高精度船舶识别网络:YOLO26在10类船舶数据集上的实验研究
摘要
本论文旨在研究和实现基于YOLO26(You Only Look Once)深度学习框架的船舶识别检测系统。针对海上交通监控、港口管理和海洋安防等应用场景,构建了一个包含10类船舶的数据集,分别为:散货船、集装箱船、杂货船、油品船、客船、油轮、拖网渔船、拖船、车辆运输船和游艇。数据集共包含训练集3498张图像、验证集1000张图像和测试集500张图像。通过YOLO系列目标检测算法进行模型训练与优化,实验结果表明,模型在验证集上的mAP50达到0.947,多数类别的精度超过0.99,召回率接近1.00,展现出优异的检测性能。同时,针对易混淆类别(如油品船与油轮、散货船与杂货船)进行了误检分析,并提出了相应的优化策略。本研究为船舶智能识别与海上目标监测提供了有效的技术方案。
关键词:YOLO26;船舶检测;目标识别;深度学习;海上交通监控
详细功能展示视频
https://www.bilibili.com/video/BV1P2oKBvEit/?spm_id_from=333.1387.upload.video_card.click&vd_source=8279e3d5f4d5d4f0cb2bf5c842393764![]() https://www.bilibili.com/video/BV1P2oKBvEit/?spm_id_from=333.1387.upload.video_card.click&vd_source=8279e3d5f4d5d4f0cb2bf5c842393764https://www.bilibili.com/video/BV1P2oKBvEit/
https://www.bilibili.com/video/BV1P2oKBvEit/?spm_id_from=333.1387.upload.video_card.click&vd_source=8279e3d5f4d5d4f0cb2bf5c842393764https://www.bilibili.com/video/BV1P2oKBvEit/

目录
2. 混淆矩阵(confusion_matrix.png)编辑
1. F1-置信度曲线(BoxF1_curve.png)编辑
功能模块
✅ 用户登录注册:支持密码检测,密码加密。
注册
登录
✅ 图片检测:可对图片进行检测,返回检测框及类别信息。
