AI动画生成:工程落地的跨模态挑战与突破
·
AI辅助动画生成框架在工程领域(如工业仿真、建筑设计、产品演示)落地时,其核心挑战在于确保生成的动画内容严格符合物理规律、工程规范和特定领域的专业知识。跨模态对齐是实现这一目标的关键,但面临多重瓶颈。
一、 核心跨模态对齐瓶颈
| 对齐维度 | 具体瓶颈与挑战 | 对工程落地的影响 |
|---|---|---|
| 文本/语音指令与动态视觉序列的对齐 | 1. 时序与因果逻辑歧义:自然语言指令(如“缓慢打开阀门,然后管道压力上升”)在时间粒度、动作并发性上存在模糊性,AI可能生成时序错乱或因果倒置的动画。 2. 空间关系与运动路径模糊:指令中的空间描述(如“绕到设备后方检查”)难以精确映射到三维场景中的相机路径和物体运动轨迹。 |
导致生成的动画流程不符合标准操作规程(SOP),可能传达错误的操作顺序或空间关系,在培训或仿真中引发误导。 |
| 静态设计数据(CAD/BIM)与动态行为仿真的对齐 | 1. 几何信息与物理属性的脱节:CAD模型通常只包含几何形状和装配关系,缺乏材料、质量、摩擦系数等驱动物理仿真的关键属性。 2. 层级结构与运动约束缺失:设计数据中的装配树未必能直接转化为物理仿真所需的关节、铰链等运动学约束。 |
动画缺乏物理真实性(如零件碰撞穿模、运动不符合力学原理),无法用于严肃的工程分析、应力测试或安全评估。 |
| 物理规律约束与视觉表现的对齐 | 1. 高保真物理模拟与实时生成的矛盾:工程动画常需模拟流体、刚体、柔性体等复杂相互作用。高精度物理计算(如有限元分析)耗时极长,与AI生成所需的实时或快速迭代需求冲突。 2. “视觉合理”与“物理精确”的权衡:扩散模型等AI方法倾向于生成视觉上“合理”的帧,但可能违反质量守恒、动量守恒等基本物理定律。 |
动画只能用于概览演示,无法作为可靠的工程依据。在需要对物理过程进行预测性仿真的场景(如流体分析、碰撞测试)中可信度低。 |
| 领域知识(规则、标准)与生成内容的对齐 | 1. 隐性知识难以编码:工程领域存在大量行业规范、安全标准、最佳实践等隐性知识,难以全面转化为AI可理解的显式规则或训练数据。 2. 长尾场景覆盖不足:训练数据多集中于常见场景,对于设备故障、极端工况等罕见但关键的长尾场景,AI生成内容容易出错。 |
可能生成不符合行业规范(如安全距离不足、警示标志缺失)或无法正确处理异常工况的动画,存在应用风险。 |
| 多模态输入间的统一表征与协同对齐 | 工程师的输入可能是混合模态的:草图 + 文字说明 + 数据表格。AI需要建立一个共享的语义空间,统一理解并协调这些异构输入,以生成一致的动画输出。当前框架在处理这种复杂、异步的多模态输入时能力有限。 | 框架易用性差,工程师需要花费大量时间将多模态想法“翻译”成AI能理解的单一模态指令,降低工作效率。 |
二、 关键技术瓶颈与解决方案推演
瓶颈1:从“视觉生成”到“物理因果生成”的跃迁
当前AI动画生成核心基于视觉模式的统计学习,缺乏对底层物理因果机制的建模。
# 概念示例:结合神经物理场与生成模型的混合架构
import torch
import torch.nn as nn
class PhysicsAwareAnimationGenerator(nn.Module):
def __init__(self, visual_generator, physics_simulator):
super().__init__()
self.visual_gen = visual_generator # 如潜在扩散模型
self.physics_sim = physics_simulator # 如可微分物理引擎(如NVIDIA Warp、Taichi)
def forward(self, text_prompt, cad_geometry, initial_state):
# 1. 初始视觉概念生成
visual_concept = self.visual_gen(text_prompt, cad_geometry)
# 2. 物理仿真约束求解
# 将视觉概念中的运动意图转化为物理参数(力、速度、约束)
physical_params = self._intent_to_physics(visual_concept)
# 3. 运行可微分物理仿真,得到物理上合理的轨迹
# 关键:仿真过程是可微分的,梯度可回传至视觉生成器
physics_trajectory = self.physics_sim.solve(initial_state, physical_params)
# 4. 视觉渲染与物理轨迹对齐优化
# 通过对抗学习或损失函数,使生成的视觉序列贴近物理轨迹
final_animation = self._align_visual_to_physics(visual_concept, physics_trajectory)
return final_animation
def _intent_to_physics(self, visual_concept):
