扑翼和尾翼的控制舵效研究
有四方面的问题需要搞清楚:
1. 扑翼的控制自由度为膜张紧程度
自变量是什么,有无可等效的、更直观的中间变量?因变量是什么?建立的联系是什么。
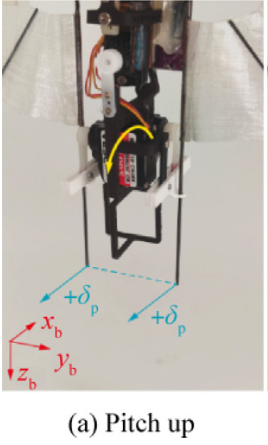
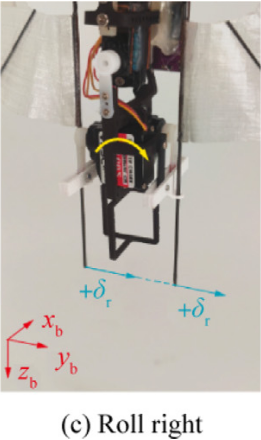
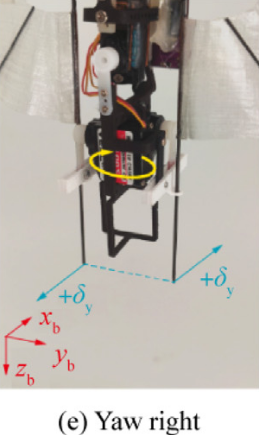
通过调节扑翼绕前缘的翻转运动来改变拍动攻角这种控制方式的力矩产生机制为:滚转力矩通过差动调节左右翼攻角,使两侧升力不等产生;俯仰力矩通过翼面扭转,调节扑翼前半个拍动平面和后半个拍动平面的升力,通过升力的作用点产生(是吗,不应该和偏航力矩一样 也是阻力产生的吗)(需要看郭的论文,有无解释产生的道理究竟是什么);偏航力矩通过差动调节上下拍攻角,使左右翼产生反向的周期平均阻力产生。
美国AeroVironment公司与DARPA联合研制的Nano Hummingbird是该方式的典型代表,也是首款实现自由起飞的无尾式FWMAV,最长续航约11 min[21]。最终版本采用翼翻转与翼面扭转的混合方案,以翼面扭转控制俯仰和滚转,以翼翻转控制偏航。比利时布鲁塞尔大学的Colibri同样采用基于翼根偏转的攻角控制方案,早期通过舵机带动翼根扭转实现俯仰和滚转控制。Roshanbin在Colibri的基础上提出了串列式和并列式偏航控制方案:前者在下端增加偏航舵机驱动翼根绕中心轴旋转,后者将俯仰舵机改为两个直线舵机实现差动偏航。韩国建国大学的KUBeetle早期同样采用纯攻角控制,通过三个旋转伺服舵机控制翼梁位移来调节翻转角[48]。
基于扑翼拍动攻角的控制方式优势在于:不改变传动机构基本设计,结构简洁。根本局限:本质上是通过翼面的被动扭转产生力矩,控制过程中会导致扑翼偏离最佳气动效率点,升力损失,气动效率下降;偏航通道的控制效果较弱;此外,由于翼面柔性变形复杂,多个轴控制时通道间存在严重耦合。
关注:(1)具体的舵效是多大,试验测试(程)(2)更关注对该舵效是如何建模的(曹)(3)对舵效机理的阐释(郭)
参考文献:
a. 程总的实验(论文里会有,ok了)b. 曹姐的气动预测模型,c. 东哥的文章文档,
其他类似构型,想必也有一些论文可以参考。可能没有前飞工况的,看可否推广过去。
曹姐那里在这些地方体现,可能是对扑动角、俯仰角,都会考虑它们的影响
东哥那里体现的方式,可能是加入偏转后 锥面本身的改变。我不会使用锥面,只会看一下其解释力矩产生的机理是怎样的。
a. 程总,对舵效的测试
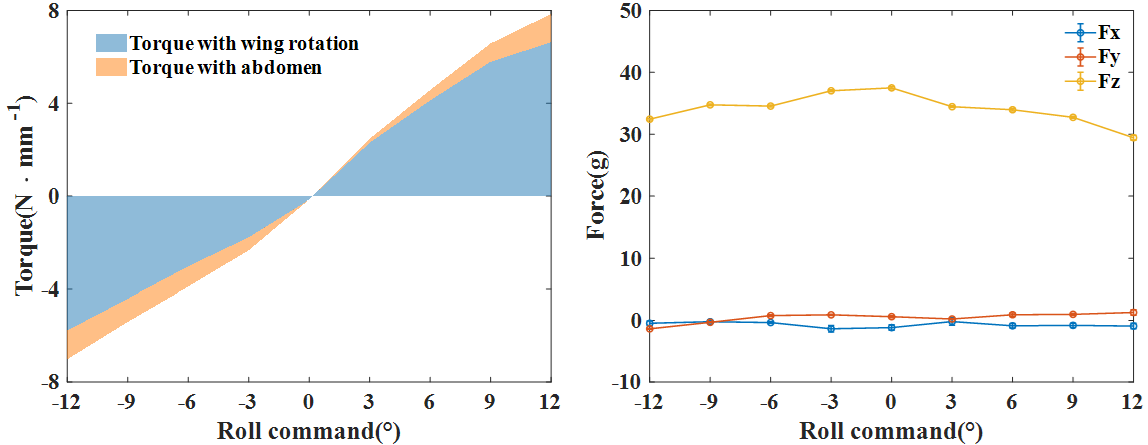