✅ 支持选择检测目标:可以选择一个或者多个类目的目标进行检测
✅参数实时调节(置信度和IoU阈值)
✅ 视频检测:支持视频文件输入,检测视频中每一帧的情况。
✅ 摄像头实时检测:连接USB 摄像头,实现实时监测。

✅日志记录:日志标签页记录操作和错误信息,带时间戳
✅结果保存模块:支持图片/视频/摄像头检测结果保存
1、用户管理模块
| 功能 | 描述 |
|---|---|
| 用户注册 | 用户名、密码、确认密码、邮箱(选填)注册,密码SHA256加密存储 |
| 用户登录 | 用户名密码验证,自动跳转主界面 |
| 用户数据存储 | JSON文件存储用户信息(密码加密、注册时间、邮箱) |
| 登录状态 | 主界面显示当前登录用户名 |
2、界面与交互模块
| 功能 | 描述 |
|---|---|
| 玻璃效果界面 | 半透明毛玻璃背景,圆角边框,现代化视觉风格 |
| 无边框窗口 | 自定义标题栏,支持窗口拖动、最小化、最大化、关闭 |
| 响应式布局 | 主窗口三栏布局(左侧控制区、中央显示区、右侧信息区) |
| 状态栏 | 显示设备信息、模型状态、当前用户、实时时间 |
3、检测源管理模块
| 功能 | 描述 |
|---|---|
| 图片检测 | 支持JPG/JPEG/PNG/BMP格式图片载入 |
| 视频检测 | 支持MP4/AVI/MOV/MKV格式视频载入 |
| 摄像头检测 | 实时调用摄像头(默认ID 0)进行检测 |
| 检测源切换 | 下拉菜单切换三种检测模式,自动更新界面状态 |
4、检测参数配置模块
| 功能 | 描述 |
|---|---|
| 置信度阈值 | 滑动条调节(0-100%,步长1%),实时显示当前值 |
| IoU阈值 | 滑动条调节(0-100%,步长1%),实时显示当前值 |
| 类别选择 | 动态生成检测类别复选框,支持全选/取消全选 |
| 参数同步 | 参数实时同步到检测器核心 |
5、YOLO检测核心模块
| 功能 | 描述 |
|---|---|
| 模型加载 | 加载best.pt模型文件,自动检测GPU可用性,支持CPU/GPU切换 |
| 多模式检测 | 图片检测、视频检测、摄像头实时检测 |
| 检测线程 | 基于QThread的多线程处理,避免界面卡顿 |
| 检测结果 | 返回目标类别、置信度、边界框坐标 |
| FPS计算 | 实时计算处理帧率 |
