小偏差线性化模型,航空发动机线性化,非线性系统线性化,求解线性系统具体参数,最小二乘拟合
小偏差线性化模型,航空发动机线性化,非线性系统线性化,求解线性系统具体参数,最小二乘拟合 MATLAB/Simulink 航空发动机,非线性,线性,非线性系统,线性系统,最小二乘,拟合,小偏差,系统辨识
一、系统定位与工程背景
在航空发动机控制系统设计与动态特性分析领域,非线性系统的线性化建模是核心技术环节之一。由于航空发动机在不同工况下呈现强非线性特性,直接基于非线性模型进行控制器设计与仿真分析存在计算复杂度高、实时性差等问题。本系统针对这一工程痛点,基于小偏差线性化理论与最小二乘参数辨识算法,构建了从非线性响应数据到线性化状态空间模型的完整转化流程,可在指定平衡点附近将复杂的非线性系统近似为线性模型,为后续控制器设计、稳定性分析、故障诊断等工程应用提供高精度、低复杂度的基础模型支撑。
二、系统整体架构与工作流
系统采用模块化设计思想,将建模过程拆解为“数据输入-预处理-参数辨识-模型构建-仿真验证-结果输出”六大环节,各环节通过函数调用与数据传递形成闭环工作流。具体架构如下图所示:
graph TD
A[原始非线性数据] --> B[数据预处理模块]
B --> C[参数辨识核心模块]
C --> D[状态空间模型构建]
D --> E[仿真验证模块]
E --> F[结果输出:模型参数+拟合曲线+误差指标]
G[配置参数:工作点+数据区间+仿真步长] --> B
G --> E各模块的核心职责与数据流向明确,确保建模过程的可追溯性与可复现性,同时便于后续功能扩展与算法优化。
三、核心文件功能深度解析
(一)主控制文件:main.m
作为系统的“中枢神经”,main.m承担全局流程控制、参数配置、模块调度与结果展示功能,其核心逻辑分为以下7个步骤:
1. 环境初始化与参数配置
- 环境清理:通过
clc(清空命令行)、clear all(清空工作空间变量)、close all(关闭所有图形窗口),消除历史数据与图形对建模过程的干扰,确保每次运行的独立性。 - 基础参数定义:
- 工作点参数:设置燃油流量基准值
wf0=1800、尾喷管面积基准值a80=3970,构成输入变量的平衡点u0=[wf0 a80]; - 数据区间参数:定义平衡点数据的起始索引
sindex=1201与结束索引eindex=2001,确保截取稳定工况下的非线性响应数据。
