。
FreeRTOS 是从“初级嵌入式工程师”迈向“中高级系统工程师”的必经之路。以下是关于 FreeRTOS 的核心解析:
-
核心概念:它是什么?
-
名字含义:Free(免费、开源)+ RTOS(实时操作系统)。
-
定位:它是一个轻量级的调度器。它不负责管理复杂的文件系统或图形界面(虽然有扩展组件),它的核心职责是管理 CPU 的时间片,决定哪个任务在什么时候运行。
-
现状:由亚马逊(AWS)维护,采用 MIT 开源协议,这意味着你可以免费将其用于商业产品,无需公开你的私有代码。
-
为什么需要 FreeRTOS?(解决什么痛点)
在裸机开发中,如果有一个任务卡住了(比如死循环等待传感器),整个系统就会瘫痪。FreeRTOS 通过以下机制解决了这个问题:
-
多任务并发:

-
裸机:
while(1)里必须轮流处理按键、显示、通信,很难平衡。 -
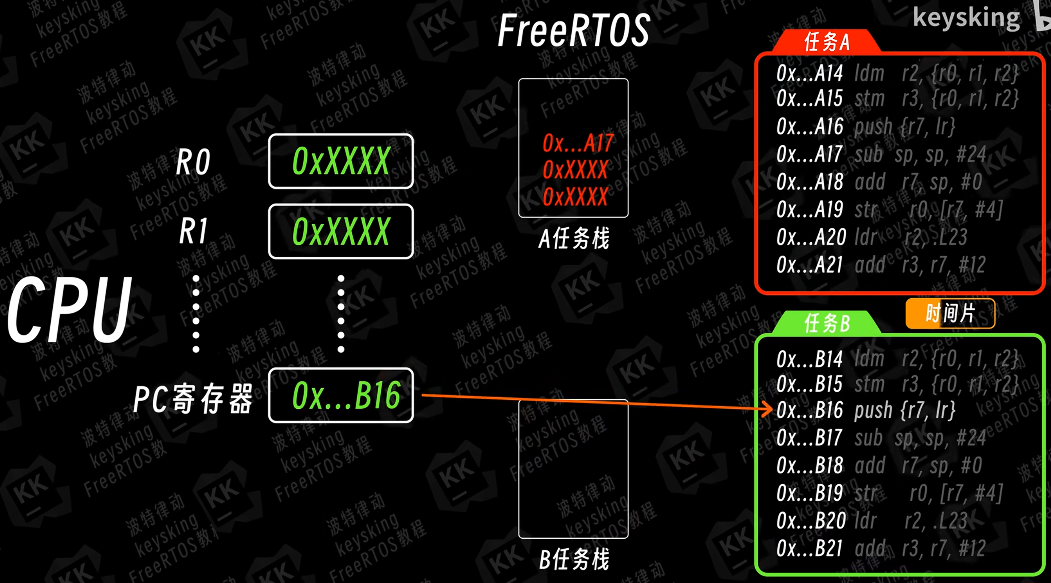
FreeRTOS:你可以创建任务 A(负责按键)、任务 B(负责显示)、任务 C(负责通信)。RTOS 会根据优先级,极快地在它们之间切换(毫秒级),看起来就像它们在同时运行。
-
-
实时性(抢占式调度):
-
这是 RTOS 的灵魂。如果任务 A 是低优先级的(如刷新屏幕),任务 B 是高优先级的(如电机急停),当 B 就绪时,FreeRTOS 会立即暂停 A,把 CPU 交给 B。这保证了关键时刻系统绝不掉链子。
-
-
资源管理:
-
当多个任务都要用串口打印数据时,裸机容易乱码。FreeRTOS 提供了互斥量(Mutex)和信号量(Semaphore),像“红绿灯”一样协调资源的使用。
-
关键特性总结:
-
实时性:FreeRTOS支持抢占式调度(高优先级任务可中断低优先级任务)、合作式调度(任务主动释放CPU)和时间片调度(任务按固定时间片轮流执行),确保关键任务及时响应。
-
多任务管理:所有任务挂载在一个双向循环链表上,操作系统负责管理任务的创建、切换和删除。
-
通信与同步:提供任务通知、消息队列、二值信号量、数值型信号量、递归互斥信号量和互斥信号量等机制,用于任务间或任务与中断间的数据交换和同步。
-
免费与开源:FreeRTOS是免费的,许多半导体厂商(如STMicroelectronics)在其SDK包中直接集成,尤其适用于WIFI、蓝牙等带协议栈的芯片。