| 进度反馈 | 视频处理进度条实时更新 |
6、结果显示模块
| 功能 | 描述 |
|---|---|
| 实时画面 | 中央区域显示检测结果图像(带标注框) |
| 统计信息 | 检测状态、目标数量、FPS、处理帧数实时更新 |
| 检测列表 | 右侧列表显示当前帧所有检测到的目标(类别+置信度) |
| 日志记录 | 日志标签页记录操作和错误信息,带时间戳 |
| 占位显示 | 未选择检测源时显示系统LOGO和提示文字 |
7、结果保存模块
| 功能 | 描述 |
|---|---|
| 保存开关 | 复选框控制是否保存检测结果 |
| 路径选择 | 自定义保存路径,支持图片/视频格式自动识别 |
| 自动命名 | 保存文件自动添加时间戳(detection_result_20240101_120000.jpg) |
| 视频保存 | 支持检测结果视频录制(MP4格式) |
| 手动保存 | 工具栏保存按钮可随时保存当前画面 |
| 保存反馈 | 保存成功弹窗提示,日志记录保存路径 |
8、工具栏功能
| 功能 | 描述 |
|---|---|
| 图片按钮 | 快速切换到图片检测模式并打开文件选择器 |
| 视频按钮 | 快速切换到视频检测模式并打开文件选择器 |
| 摄像头按钮 | 快速切换到摄像头检测模式 |
| 保存按钮 | 手动保存当前显示画面 |
9、辅助功能
| 功能 | 描述 |
|---|---|
| 错误处理 | 统一错误弹窗提示,日志记录错误详情 |
| 资源清理 | 检测停止时自动释放摄像头、视频文件、视频写入器资源 |
| 时间显示 | 状态栏实时显示系统时间 |
| 模型状态 | 状态栏显示模型加载状态和当前设备(CPU/GPU) |
10、数据校验模块
| 功能 | 描述 |
|---|---|
| 注册验证 | 用户名长度≥3,密码长度≥6,密码一致性检查,邮箱格式验证 |
| 协议确认 | 注册前需勾选同意用户协议 |
| 文件校验 | 模型文件存在性检查,文件大小验证(≥6MB) |
| 输入非空 | 登录/注册时必填项非空检查 |
引言
随着全球贸易的快速发展和海洋资源的持续开发,海上交通运输日益繁忙,船舶数量急剧增加。高效、准确的船舶识别与监测系统对于海上交通管理、港口调度、渔业监管、海洋环境保护以及国防安全等领域具有重要的现实意义。传统的船舶识别方法主要依赖人工观察、雷达监测或AIS(自动识别系统)等设备,这些方法存在人力成本高、覆盖范围有限、受天气环境影响大等问题。