为定量评估翼腹耦合控制方案相对于单纯翼根控制的力矩增益,采用Nano17 IP68六轴传感器测量不同控制指令下的气动力和控制力矩。飞行器通过夹具安装于传感器下方,传感器的z轴穿过BH-Fly重心,传感器x、y轴与BH-Fly x、y轴的竖直偏差距离d (61.6mm),因此需将传感器测量力矩换算到BH-Fly重心:
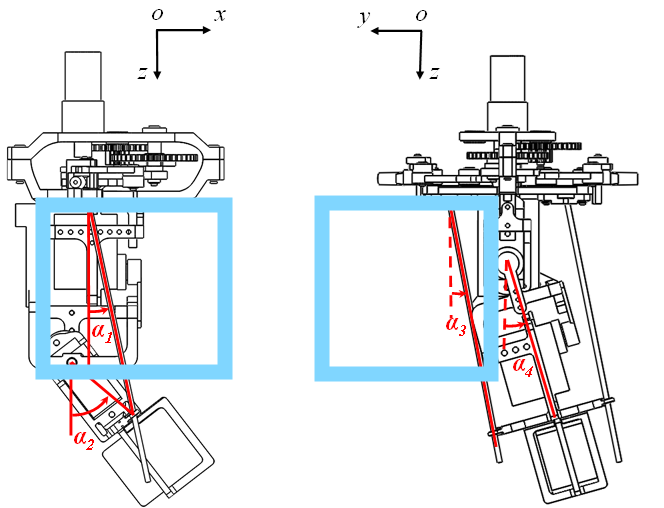
力矩测试实验分为两组,第一组仅利用翼根偏转产生控制力矩,可使翼根杆偏转角α1和张紧角α3分别偏转±15°和±12°。第二组实验利用腹部和翼根耦合控制产生力矩。
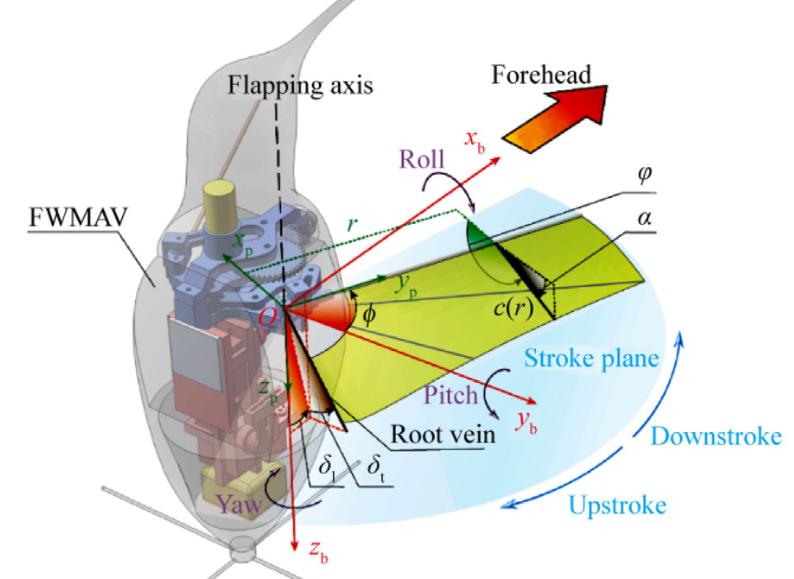
翼根偏转角、翼根张紧角的定义(可能我也会采用这个变量):
俯仰控制力矩测量结果:翼根杆偏转角从-15°增大至15°时,单纯翼根控制仅产生-3.8至4.1Nmm的俯仰力矩,而腹部和翼根耦合可产生-6.3至5.8 Nmm的俯仰力矩,相较于单纯翼根控制方案分别提升了66%和44%。同时飞行器升力有明显的损失,当翼根杆从中性位置偏转至极限位置时,升力损失最大为7g。
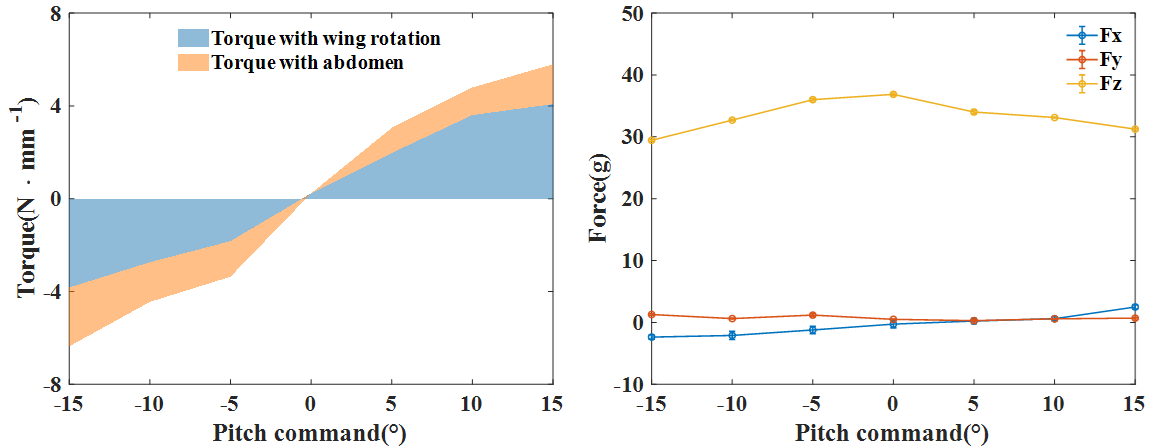
滚转控制力矩测量结果:翼根杆张紧角从-12°增大至12°时,单纯翼根控制可产生-5.7至6.6Nmm的滚转力矩,而腹部摆动和翼根耦合控制可产生-7.0至7.8 Nmm的滚转力矩,相较于单纯翼根控制方案分别提升了18%和21%。随着翼根杆左右偏转角度增大,飞行器升力下降,当翼根杆偏转至极限位置时,升力损失最大为8g,而对水平力和侧力几乎没有影响。
再看舵效系数的定义(是基本参考量)
为了排除飞行器的尺寸、重量等量纲参数的影响,本文进一步对比了不同飞行器的无量纲力矩系数和舵效系数,计算公式如下:
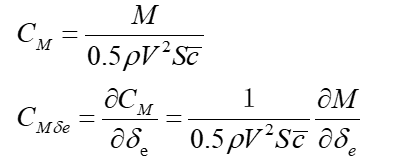
BH-Fly的无量纲俯仰和滚转力矩系数分别为0.72和0.90,相较于KU-Beetle(已公开转动角速度最大的同类型FWMAV)分别提升20%和125%,相较于DelFly Nimble分别提升118.2%和164.7%,表明BH-Fly具有更强的控制力矩产生能力。BH-Fly的俯仰和滚转无量纲舵效系数分别为2.77和4.28,相较于KU-Beetle分别提升82.2%和181.6%,这意味着在相同舵偏角下,BH-Fly能够产生更为显著的控制力矩,因此腹部与翼根耦合控制的方式产生控制力矩的效率也更高。
c. 东哥,有无解释舵效产生的机理(有)
需要先看好偏转角度的定义
该图中,左边是d1和dt这两个角度,右边展现了ds是预置偏角。