-
易用性与移植性:文档齐全,上手简单;已移植到多种微处理器架构(如STM32的F1/F3/F4/F7系列),市场占有量高。硬件接口代码通常位于特定文件中(如
FreeRTOS/source/portable/[编译器]/[微控制器]/port.c)。
-
FreeRTOS 的核心组件
学习 FreeRTOS,主要就是要掌握以下几个“工具”:
| 组件 | 作用 | 形象比喻 |
| 任务 (Task) | 程序的基本执行单元,每个任务有自己的堆栈和优先级。 | 公司里的员工,每人负责一项具体工作。 |
| 调度器 (Scheduler) | 决定哪个任务运行、哪个任务等待的核心算法。 | 公司的经理,分配工作并处理插队情况。 |
| 队列 (Queue) | 任务间传递数据的通道(FIFO)。 | 员工之间的传纸条或信箱,安全传递信息。 |
| 信号量 (Semaphore) | 用于同步或资源保护。 | 钥匙(互斥量)或红绿灯,防止多人抢一个资源。 |
| 软件定时器 | 在指定时间后执行某个函数。 | 厨房里的计时器,时间到就响铃(触发回调)。 |
-
学习 FreeRTOS 的路线图
建议在熟练掌握 STM32 裸机开发(GPIO、中断、串口、DMA)之后再开始学习。
第一步:移植与跑通
-
不要从零写内核,去官网或 GitHub 下载源码。
-
在你的 STM32 工程中加入 FreeRTOS 源码(
tasks.c,list.c,queue.c等核心文件)。 -
配置
FreeRTOSConfig.h(设置时钟、优先级数量等)。 -
目标:创建两个 LED 闪烁任务,让它们以不同的频率闪烁,证明多任务跑起来了。
第二步:理解任务状态
-
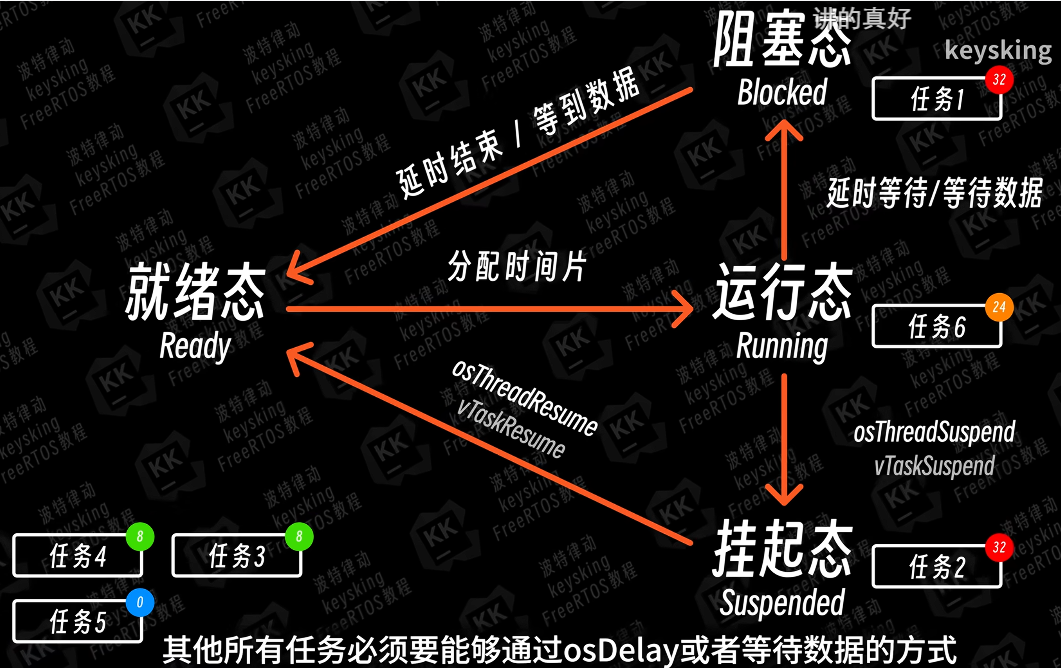
理解任务的 4 种状态:运行态(Running)、就绪态(Ready)、阻塞态(Blocked)、挂起态(Suspended)。
-
关键点:理解为什么调用
vTaskDelay()会让任务进入“阻塞态”,从而释放 CPU 给其他任务(这是 RTOS 省电和高效的关键)。
第三步:掌握通信机制
-
队列:尝试用任务 A 采集传感器数据,通过队列发给任务 B,任务 B 负责通过串口打印。

-
互斥量:模拟两个任务同时操作同一个全局变量,不加锁会怎样?加上互斥锁又会怎样?