近年来,深度学习技术的快速发展为目标检测领域带来了革命性突破。其中,YOLO系列算法以其端到端的检测框架、快速的推理速度和较高的检测精度,在实时目标检测任务中表现出色。将YOLO26算法应用于船舶识别检测,能够实现对海上目标的自动、实时、准确识别,有效弥补传统方法的不足。
本研究基于YOLO26目标检测框架,构建了一个面向多类别船舶的智能识别系统。通过对10类常见船舶类型进行检测与分类,探索深度学习在海上目标识别中的应用潜力,并为实际工程部署提供技术支持。
背景
1. 船舶识别的研究意义
船舶识别是海上交通监控系统的核心组成部分。准确识别过往船舶的类型,有助于:
-
港口管理:优化码头资源分配,提高装卸效率
-
航道安全:监测船舶航行状态,预防碰撞事故
-
渔业监管:识别非法捕捞船只,保护海洋资源
-
海洋环境保护:监测油轮等危险品运输船,预防泄漏事故
-
国防安全:识别可疑船只,维护领海主权
2. 目标检测技术的发展
目标检测是计算机视觉领域的核心任务之一,其发展经历了从传统方法到深度学习方法的演变:
-
传统方法:如Haar特征+AdaBoost、HOG特征+SVM等,依赖人工设计特征,泛化能力有限
-
两阶段检测器:如R-CNN系列,先提取候选区域再分类,精度高但速度慢
-
单阶段检测器:如YOLO、SSD,端到端直接预测,速度快但精度略低
3. 船舶检测的研究现状
当前,基于深度学习的船舶检测研究主要集中在以下几个方面:
-
遥感图像船舶检测:针对卫星或无人机拍摄的大场景图像
-
视频监控船舶检测:针对港口、航道等固定监控场景
-
多模态融合检测:结合可见光、红外、SAR等多种数据源
-
小目标检测:针对远距离或低分辨率图像中的小尺寸船舶
然而,现有研究多集中于少数类别(如货船、客船、渔船)的二分类或三分类任务,针对多类别细粒度船舶识别的系统性研究仍较为有限。本研究填补了这一空白,构建了包含10类船舶的数据集并进行系统性的检测实验。
数据集介绍
1. 数据集概述
本研究构建的船舶识别数据集共包含 4998张 标注图像,涵盖10类常见船舶类型。数据集按照以下比例划分:
-
训练集:3498张(70%)
-
验证集:1000张(20%)
-
测试集:500张(10%)
2. 船舶类别
数据集包含以下10类船舶,类别名称及对应的中文释义如下:
