【优化求解】基于粒子群算法 PSO 拟合偏心抛物面天线的数学模型附MATLAB代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
一、坐标转换原理
-
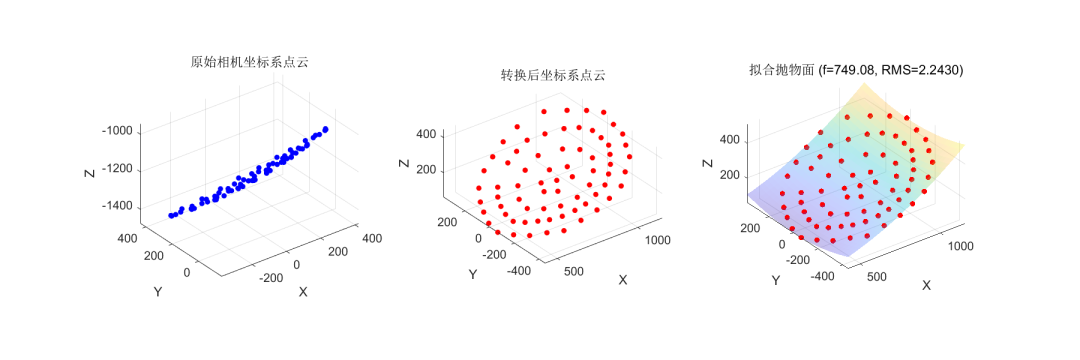
坐标转换基础:在计算机视觉和几何变换领域,将点从一个坐标系转换到另一个坐标系通常通过一个包含旋转矩阵 R 和平移向量 t 的转移矩阵来实现。对于相机坐标系下的点 Pc,要将其转换到目标坐标系 {W} 下成为 Pw,转换公式为 Pw=R⋅Pc+t,其中 Pc 和 Pw 通常表示为齐次坐标形式,以便统一处理旋转和平移操作。旋转矩阵 R 描述了坐标系之间的旋转关系,它是一个 3×3 的正交矩阵,满足 RTR=I(I 为单位矩阵),其行列式为 1。平移向量 t 则表示了坐标系之间的平移量,是一个 3×1 的向量。
-
确定转移矩阵的目标:在这个偏馈天线的问题中,我们的目标是找到一个合适的转移矩阵 [R,t],使得转换后的点 Pw 能够拟合出标准抛物面数学模型 4f⋅z=x2+y2(这里 f=750)。这意味着我们需要通过调整转移矩阵的参数,让点 Pw 的分布符合抛物面的形状特征。由于标志点数量较多(150 +),可以利用这些点的整体分布信息来更准确地确定转移矩阵。
二、抛物面拟合原理
-
最小二乘法拟合:对于给定的点集 Pw,要拟合出标准抛物面 4f⋅z=x2+y2,常用的方法是最小二乘法。最小二乘法的核心思想是找到一组参数(在这里是转移矩阵 [R,t]),使得实际点到拟合抛物面的距离平方和最小。设点 Pw=(xi,yi,zi),对于抛物面方程 4f⋅z−x2−y2=0,定义误差函数 E=∑i=1n(4f⋅zi−xi2−yi2)2,其中 n 是点的数量。通过不断调整转移矩阵 [R,t],使得误差函数 E 最小化,从而得到最佳拟合抛物面。
-
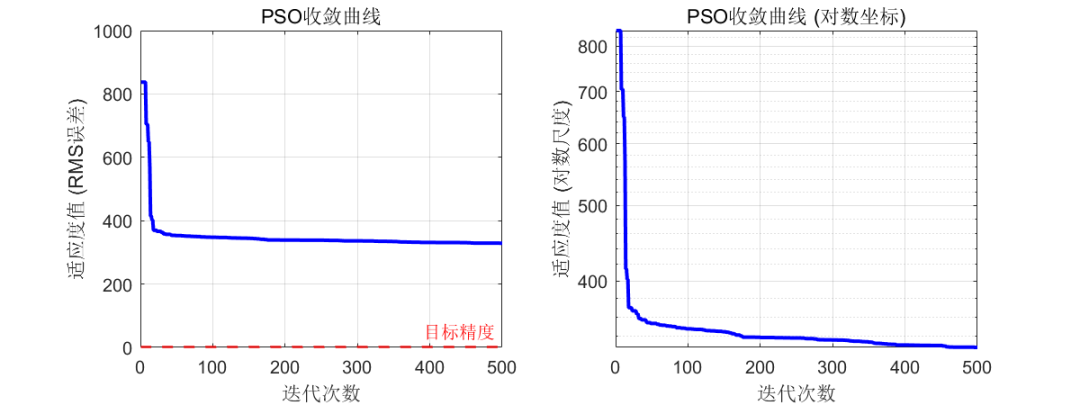
拟合精度控制:期望拟合精度控制在 0.4 以下,这意味着在最小二乘法拟合过程中,最终得到的误差函数 E 的值对应的平均距离误差要小于 0.4。为了达到这个精度要求,需要采用合适的优化算法来调整转移矩阵。可以使用迭代优化算法,如梯度下降法或更高级的优化算法(如 Levenberg - Marquardt 算法),这些算法通过不断计算误差函数关于转移矩阵参数的梯度,并根据梯度方向调整参数,逐步减小误差函数的值,直到满足精度要求。
三、偏馈天线相关约束原理
-
偏馈天线特性:偏馈天线是一种特殊的抛物面天线,其抛物面并非以对称轴为中心对称分布。在处理偏馈天线的标志点时,需要考虑到其特殊的几何特性。这可能会影响到点在坐标系中的分布以及拟合抛物面的方式。例如,偏馈天线的形状决定了标志点在抛物面上的分布并非完全对称,这在拟合过程中需要特别处理,以确保最终得到的抛物面符合偏馈天线的实际形状。
-
坐标轴与坐标范围约束:最终抛物面的坐标轴应该是 z 轴,这意味着在坐标转换和拟合过程中,要保证抛物面的对称轴与目标坐标系 {W} 的 z 轴重合。同时,Pw 的 x 坐标范围限定在 [10,100],y 坐标应该在 x 轴两侧(有正有负)。这些约束条件进一步限制了转移矩阵的取值范围。在优化转移矩阵的过程中,需要将这些约束条件纳入到优化算法中。例如,可以通过设置惩罚项的方式,当转移矩阵导致的点坐标超出范围时,增加误差函数的值,从而引导优化算法找到满足约束条件的转移矩阵。这样可以保证最终拟合出的抛物面不仅在形状上符合标准方程,而且在位置和方向上也满足偏馈天线的实际需求。
⛳️ 运行结果
📣 部分代码