在FreeRTOS中,多个任务同时操作同一个全局变量时,如果不使用同步机制,可能导致数据竞争和不可预测的结果;而添加互斥锁(mutex)可以有效保护共享资源。逐步分析不加锁和加互斥锁的具体情况,基于FreeRTOS的实现机制。
1. 不加互斥锁的情况
当两个任务(例如Task A和Task B)同时访问一个全局变量(如int counter = 0;)时,由于FreeRTOS支持任务抢占(高优先级任务可中断低优先级任务),可能出现竞争条件(race condition):
-
典型问题:任务操作非原子(不可中断),例如
counter++(等价于counter = counter + 1)涉及读、加、写三个步骤。如果一个任务在执行中途被抢占,另一个任务修改counter,会导致数据不一致。-
示例场景:
-
Task A(低优先级)读取
counter=0。 -
Task B(高优先级)抢占,读取
counter=0,写入counter=1。 -
Task A恢复,基于旧值
0写入counter=1(正确值应为2)。最终counter错误为1,而非预期值2。
-
-
-
后果:变量值不可靠,可能导致系统崩溃、数据损坏或逻辑错误。这在实时系统中尤其危险,例如在传感器数据处理或状态机中。
-
根本原因:无同步机制时,任务执行顺序不确定,高优先级任务可随时中断低优先级任务。
2. 加互斥锁的情况
在FreeRTOS中,互斥锁通过二进制信号量实现(API如xSemaphoreCreateMutex()),但增加了优先级继承机制,以解决不加锁的问题:
-
工作机制:
-
任务在访问共享变量前调用
xSemaphoreTake(mutex, timeout)获取锁。如果锁已被占用,任务进入阻塞状态。 -
访问完成后调用
xSemaphoreGive(mutex)释放锁。 -
例如:
SemaphoreHandle_t mutex = xSemaphoreCreateMutex(); // 创建互斥锁 void TaskA(void *pvParameters) { if (xSemaphoreTake(mutex, portMAX_DELAY) == pdTRUE) { counter++; // 安全操作 xSemaphoreGive(mutex); } vTaskDelay(1); // 模拟其他操作 } // TaskB 代码类似
-
-
优先级继承机制:
-
当低优先级任务(如Task A)持有锁时,如果高优先级任务(如Task B)尝试获取锁,系统临时提升Task A的优先级到与Task B相同。
-
例如:Task A(优先级1)持有锁 → Task B(优先级3)等待锁 → Task A优先级被提升到3 → Task A快速完成操作并释放锁 → Task A优先级恢复为1。
-
-
优点:防止优先级翻转(中等优先级任务抢占低优先级任务导致高优先级任务无限期阻塞),确保高优先级任务等待时间最短。
-
-
后果:共享变量操作安全,数据一致性强。但引入少量开销(锁获取/释放时间),在实时系统中需优化超时设置。
3. 关键对比总结
|
方面 |
不加互斥锁 |
加互斥锁(带优先级继承) |
|
数据一致性 |
低(可能值错误或损坏) |
高(操作原子化) |
|
可靠性 |
不可靠(系统可能崩溃) |
可靠(资源独占访问) |
|
优先级影响 |
高优先级任务可能导致数据竞争 |
优先级继承避免翻转 |
|
性能开销 |
无额外开销 |
少量延迟(锁管理) |
|
适用场景 |
仅适用于只读操作或单任务系统 |
多任务共享写入场景(如全局计数器) |
4. 实际建议
-
何时加锁:任何写入操作(如
x++、x=y)或复合操作(读-改-写)必须加互斥锁。 -
优化:避免在锁内执行耗时操作(如
vTaskDelay()),以减少阻塞时间。FreeRTOS互斥锁比普通二值信号量更安全,因为它内置优先级继承。
通过合理使用互斥锁,可以确保嵌入式系统的稳定性和数据完整性。
第四步:实战项目
-
综合案例:做一个“智能温控风扇”。
-
任务1(高优先级):读取温度传感器(I2C)。
-
任务2(中优先级):根据温度调整 PWM 占空比(电机控制)。
-
任务3(低优先级):OLED 屏幕刷新显示。
-
任务4(低优先级):处理按键输入。
-
-
常见误区与建议
-
不要过度设计:如果你的项目只是简单的点灯或读取一个传感器,裸机(
while(1))就够了,上 RTOS 反而增加资源消耗(RAM 占用会增加几 KB)。 -
堆栈溢出:每个任务都需要分配堆栈大小(Stack Size)。给太小会崩溃(Stack Overflow),给太大会浪费内存。这需要经验积累,可以使用 FreeRTOS 自带的检测功能。
-
中断与任务:中断服务函数(ISR)中不能使用会导致阻塞的 API(如
xQueueReceive),必须使用带FromISR后缀的特殊 API。
FreeRTOS 是嵌入式软件架构的一次升华,学会了它,你就不再是写“流水账代码”的程序员,而是设计“并发系统”的工程师了。FreeRTOS的官网(https://www.freertos.org/)提供完整源码和文档,适用于从简单传感器到复杂物联网设备的广泛应用。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)