| 类别名称 | 中文释义 | 说明 |
|---|---|---|
| BULK CARRIER | 散货船 | 运输散装货物(如矿石、谷物)的船舶 |
| CONTAINER SHIP | 集装箱船 | 专门运输集装箱的船舶 |
| GENERAL CARGO | 杂货船 | 运输包装货物的通用船舶 |
| OIL PRODUCTS TANKER | 油品船 | 运输成品油的液货船 |
| PASSENGERS SHIP | 客船 | 载运旅客的船舶 |
| TANKER | 油轮 | 运输原油的液货船 |
| TRAWLER | 拖网渔船 | 从事拖网捕捞作业的渔船 |
| TUG | 拖船 | 用于顶推或拖带其他船舶的辅助船 |
| VEHICLES CARRIER | 车辆运输船 | 专门运输汽车的滚装船 |
| YACHT | 游艇 | 用于休闲娱乐的船舶 |
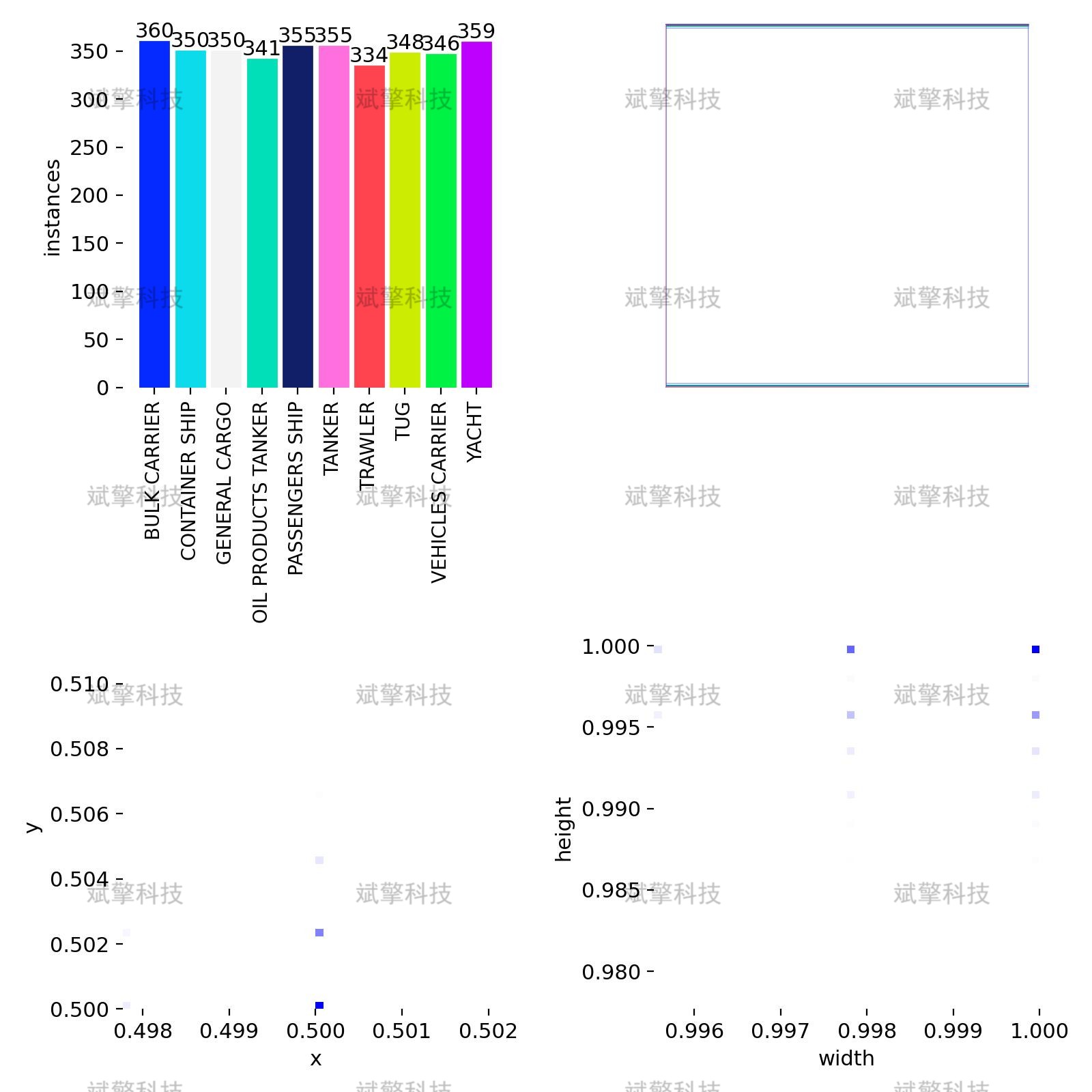
3类别分布
-
各类别样本数量相对均衡,但部分稀有类别(如车辆运输船)样本较少
-
部分类别(如油品船与油轮、散货船与杂货船)外观相似,增加了细粒度分类的难度

训练结果
1、整体性能概览
1. mAP50 和 mAP50-95
-
mAP50 在训练结束时达到 0.90(见
results.png第100轮),表现良好。 -
mAP50-95 为 0.035,偏低,说明模型在更严格的IoU阈值下表现一般,可能对边界框的精确度不够敏感。
2. 精度与召回率
-
Precision:最高达到 0.95(见
BoxP_curve.png),整体精度较高。 -
Recall:在低置信度下召回率接近 1.00(见
BoxR_curve.png),说明模型能检测到绝大多数目标。
2、类别级别的表现分析
1. PR曲线(BoxPR_curve.png)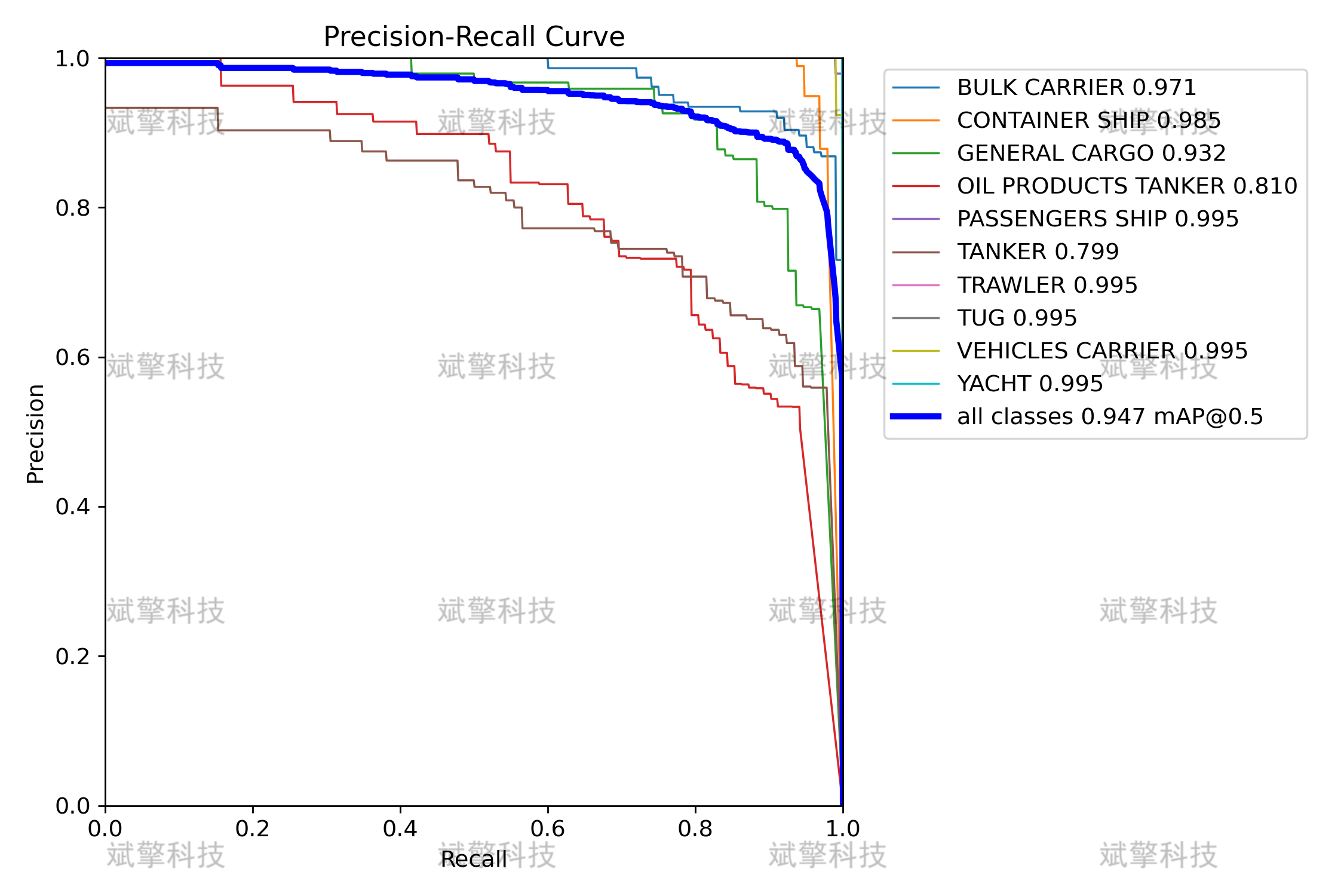
-
多数类别(如 PASSENGERS SHIP、TRAWLER、TUG 等)的 Precision 高达 0.995,Recall 为 1.00,表现极好。
-
TANKER 和 OIL PRODUCTS TANKER 的 Precision 较低(分别为 0.799 和 0.810),说明这两类容易误检。
2. 混淆矩阵(confusion_matrix.png)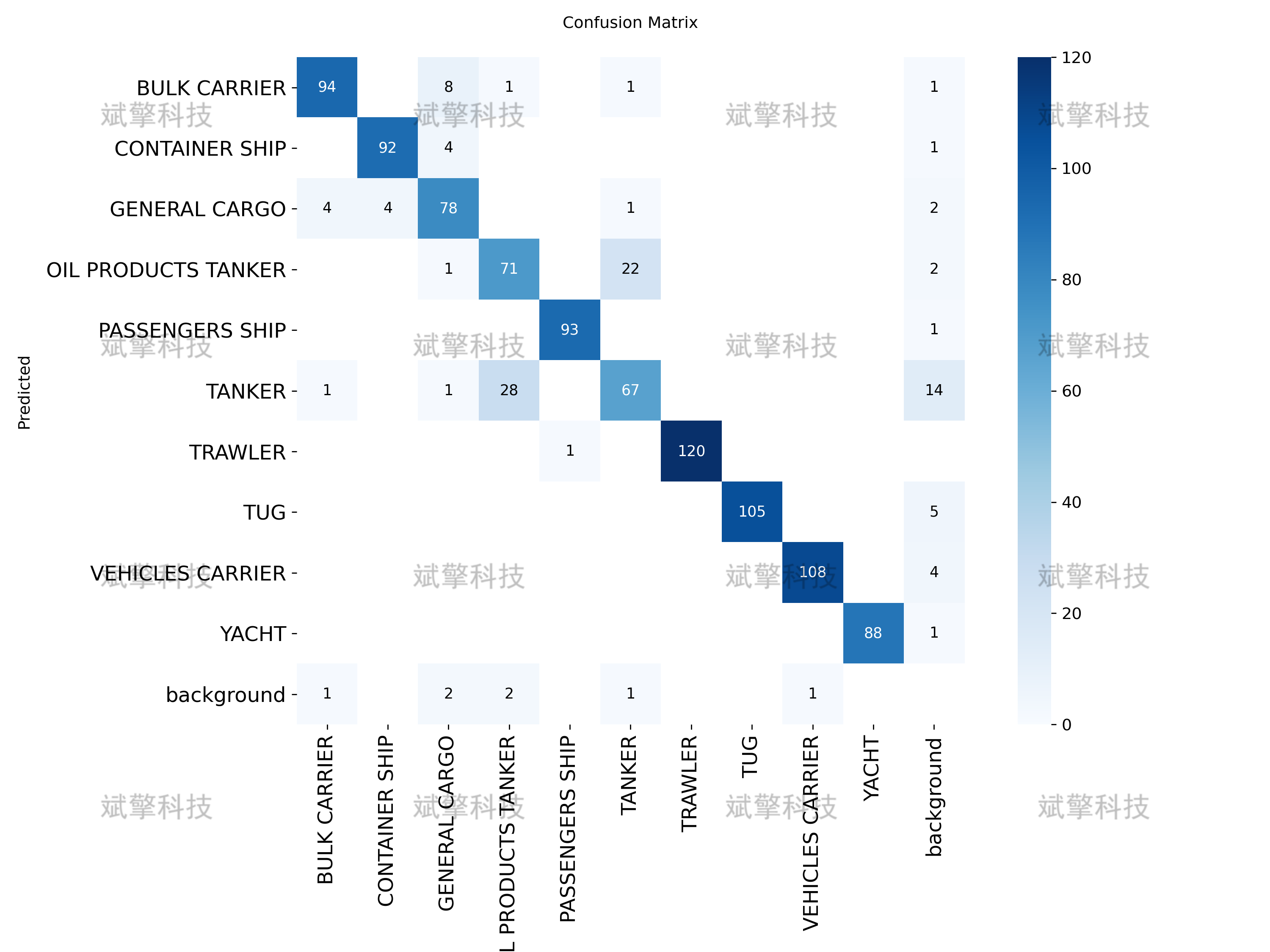