%% 辅助函数:旋转矩阵转欧拉角
function euler_angles = rotationMatrixToEuler(R)
% 将旋转矩阵转换为ZYX欧拉角
sy = sqrt(R(1,1) * R(1,1) + R(2,1) * R(2,1));
singular = sy < 1e-6;
if ~singular
x = atan2(R(3,2), R(3,3));
y = atan2(-R(3,1), sy);
z = atan2(R(2,1), R(1,1));
else
x = atan2(-R(2,3), R(2,2));
y = atan2(-R(3,1), sy);
z = 0;
end
euler_angles = [x, y, z];
end
🔗 参考文献
[1]张利彪.基于粒子群优化算法的研究[D].吉林大学,2004.
🍅更多创新智能优化算法模型和应用场景可扫描关注
1.机器学习/深度学习类:BP、SVM、RVM、DBN、LSSVM、ELM、KELM、HKELM、DELM、RELM、DHKELM、RF、SAE、LSTM、BiLSTM、GRU、BiGRU、PNN、CNN、XGBoost、LightGBM、TCN、BiTCN、ESN、Transformer、模糊小波神经网络、宽度学习等等均可~
方向涵盖风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、用电量预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
2.组合预测类:CNN/TCN/BiTCN/DBN/Transformer/Adaboost结合SVM、RVM、ELM、LSTM、BiLSTM、GRU、BiGRU、Attention机制类等均可(可任意搭配非常新颖)~
3.分解类:EMD、EEMD、VMD、REMD、FEEMD、TVFEMD、CEEMDAN、ICEEMDAN、SVMD、FMD、JMD等分解模型均可~
4.路径规划类:旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、 充电车辆路径规划(EVRP)、 双层车辆路径规划(2E-VRP)、 油电混合车辆路径规划、 船舶航迹规划、 全路径规划规划、 仓储巡逻、公交车时间调度、水库调度优化、多式联运优化等等~
5.小众优化类:生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位、冷链、时间窗、多车场等、选址优化、港口岸桥调度优化、交通阻抗、重分配、停机位分配、机场航班调度、通信上传下载分配优化、微电网优化、无功优化、配电网重构、储能配置、有序充电、MPPT优化、家庭用电、电/冷/热负荷预测、电力设备故障诊断、电池管理系统(BMS)SOC/SOH估算(粒子滤波/卡尔曼滤波)、 多目标优化在电力系统调度中的应用、光伏MPPT控制算法改进(扰动观察法/电导增量法)、电动汽车充放电优化、微电网日前日内优化、储能优化、家庭用电优化、供应链优化\智能电网分布式能源经济优化调度,虚拟电厂,能源消纳,风光出力,控制策略,多目标优化,博弈能源调度,鲁棒优化等等均可~
6.原创改进优化算法(适合需要创新的同学):原创改进2025年的波动光学优化算法WOO以及三国优化算法TKOA、白鲸优化算法BWO等任意优化算法均可,保证测试函数效果,一般可直接核心

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献63条内容
已为社区贡献63条内容

所有评论(0)