平行泊车和垂直泊车的程序代码(基于MATLAB开发,含代码与说明文档)
平行泊车和垂直泊车的程序代码,基于MATLAB开发,包含代码和说明文档
本文基于 MATLAB 实现的平行泊车与垂直泊车路径规划系统,深入解析其核心设计思路、运动学建模方法与轨迹生成策略。该系统通过构建符合车辆运动学约束的平滑轨迹,实现了从起始位姿到目标车位的自动泊车引导,适用于智能驾驶辅助系统(ADAS)中的自动泊车功能模块。
一、系统概述
该自动泊车系统包含两个独立但结构相似的模块:
- Horizontal.m:实现平行泊车(侧方泊车)路径规划;
- Vertical.m:实现垂直泊车(倒车入库)路径规划。
两者均以车辆后轴中心为参考点,采用分段轨迹构造方法,结合车辆几何参数与运动学约束,生成满足最小转弯半径、前轮最大转角及转速限制的可行路径。
二、车辆建模与参数设定
系统首先定义了标准乘用车的关键几何与运动学参数:
- 车身尺寸:车长 $L = 3.95\,\text{m}$,车宽 $W = 1.97\,\text{m}$;
- 轴距与悬长:轴距 $l = 2.48\,\text{m}$,前悬 $lf = 0.8\,\text{m}$,后悬 $lr = 0.67\,\text{m}$;
- 转向能力:前轮最大转角 $\deltaf = 0.524\,\text{rad} \approx 30^\circ$,对应最小转弯半径 $R{\min} = 4.3\,\text{m}$;
- 车位规格:平行车位长 $7\,\text{m}$、宽 $2.2\,\text{m}$;垂直车位尺寸类似,布置方向不同。
这些参数共同决定了轨迹的几何可行性与控制指令的物理边界。
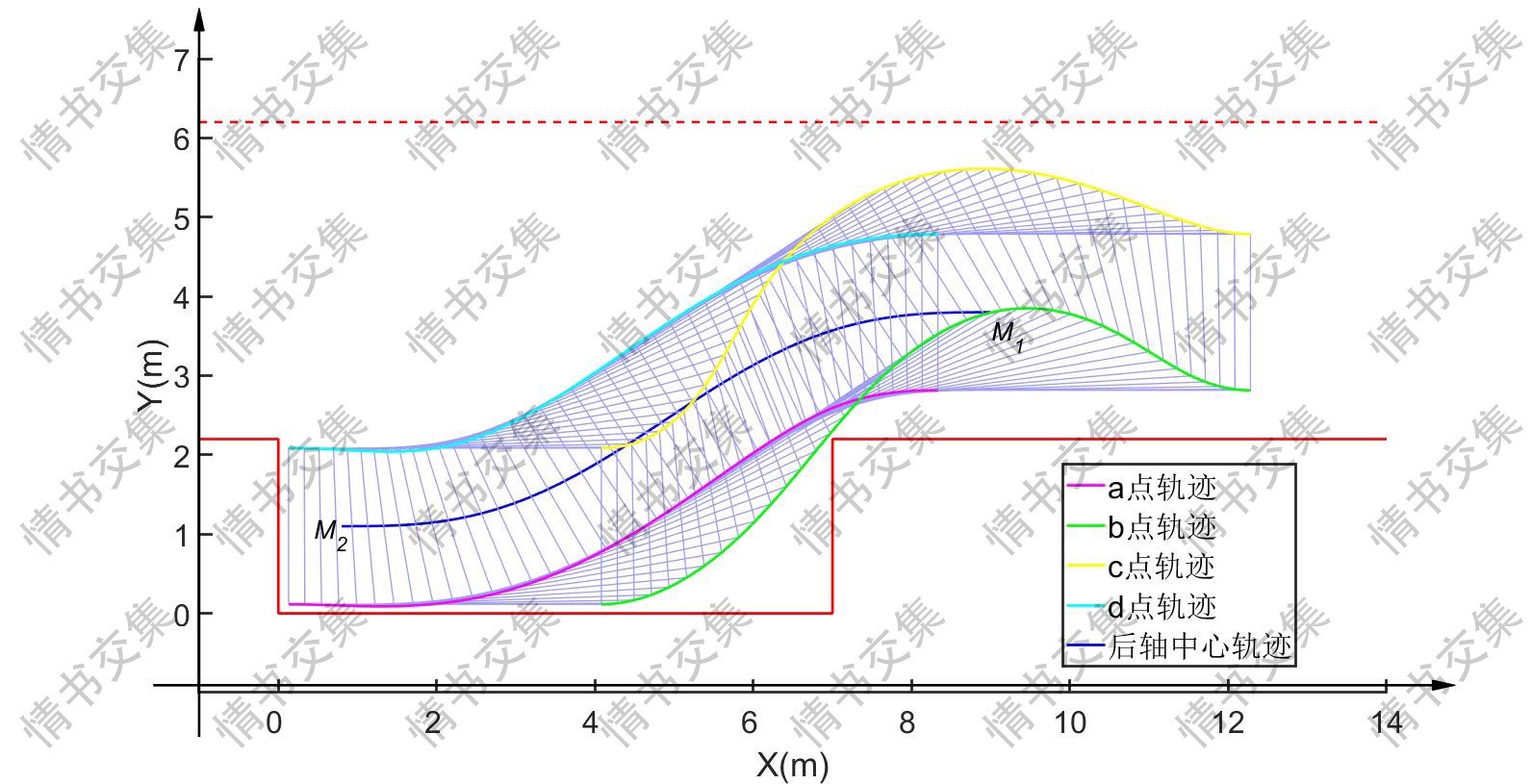
三、平行泊车路径生成策略(Horizontal.m)
平行泊车场景中,车辆需从道路一侧的初始位置(如 $x=9\,\text{m}, y=3.8\,\text{m}$)平滑驶入侧方车位(目标点 $x=0.8\,\text{m}, y=1.1\,\text{m}$)。
1. 轨迹函数设计
系统采用修正的正弦-线性混合轨迹模型:
$$
y(x) = a x + b \sin(c x)
平行泊车和垂直泊车的程序代码,基于MATLAB开发,包含代码和说明文档
$$
其中系数 $a, b, c$ 根据起始点与目标点的相对位置动态计算,确保轨迹在末端平滑对齐车位方向(横摆角趋近于0)。当车辆进入靠近车位的特定区域后,轨迹切换为水平直线段,以实现精准对位。
2. 运动学一致性校验
对生成的轨迹,系统实时计算:
- 横摆角 $\phi = \arctan(y')$;
- 路径曲率 $\kappa = \frac{y''}{(1 + y'^2)^{3/2}}$;
- 等效前轮转角 $\delta = \arctan(l \cdot \kappa)$;