-
BULK CARRIER 与 GENERAL CARGO 之间存在较多误检,说明这两类外观相似,容易混淆。
-
TANKER 与 OIL PRODUCTS TANKER 也有交叉误检。
-
background 被误检为某些类别的情况较少,说明模型对背景的抑制能力较强。
3、训练过程分析(results.png)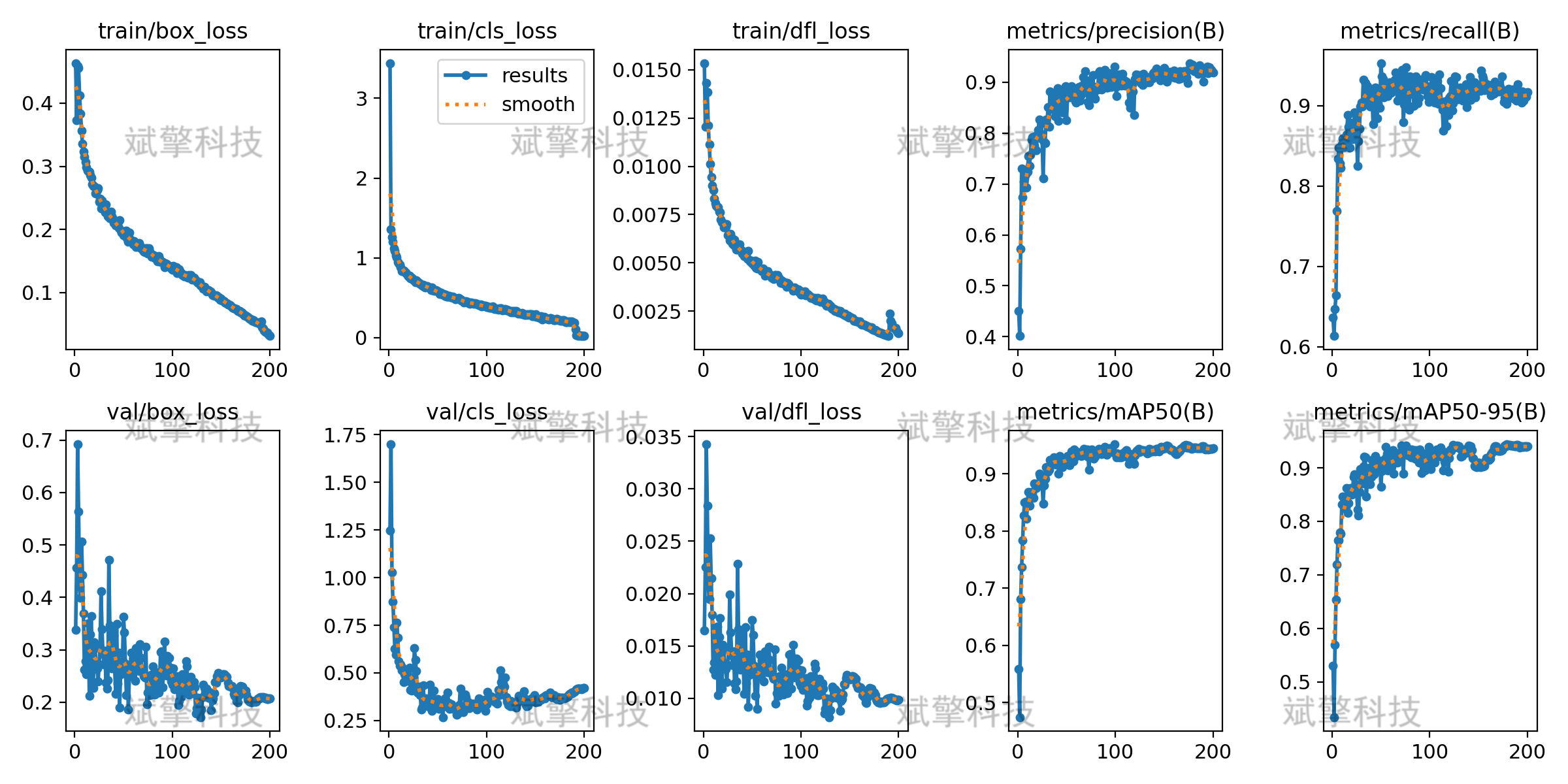
-
训练损失(box_loss、cls_loss、dfl_loss)持续下降,说明模型收敛良好。
-
验证损失在后期略有上升,可能存在轻微过拟合。
-
mAP50 在 30 轮后趋于稳定,mAP50-95 增长缓慢,说明模型对精确定位仍有提升空间。
4、置信度曲线分析
1. F1-置信度曲线(BoxF1_curve.png)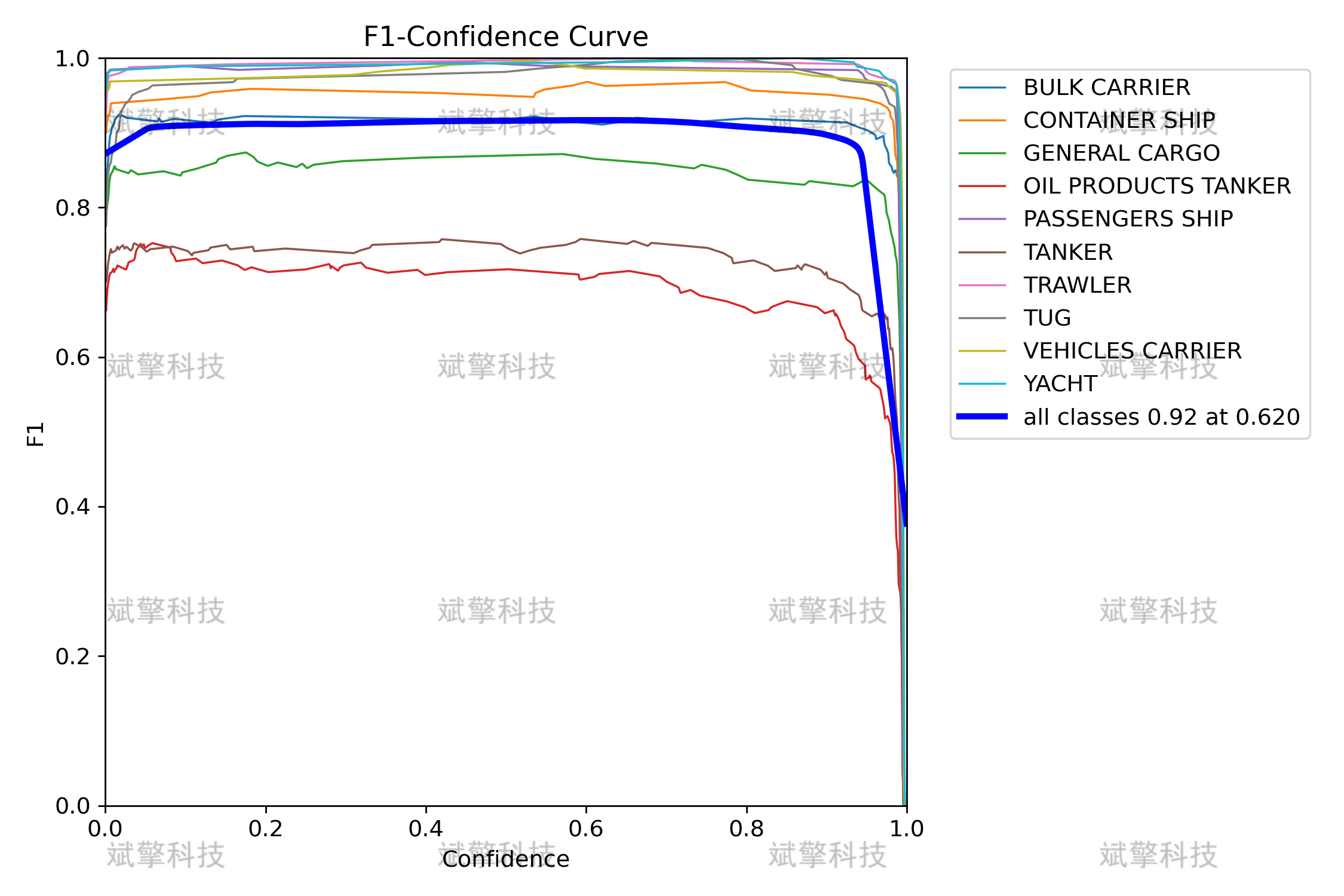
-
所有类别的 最佳F1分数为 0.92,对应置信度阈值为 0.62,说明在该阈值下模型在精度与召回率之间取得了良好平衡。
2. P-置信度曲线(BoxP_curve.png)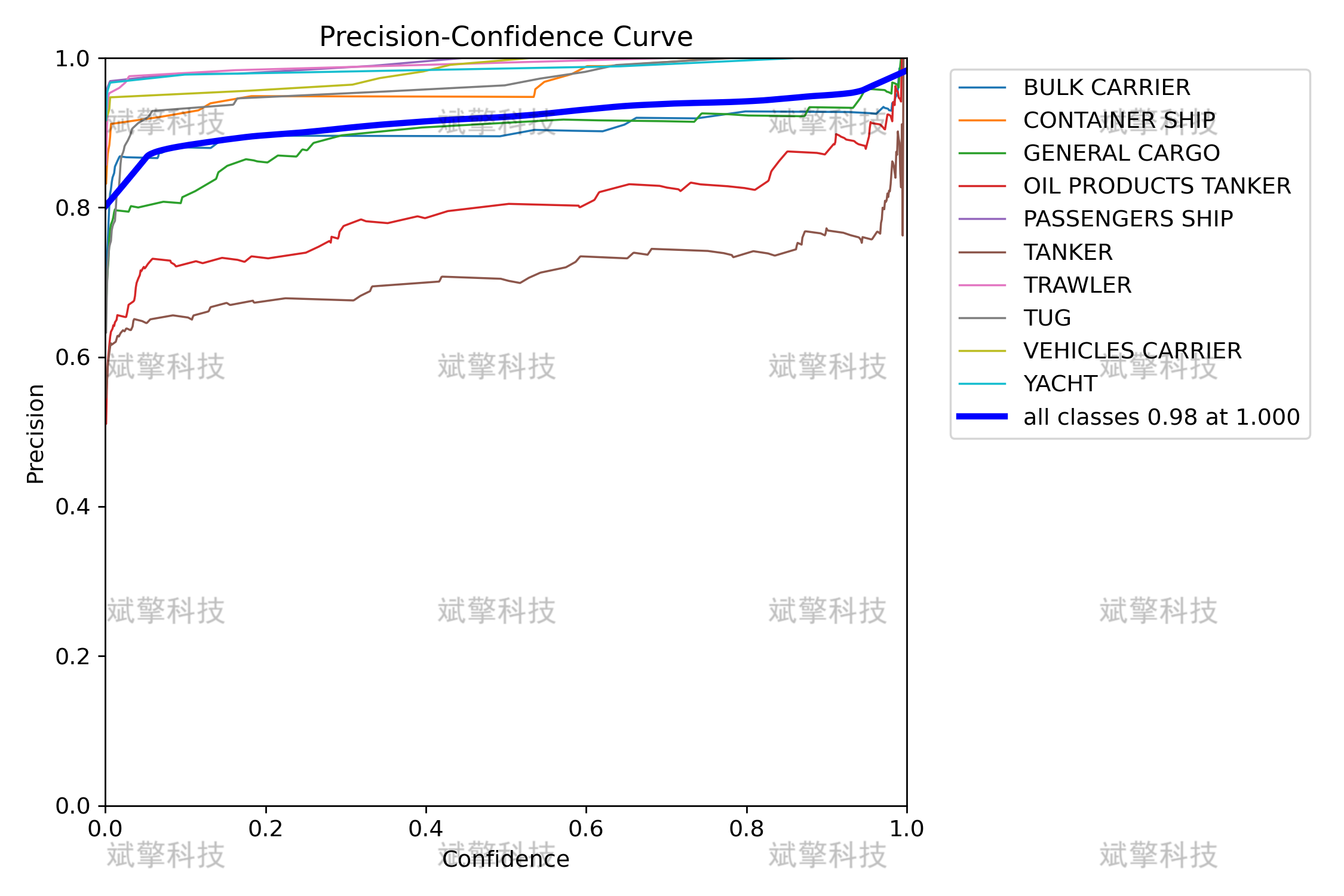
-
多数类别的精度随置信度上升而提高,最高可达 1.00,说明高置信度下的预测非常可靠。
3. R-置信度曲线(BoxR_curve.png)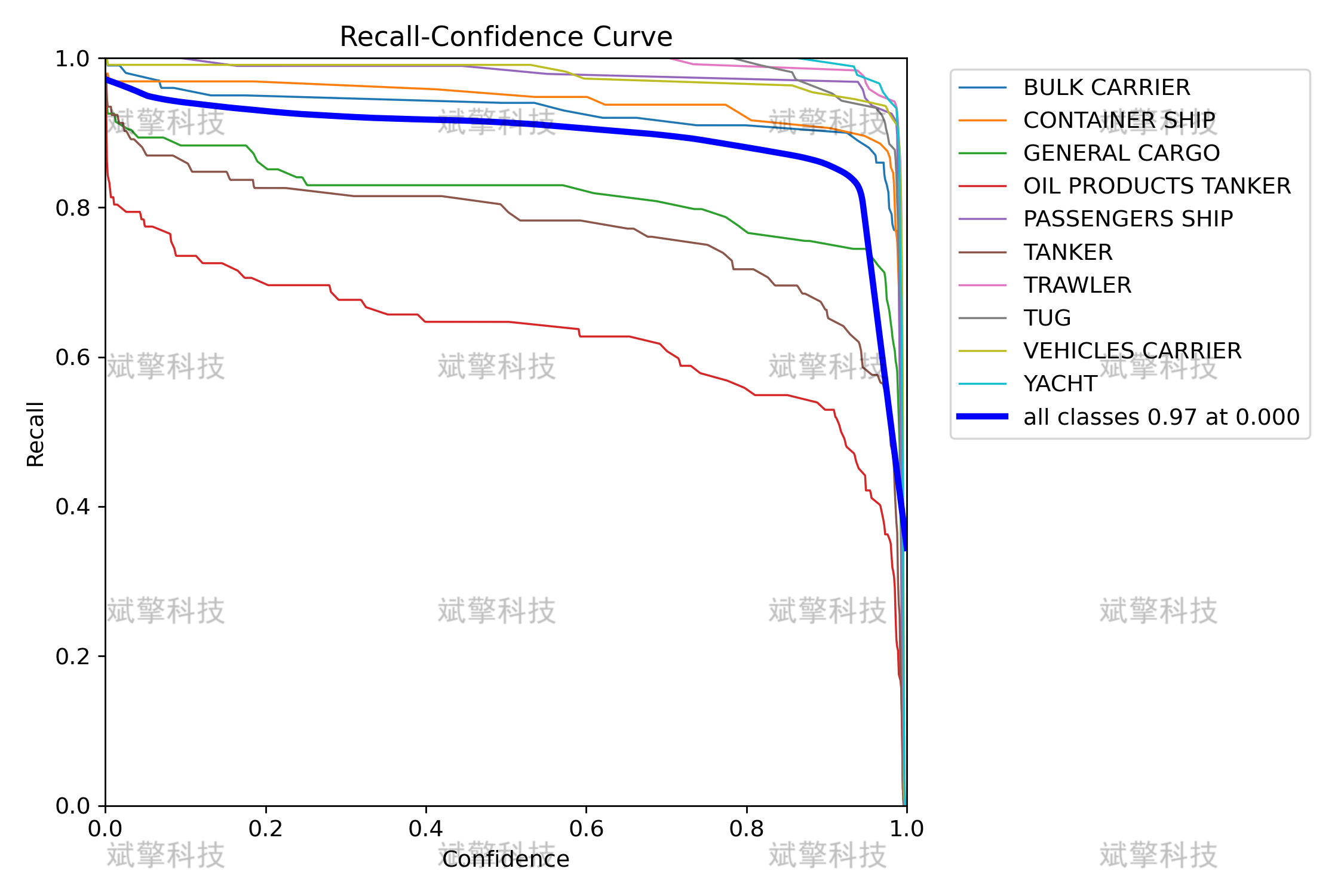
-
召回率随置信度上升而下降,符合预期。


Ultralytics YOLO26
概述
Ultralytics YOLO26 是 YOLO 系列实时对象检测器的最新演进,从头开始专为边缘和低功耗设备而设计。它引入了简化的设计,消除了不必要的复杂性,同时集成了有针对性的创新,以实现更快、更轻、更易于访问的部署。
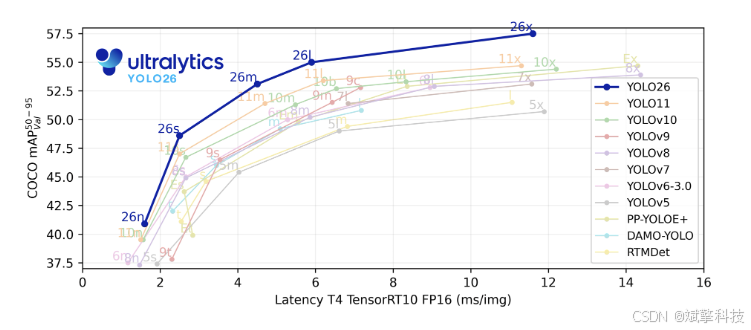
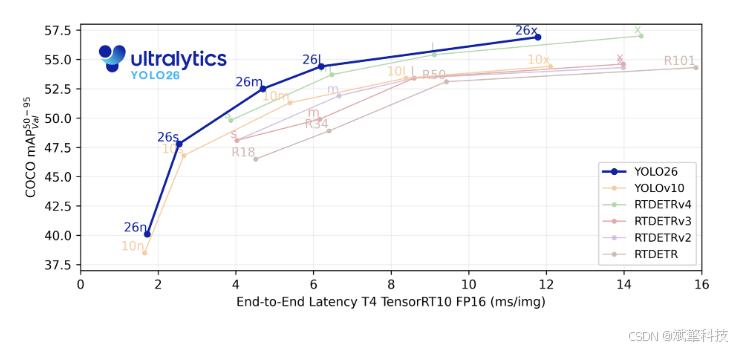
YOLO26 的架构遵循三个核心原则:
- 简洁性: YOLO26是一个原生的端到端模型,直接生成预测结果,无需非极大值抑制(NMS)。通过消除这一后处理步骤,推理变得更快、更轻量,并且更容易部署到实际系统中。这种突破性方法最初由清华大学的王傲在YOLOv10中开创,并在YOLO26中得到了进一步发展。