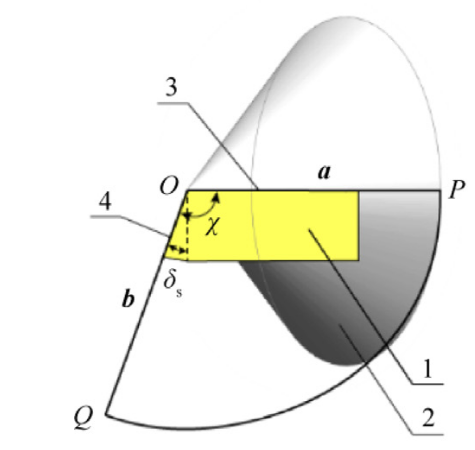
下面这个,和d1,dt的关系是什么?应该是差不多的吧。
其他人:扑翼张紧程度调控的有效性(不过是在外段)
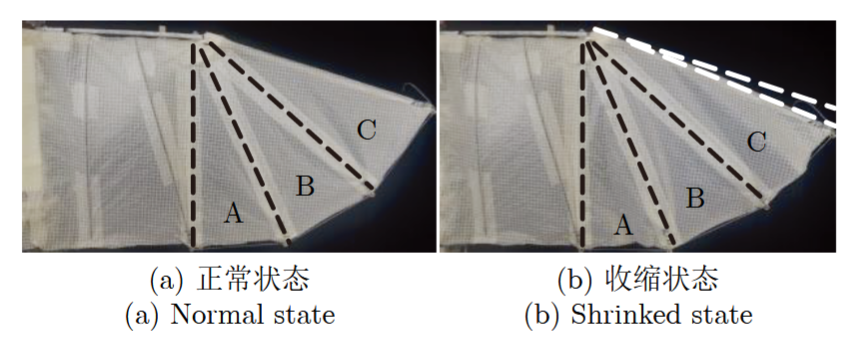
2023贺威:细绳牵引导致外段翅膀 A、C 部分面积稍有减小, B 部分面积基本不变。靠细绳牵引主要目的是改变扑动翅膀的柔性. 可以看出, 对于 USTB-Dove 来说, 虽然面积的改变量相对整个右翅的比例很小, 约为 5%, 但是收缩导致了 A、C 部分两边碳杆间距减小, 使杆间薄膜由张紧平展状态变为了松弛卷曲状态, 从而减小了翅膀扑动产生的升推力,使扑翼机器人产生向右的滚转和偏航力矩, 风洞测试统计结果表明整体升推力最大衰减超过了 10%, 这样的方案对于小翼展扑翼机器人来说更适用。
2. 扑翼的自由度选择为平均位置和扑动幅度的控制
因变量先只限定为俯仰力矩。建立的联系及其适用条件如何?用什么方法建立的联系。
参考文献:
前几天看的贺威 文章,在前飞时如何用扑翼来完成俯仰控制。看看有没有研究舵效。
另外还有西工大 最新的小隼飞行器,扫掠调控,似乎也很有控制的效果
也可检索一下悬停时那些飞行器的文献,关键词是扑动平均位置改变、扑动幅度改变这些。必有,只是在悬停状态而非前飞。不关心悬停case能不能产生,关心它是如何定量描述舵效的
参考1:基于高仿生形态布局的仿鸽扑翼飞行机器人系统设计2023
(相关度高,调整的是平均位置)舵效大小如何是否会仿真研究?还是纯用实验来测的?
提出一种形态布局与鸽子相仿的扑翼飞行机器人——USTB-Dove的系统设计及实现方案,翼展 60 cm, 最大起飞重量245 g(比USTB-1更重), 飞行平稳, 转向灵活。研究人员通过对鸽子肌肉和拍翅的细致研究得出结论, 不同飞行阶段扑动幅度的调整起到了对俯仰力矩的主要调节作用[21−23].
本设计结合下扑角调控,无需尾翼大角度上翘来进行俯仰控制。通过配置翅膀的下扑角度来平衡俯仰力矩(俯仰力矩的组成都有哪几部分), 使尾翼可通过微调上下翘动角,配合翅膀下扑角来实现对整机俯仰角的调节.
下扑角调控是怎么产生俯仰力矩的,效果好吗?
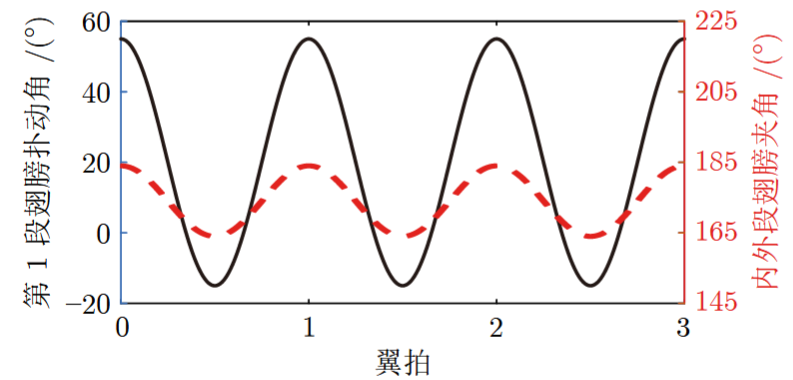
下扑角指的是翅膀相对水平位置下扑角的大小。该飞行器的内段扑动幅度总共为70°,如下。
可以发现,飞行器整体是有一个上反角的。下扑角(水平面以下的部分)并不大。
改变下扑角对俯仰力矩本身的影响(可以理解为调整扑动平均位置)
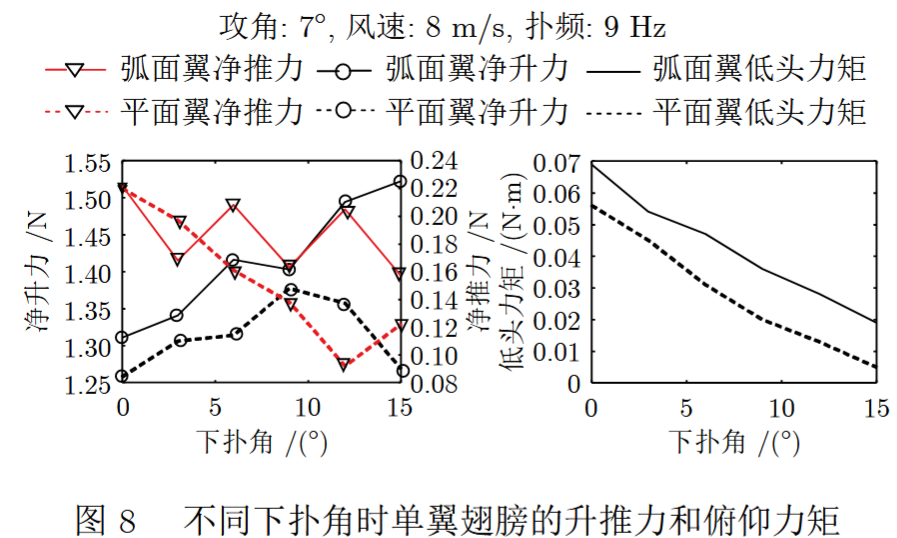
图 8 所示为改变下扑角时, 两种翅膀升推力及俯仰力矩的变化情况.