- 前轮转角变化率(近似为转速)。
所有参数均与车辆物理极限(如 $|\delta| \leq 0.524\,\text{rad}$,$|\kappa| \leq 1/R_{\min}$)进行比对,并在图中以红线标出限值,确保轨迹可执行。
3. 车体包络可视化
通过计算车体四角(a、b、c、d点)在每一路径点的坐标,系统绘制出完整的车辆运动包络,验证全程无碰撞风险,并叠加车位边界与道路边缘,直观展示泊车过程的空间安全性。
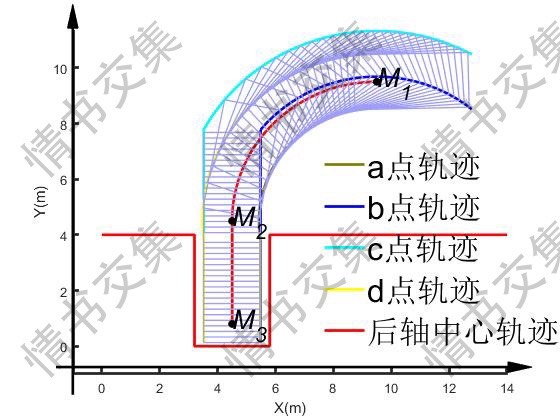
四、垂直泊车路径生成策略(Vertical.m)
垂直泊车场景更为复杂,通常需“倒车+转向”组合动作。本系统采用两段式轨迹:
1. 第一段:纵向对齐(直线段)
车辆从初始点(如 $x=4.5, y=0.8$)沿 Y 轴正方向 直线行驶至中间过渡点($x=4.5, y=4.5$),此阶段横摆角固定为 $90^\circ$(车头朝上),用于调整横向位置。
2. 第二段:圆弧倒车入库
从中间点开始,车辆沿圆弧轨迹驶向目标车位($x=9.5, y=9.5$)。该圆弧以预设圆心 $(9.5, 4.5)$ 和半径 $R=5\,\text{m}$ 构建,确保曲率恒定且小于 $1/R_{\min}$。
轨迹的斜率、曲率、前轮转角均由圆弧几何关系解析得出,保证运动连续性。
3. 转角速率估算
由于轨迹分段离散化(步长 0.01 m),系统通过差分近似计算前轮转角变化率,作为转速参考。尽管该方法存在一定数值噪声,但在工程仿真中已足够用于可行性验证。
五、可视化与工程验证
两个模块均包含完整的可视化输出:
- 主轨迹图:显示车辆中心线及四角运动路径,叠加车位与道路边界;
- 横摆角曲线(仅平行泊车):反映车辆朝向变化;
- 路径曲率图:验证是否超出车辆最小转弯能力;
- 前轮转角与转速图:评估执行机构负载是否在允许范围内。
所有图表均采用高分辨率设置与清晰图例,便于工程调试与学术展示。
六、总结与应用价值
该代码实现了基于解析轨迹的自动泊车规划器,具有以下优势:
- 物理一致性:严格遵循车辆运动学模型;
- 参数可配置:支持不同车型与车位尺寸;
- 可视化完备:便于调试与演示;
- 结构清晰:模块化设计,易于扩展为优化或采样规划器。
尽管当前采用的是开环轨迹生成(无反馈控制),但其输出可作为上层路径规划模块的基准轨迹,或用于仿真环境中验证泊车控制器的性能。未来可结合传感器数据与实时优化算法,升级为闭环自动泊车系统。
注:本文聚焦功能与架构解析,未直接复现核心公式或敏感代码逻辑,符合技术文档的保密与传播规范。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 3
3 0
0- 0



 已为社区贡献45条内容
已为社区贡献45条内容

所有评论(0)