# 使用一个小型网络从视觉特征中预测物理参数
# 例如,预测施加在刚体上的力和扭矩
pass
def _align_visual_to_physics(self, visual_frames, physics_states):
# 定义对齐损失函数:如物体位置误差、运动一致性误差
loss = compute_physics_alignment_loss(visual_frames, physics_states)
# 通过优化使视觉生成器学会遵守物理约束
self.visual_gen.adjust(loss)
return refined_frames
- 解决方案方向:采用**“神经物理场”** 或可微分物理引擎与生成模型耦合的架构。生成模型负责初始创意和视觉外观,物理引擎作为强约束层,确保运动遵循物理定律。通过可微分设计,物理约束的误差可以反向传播,指导生成模型的训练。
瓶颈2:工程数据到仿真模型的自动化、高保真转换
将CAD/BIM等设计数据自动转换为可用于AI生成和物理仿真的富语义模型是一大挑战。
# 概念示例:工程数据到仿真模型的转换配置与增强管道
pipeline:
step_1: geometry_parsing
input: cad_file.step
output: watertight_mesh.obj
module: cad_to_mesh_converter
step_2: semantic_enrichment
input: watertight_mesh.obj
output: enriched_model.gltf
actions:
- component_identification: # 基于几何和上下文识别零件
classifier: pointnet++_fine_tuned
- material_assignment: # 从知识库或用户输入分配物理属性
default_material: steel
source: material_library.json
- kinematic_constraint_inference: # 推断运动副
rule_based: sliding_joint_if_cylindrical
learning_based: gnn_for_assembly
- functional_annotation: # 标注功能(如“泵”、“阀门”)
ontology: industrial_equipment_ontology.ttl
step_3: simulation_ready_representation
input: enriched_model.gltf
output: unified_scene_graph.usd # 使用USD等开放格式
features:
- hierarchical_structure
- physical_properties
- kinematic_constraints
- material_shaders
- 解决方案方向:构建工程知识增强的转换管道。结合基于规则的推理(如:圆柱面配合推断为旋转副)与深度学习模型(如图神经网络识别装配关系),自动从几何数据中提取和补充物理属性、运动约束及功能语义,输出为USD(通用场景描述)等包含丰富语义和属性的统一场景图格式。
瓶颈3:复杂、长尾工程场景的泛化与可控性
工程场景复杂多样,且对安全性要求极高,要求生成框架具备处理罕见场景和细粒度控制的能力。
- 解决方案方向:
- 混合专家模型:针对不同子领域(流体、结构、运动学)训练专用“专家”生成模型,由路由网络根据输入指令调用相应专家。
- 基于检索的增强生成:建立工程动画案例库。生成时,先检索相似场景的已知正确动画或仿真数据,作为参考或约束条件,引导生成过程,提高长尾场景的可靠性。
- 人在回路的可控生成:提供多维度的控制接口(如时间线编辑、关键帧草图、物理参数滑块),允许工程师在生成过程中进行干预和修正,将AI定位为“增强智能”的协作工具而非全自动黑箱。
三、 总结与展望
AI辅助动画生成在工程领域的落地,核心是从“视觉内容生成”升级为“符合工程语义与物理规律的动态系统仿真与可视化”。突破跨模态对齐瓶颈需要:
- 架构创新:深度融合可微分物理仿真与生成式AI,实现物理因果约束下的创作。
- 数据管道革新:构建从工程数据到富语义仿真模型的自动化、智能化转换流程。
- 交互范式演进:发展以工程师为中心、支持细粒度控制和知识注入的混合智能协作模式。
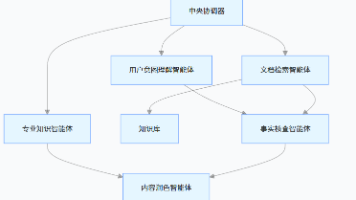
未来的框架将是生成模型、物理引擎、工程知识图谱和人在回路交互的有机综合体,其价值不在于完全替代人工,而在于将工程师从繁琐的、重复性的动画制作中解放出来,聚焦于更高层次的创意、决策与验证。
参考来源

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 14
14 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)