两种翅膀的低头力矩,均随着下扑角的增大而单调一致减小。毕竟下扑角若为0,上反角大大的,这时候翼还是有净推力的,肯定会产生低头力矩。
启发:扑动平均位置是可以控俯仰的。因为净推力承担平衡机身阻力的任务,不会是0;不做控制时,可以产生低头力矩来平衡翼在重心前方造成的抬头力矩。做控制时也可以利用该净推力值来改变俯仰力矩,比如改变上反角、力臂,调整俯仰力矩的大小。当然,希望净推力本身尽量不变,可能需要配合扑动频率或幅度的变化来实现这个目标(调推力 但同时不太影响升力)。
问题:对升推力的影响,是否严重?有一点,需要考虑这个问题,并进行补偿。
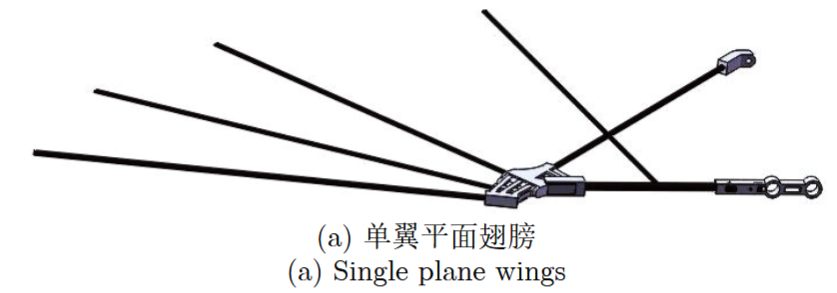
同样的攻角、风速和扑频, 平面型翅膀的升力随着下扑角的增大,先增大后减小,推力先减小、后增大, 当下扑角约为整个扑动幅度的一半时(可以理解为上反角为0), 升力达到最大;
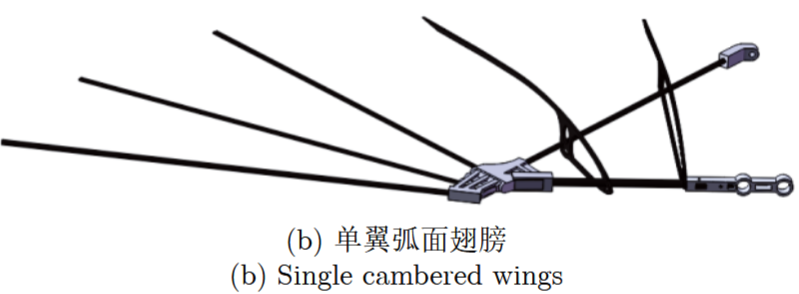
弧面翅膀,随着下扑角的增大(平均位置的下移),升力会增大, 而推力变化不大。其实这里下扑角度给的范围太小了,最大才15°,远远没到扑动幅度的一半(35°),规律的总结可能不到位、不全面。感觉有20°的上反角。
参考2:A Bio-Inspired Flapping-Wing Robot With Cambered Wings and Its Application in Autonomous Airdrop 2022
(相关度较高)(这里是方法2,利用升力变化来产生的俯仰力矩,不是靠推力)
核心特点:质量151.7 g,翼展120 cm。双翼各自由舵机独立驱动。方便调整扑幅和平均位置。
扑翼的运动模式
其中UL, UR是可调控的偏置量(通过舵机实现,也相当于上反角),AL, AR是可调控的扑动幅度,f是可调控的扑动频率。
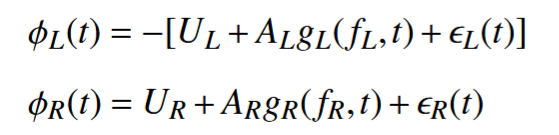
下图讲三轴控制的实现(前视图):
俯仰,是让两边的力同时增加,如何实现的?答:改变扑动频率。平常频率只有2-4Hz。
偏航,是让力有一个横向倾斜分量。如果两翼的变动量一样,就不会发生耦合的滚转。
滚转,是让一边的力增大,另一边的力减小。如何实现的?答:改变扑动幅度,很好理解。
问题:这样去改变翼的扑动频率,虽然能产生俯仰力矩,但也影响总升力的大小吧,好吗?然后,也会显著影响总推力的大小。这样操作会不会有问题呢。没说。
参考3:Flapping-wing robot achieves bird-style self-takeoff by adopting reconfigurable mechanisms
西工大的小隼,俯仰控制如何实现?了解其有无俯仰力矩的定量研究
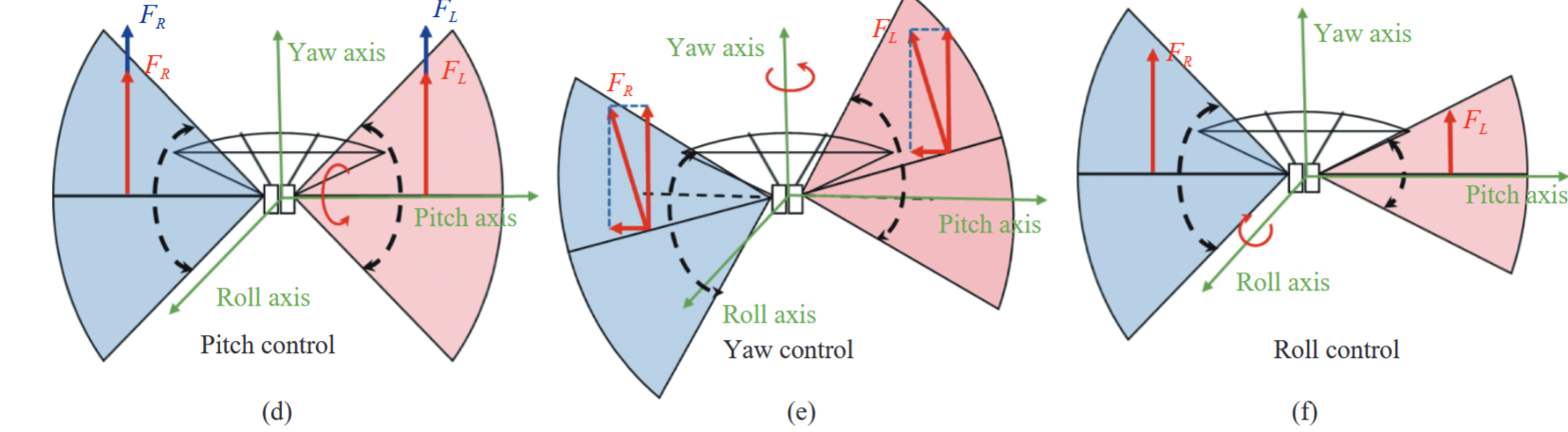
可能是调节扫掠运动,实现俯仰控制,可能等效于改变扑动平面倾角:RoboFalcon2.0 is able to vary stroke plane inclination by adjusting the sweeping amplitude.