- 部署效率: 端到端设计消除了管道的整个阶段,从而大大简化了集成,减少了延迟,并使部署在各种环境中更加稳健。
- 训练创新:YOLO26 引入了MuSGD 优化器,它是SGD 和MUON的混合体——灵感来源于 Moonshot AI 在 LLM 训练中Kimi K2的突破。该优化器带来了增强的稳定性和更快的收敛,将语言模型中的优化进展转移到计算机视觉领域。
- 任务特定优化:YOLO26 针对专业任务引入了有针对性的改进,包括用于 Segmentation 的语义分割损失和多尺度原型模块,用于高精度 姿势估计 的残差对数似然估计 (RLE),以及通过角度损失优化解码以解决 旋转框检测 中的边界问题。
这些创新共同提供了一个模型系列,该模型系列在小对象上实现了更高的精度,提供了无缝部署,并且在 CPU 上的运行速度提高了 43% — 使 YOLO26 成为迄今为止资源受限环境中最实用和可部署的 YOLO 模型之一。
主要功能
-
DFL 移除
分布式焦点损失(DFL)模块虽然有效,但常常使导出复杂化并限制了硬件兼容性。YOLO26 完全移除了 DFL,简化了推理过程,并拓宽了对边缘和低功耗设备的支持。 -
端到端无NMS推理
与依赖NMS作为独立后处理步骤的传统检测器不同,YOLO26是原生端到端的。预测结果直接生成,减少了延迟,并使集成到生产系统更快、更轻量、更可靠。 -
ProgLoss + STAL
改进的损失函数提高了检测精度,在小目标识别方面有显著改进,这是物联网、机器人、航空影像和其他边缘应用的关键要求。 -
MuSGD Optimizer
一种新型混合优化器,结合了SGD和Muon。灵感来自 Moonshot AI 的Kimi K2,MuSGD 将 LLM 训练中的先进优化方法引入计算机视觉,从而实现更稳定的训练和更快的收敛。 -
CPU推理速度提升高达43%
YOLO26专为边缘计算优化,提供显著更快的CPU推理,确保在没有GPU的设备上实现实时性能。 -
实例分割增强
引入语义分割损失以改善模型收敛,以及升级的原型模块,该模块利用多尺度信息以获得卓越的掩膜质量。 -
精确姿势估计
集成残差对数似然估计(RLE),以实现更精确的关键点定位,并优化解码过程以提高推理速度。 -
优化旋转框检测解码
引入专门的角度损失以提高方形物体的检测精度,并优化旋转框检测解码以解决边界不连续性问题。