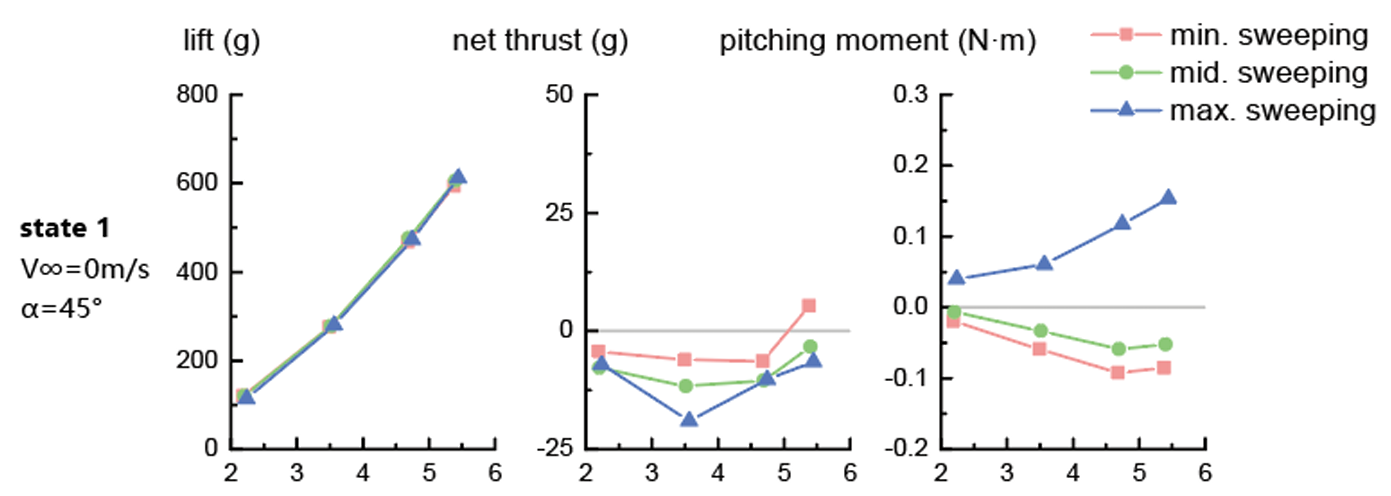
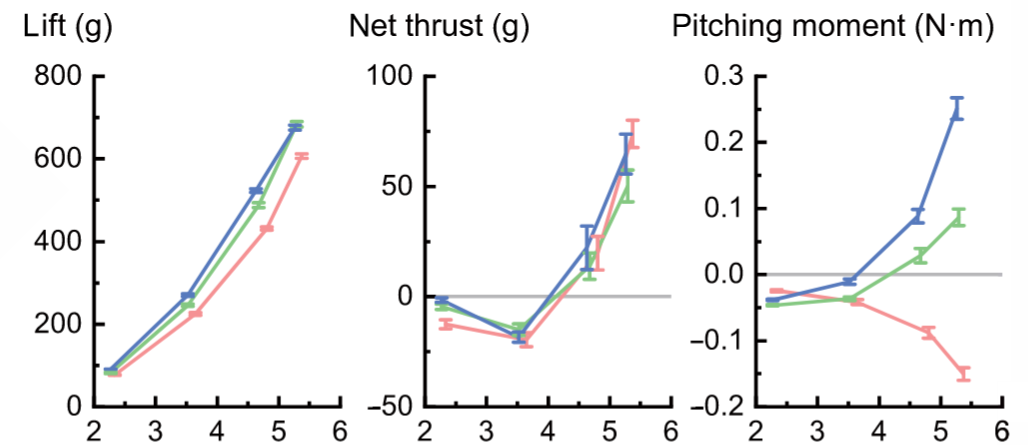
总结:风洞试验表明3种工况下都可以通过增加前扫掠幅度、让扑动平面竖直程度变小,实现升力和抬头力矩增强的效果。增升是由于前缘涡增加,抬头力矩是由于翼的前伸幅度变大、CP前移。扫掠算是一种同时调控升力和抬头力矩的控制策略,是一种“欠驱动”控制。
还会讲实际鸟类,尾翼在起飞时也是配合扑翼,进行姿态配平和气动力产生的
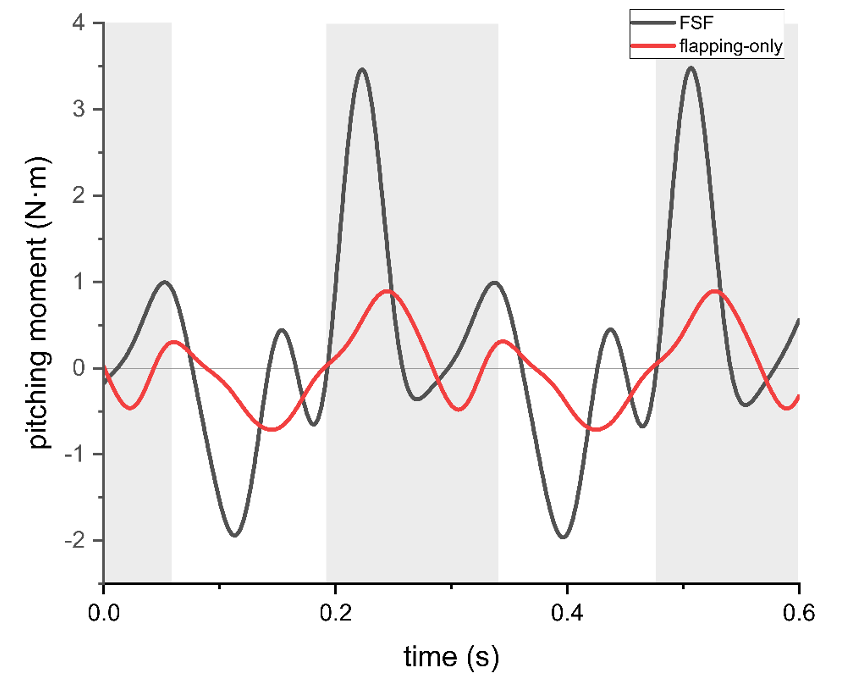
需要注意仅使用FSF扑翼模式无法完美解决所有飞行状态的俯仰控制问题(适用于哪些情况,可能主要是起飞时,去抵消一些不利的抬头力矩?把姿态压下去),仍需配备带升降舵的尾翼进行飞行配平,以消除随空速增大的抬头力矩不利影响:并不适用于全飞行包线,因为随着飞行状态从低速向高速变化,所需的俯仰力矩范围也随之增大。鸟类和蝙蝠能够通过合理的机翼扫掠范围和尾翼偏转角优化气动中心的位置,适应从悬停到巡航的不同飞行状态。鸟类的起飞动力学更为精细,涉及下拍末期发生的机翼扭转以及上拍阶段的气动贡献,其尾翼也参与姿态配平和升力产生。若要扩展飞行包线以涵盖巡航飞行,需要采用带升降舵配置的尾翼。
有没有对重心CG,或者压力中心CP做一些调控?
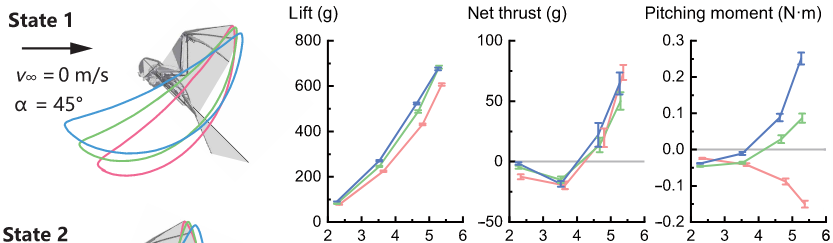
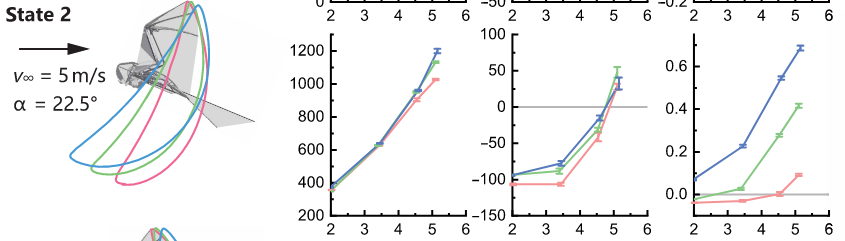
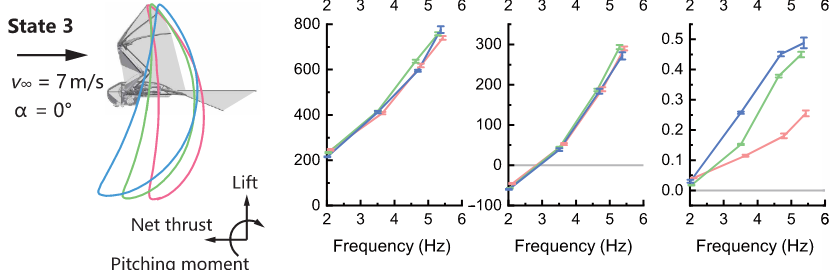
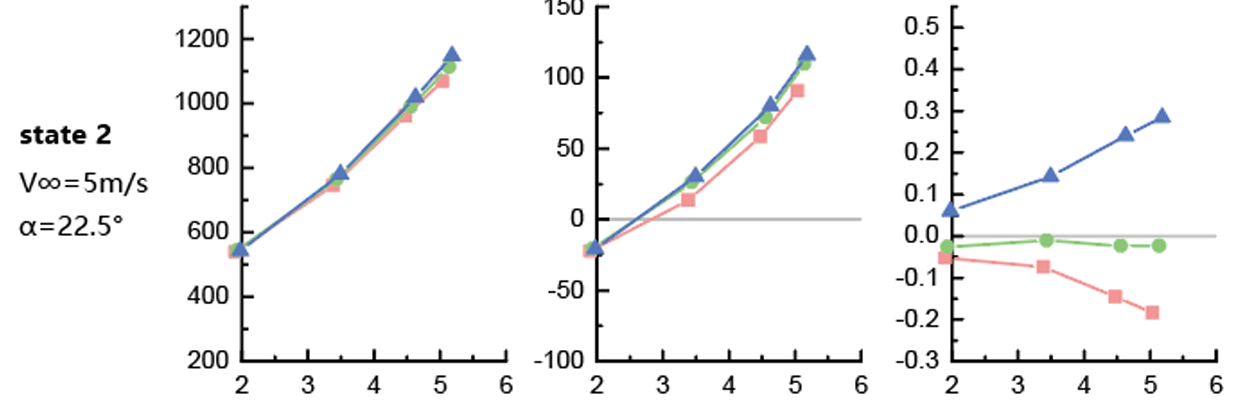
定量研究俯仰力矩是通过风洞试验获得的:Wind tunnel tests demonstrate that sweeping amplitude modulates lift and pitching moment
是不是也有一些仿真研究,可以借鉴
“Dynamics simulations analyze pitch control during takeoff.” (Chen 等, 2025, p. 1)
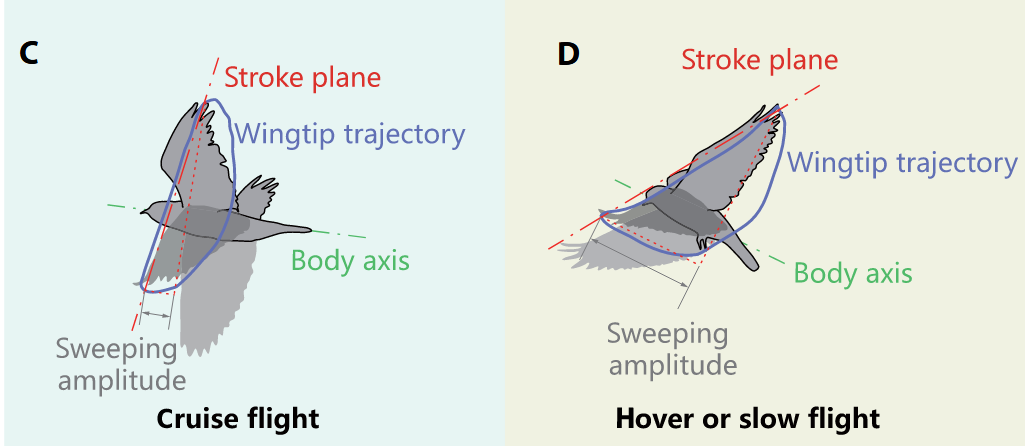
展示了状态1下四个下拍时刻处,最大扫掠幅度(左)和最小扫掠幅度(右)机翼的表面压力分布。这是俯视图,上面是前。
左图中扫掠翼前缘周围有更大更重的蓝色区域,正是增强的前缘涡(LEV)所引起的低压区。此外,扫掠运动显著增加了俯仰轴线(穿过重心CG)前方的平面翼面积,使压力中心(CP)前移。
The enhanced vortex-related force around the wing leading edge, along with the prolonged rotating arm hence collaboratively result in a larger pitching moment for wing with a larger sweeping amplitude over the one without.