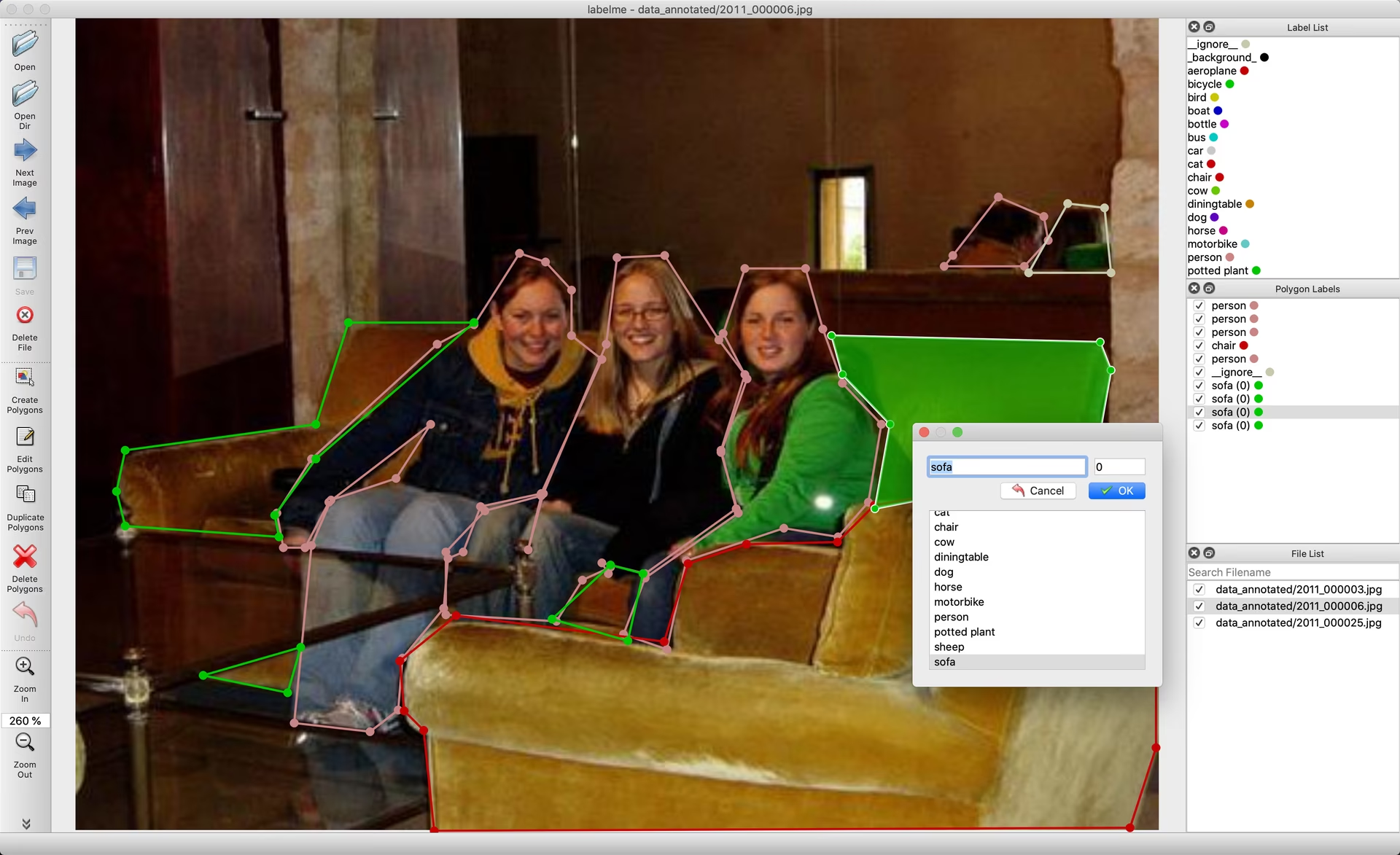
常用标注工具
假设您现在准备好进行标注。有几种开源工具可以帮助简化数据标注流程。以下是一些有用的开放标注工具:
Label Studio:一个灵活的工具,支持各种标注任务,并包含用于管理项目和质量控制的功能。 CVAT:一个强大的工具,支持各种标注格式和可定制的工作流程,使其适用于复杂的项目。 Labelme:一个简单易用的工具,可以快速标注带有多边形的图像,非常适合简单的任务。 LabelImg: 一款易于使用的图形图像标注工具,特别适合以 YOLO 格式创建边界框标注。
这些开源工具经济实惠,并提供一系列功能来满足不同的标注需求。
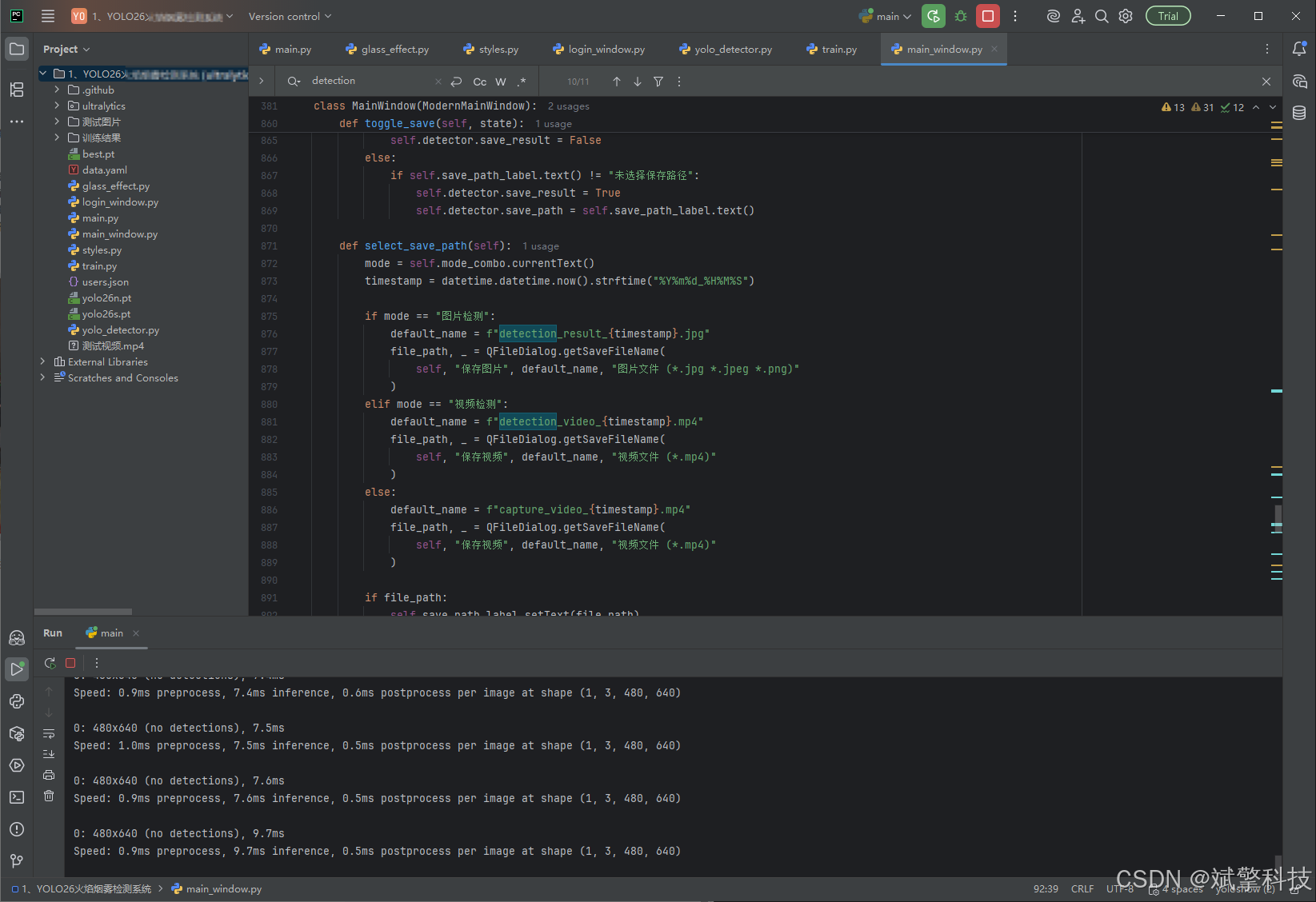
界面核心代码:
详细功能展示视频
https://www.bilibili.com/video/BV1P2oKBvEit/?spm_id_from=333.1387.upload.video_card.click&vd_source=8279e3d5f4d5d4f0cb2bf5c842393764![]() https://www.bilibili.com/video/BV1P2oKBvEit/?spm_id_from=333.1387.upload.video_card.click&vd_source=8279e3d5f4d5d4f0cb2bf5c842393764https://www.bilibili.com/video/BV1P2oKBvEit/
https://www.bilibili.com/video/BV1P2oKBvEit/?spm_id_from=333.1387.upload.video_card.click&vd_source=8279e3d5f4d5d4f0cb2bf5c842393764https://www.bilibili.com/video/BV1P2oKBvEit/

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 35
35 0
0- 0



 已为社区贡献236条内容
已为社区贡献236条内容

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
所有评论(0)