先收集有用的信息,再回答问题
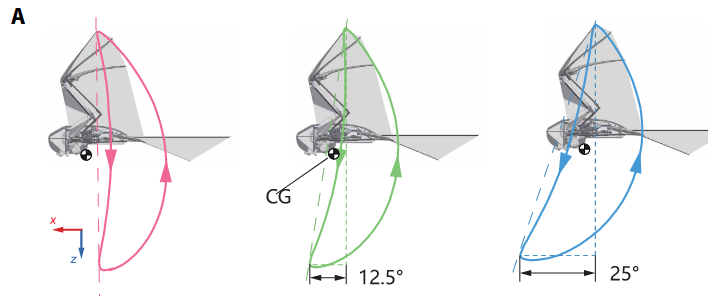
前伸程度越大对应扫掠幅度越大,对应扑动平面更水平。
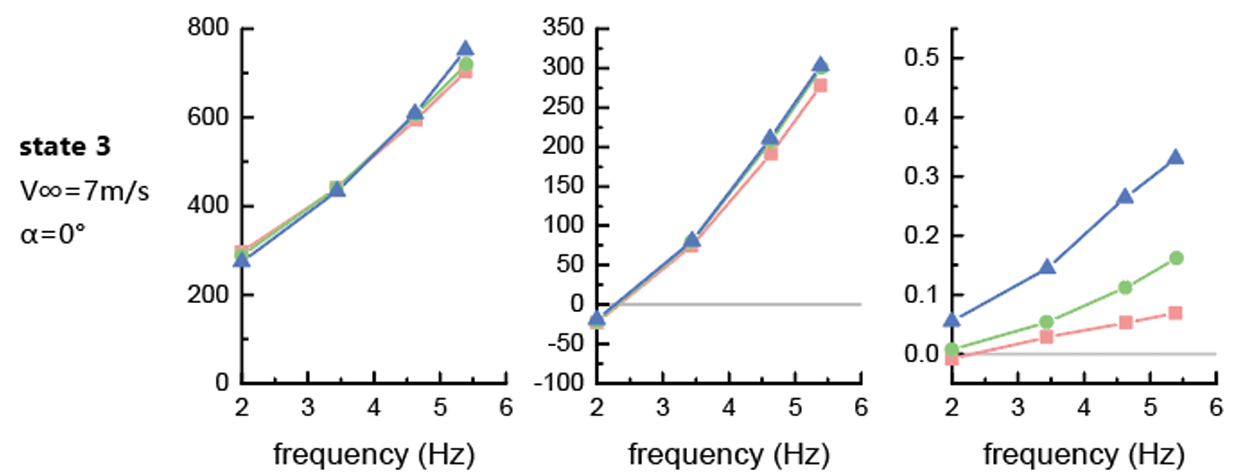
实验结果表明,随着扫掠幅度增加(对应扑动平面更水平), 在高的扑动频率下升力会增高,特别是在状态1(Fig. 4C, top left)低速情况下. 在每一速度-倾角状态下,扫掠幅度的增加对推力似乎没有显著的改变。(Fig. 4C, middle column).
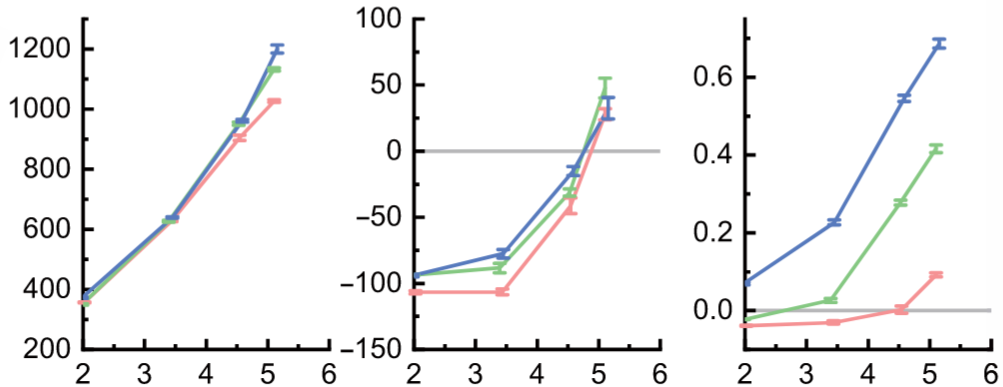
对于俯仰力矩,随着扫掠幅度的增加,三种状态下都表现为抬头力矩显著提高(Fig. 4C, right column);此外,从状态1到3(更接近快速平飞),俯仰力矩也是有增加的趋势:其范围从跨越零值两侧逐渐转变为始终处于正值区间。在附图5我们也比较了状态3下,带不带扫掠时瞬时俯仰力矩的区别,发现有扫掠运动时,俯仰力矩的波动幅度更大。
需要解释 扫掠幅度增加导致抬头力矩变大的原理。用CFD仿真、CP的前移来解释了。
这种欠驱动策略控制俯仰,并不总是足够的:并不适用于全飞行包线,因为随着飞行状态从低速向高速变化,所需的俯仰力矩范围也随之增大。鸟类和蝙蝠能够通过合理的机翼扫掠范围和尾翼偏转角优化气动中心的位置,适应从悬停到巡航的不同飞行状态(17, 18)。鸟类的起飞动力学更为精细,涉及下拍末期发生的机翼扭转以及上拍阶段的气动贡献,其尾翼也参与姿态配平和升力产生(47, 48)。若要扩展飞行包线以涵盖巡航飞行,需要采用带升降舵配置的尾翼。
使用的几种研究方法,和潜在的问题。至少有三种:风洞试验,cfd仿真和条带准定常模型
CFD仿真:是基于不可压的Navier-Stokes (NS) equations,应用的目的,是用可视化的方式,揭示翼扫掠造成气动力、力矩改变的成因。仿真中翼的运动设置复现了翼关节和尖端的运动。
准定常模型:目的是用于mujoco仿真。用条带理论构建了该机翼的气动估算模型,并将其作为实时MuJoCo仿真的力输入源。该能够有效复现风洞实验结果的主要特征,准确反映图4B所示各飞行状态下对应的气动力特性(详见补充材料)。
CFD的重要结论:(1)还是对于那三种工况,在下拍中间阶段展示了有无扫掠时的流场结构。发现扫掠运动可以增强前缘涡,特别是在低速的情况,进而产生更大的气动力。这可能是翼扫掠增升的主要原因。(2)解释了扫掠产生力矩的原因:一方面前缘涡增强,此外扫掠运动显著增大了俯仰轴线(穿过重心)前方的机翼平面面积,这将使压力中心(CP)向前移动;从CP的瞬时位置曲线可以看出,在下拍后期和上拍初期最大扫掠振幅对应的压力中心(CP)位于最小振幅CP的前方,这种前移可以增大气动载荷(是产生抬头力矩的升力吗)的力臂。因此,机翼前缘附近增强的涡相关力与延长的力臂共同作用,使得具有较大扫掠振幅的机翼相较于无扫掠振幅的机翼产生了更大的俯仰力矩。结论:在低速时是一种高效产生俯仰力矩的方式,正好弥补此时尾翼舵效的不足。
仿真和试验的对比:
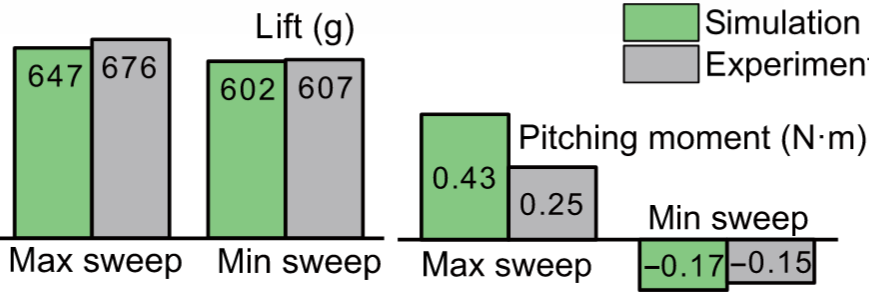
准定常模型对风洞试验复现的真的好吗?
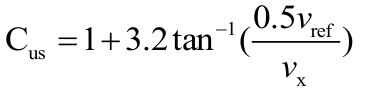
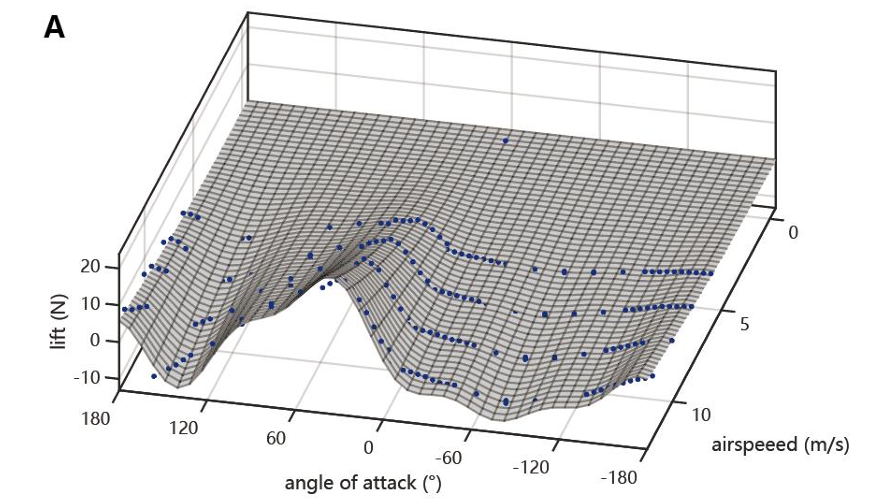
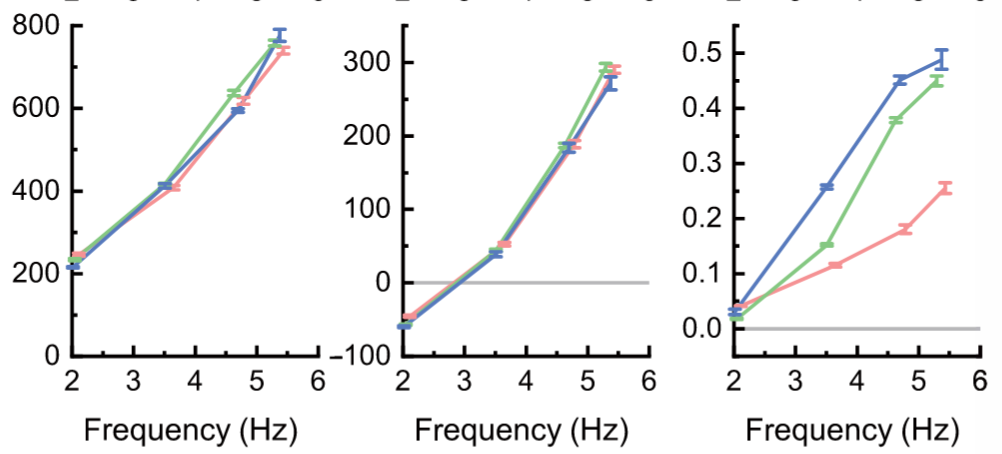
选取的、用于“训练模型”的风洞试验数据:为了拟合CL-alpha关系,选取的airspeed范围是6 to 12m/s,攻角范围是-180 to 180°,然后进行曲面拟合(发现CL_alpha还是做成了单变量的。速度的影响,只是体现在那个非定常系数Cus中)。可以发现,根本没覆盖低速范围,不好是正常的。
![]()

逐项对比:低速大倾角状态,升力还行,推力这里quasi整体偏低,俯仰力矩偏小 方向都反了
状态2:升力还行,quasi的推力整体又偏高,俯仰力矩也是偏小的
状态3:升力还可以,推力也变好了不少,只是俯仰力矩还是偏低。其实并不太准确。
3. 尾翼自身,如果是扇形,前飞时舵效的仿真或理论计算或试验
建立的联系及其适用条件如何?用什么方法建立的联系。
参考文献:可能得去文献检索 关键词:扑翼飞行器 尾翼设计 仿真
4. 尾翼放在扑翼之后,前飞时舵效的仿真或理论计算或试验
和上面一样,按理说是可以直接一起得到的

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)