2. 数据预处理与偏差计算
- 从加载的原始数据
y中,截取目标区间(sindex:eindex)的关键输出变量: y1:高压转速(第4列数据)相对于平衡点的偏差值,即y(sindex:eindex,4)-y(sindex,4);y2:涡轮前温度相关参数(第5列数据)相对于平衡点的偏差值,即y(sindex:eindex,5)-y(sindex,5);- 计算偏差序列的最大值(
maxn1、maxn2),为后续模型响应幅度验证提供参考。
3. 核心模块调用:func.m函数调用
通过[A,B,C]=func(y,u0,sindex,eindex)调用核心算法模块,传入原始数据、输入平衡点、数据区间参数,求解状态空间模型的核心矩阵:
A:状态转移矩阵(2×2),描述无输入扰动时状态变量的动态演化规律;B:输入矩阵(2×2),描述输入变量对状态变量的影响程度;C:输出矩阵(2×2),描述状态变量到输出变量的映射关系。
4. 状态空间模型构建
- 定义直接传输矩阵
D=0(假设输入与输出无直接耦合,符合航空发动机常见动态特性); - 通过
sys_ss=ss(A,B,C,D,0.025)构建离散时间状态空间模型,采样时间0.025s匹配工程实际数据采集频率。
5. 动态响应仿真
- 生成输入扰动信号:
u(:,1)=0.05u0(1)ones(m,1)、u(:,2)=0.05u0(2)ones(m,1),即输入变量在平衡点基础上叠加5%的阶跃扰动,模拟实际工况下的输入变化; - 调用
lsim(sys_ss,u,t)进行仿真,计算线性化模型在输入扰动下的输出响应y3,其中时间向量t=0:0.025:20覆盖20秒动态过程,确保捕捉完整的暂态与稳态响应。
6. 拟合精度量化评估
采用相对误差均值作为精度指标,计算公式如下:
e1(1)=sum(abs(y1(2:end)-y3(2:end,1))./y3(2:end,1))/800:高压转速偏差的相对误差均值;e2(1)=sum(abs(y2(2:end)-y3(2:end,2))./y3(2:end,2))/800:涡轮前温度相关参数偏差的相对误差均值;
该指标可有效量化线性化模型与原始非线性系统的一致性,误差越小,模型精度越高。
7. 结果可视化展示
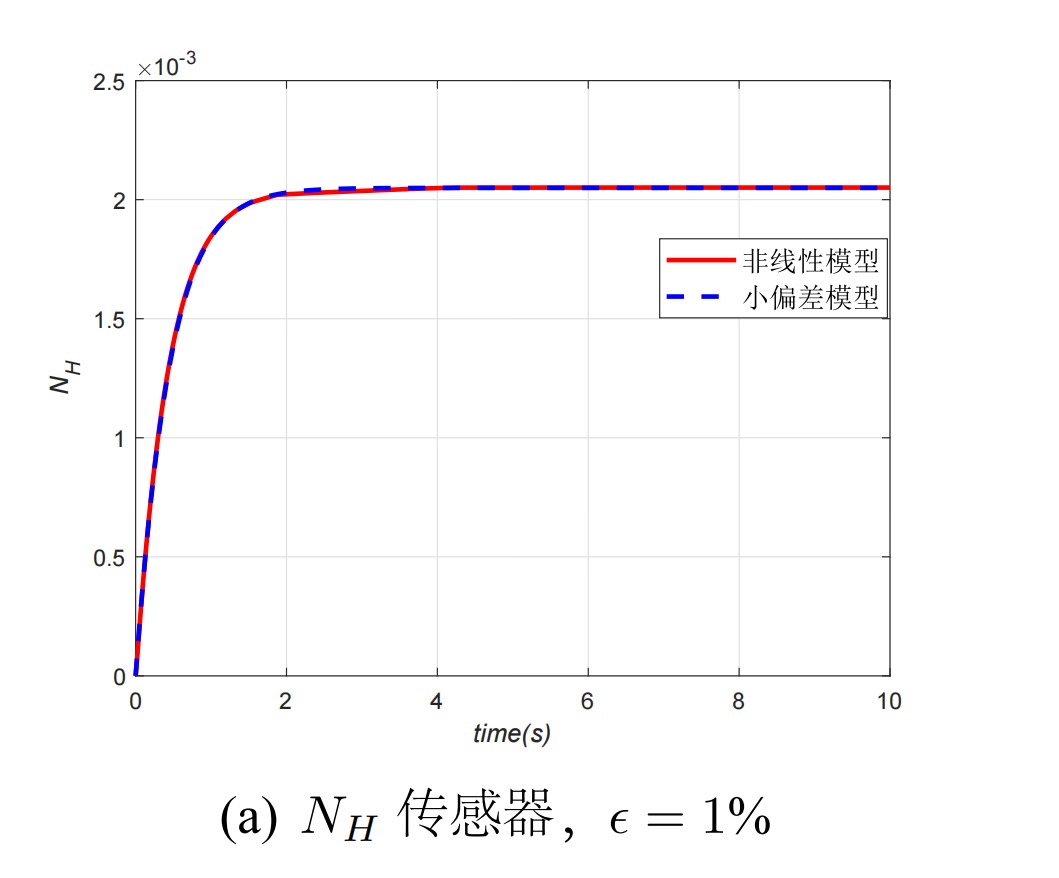
- 图88:对比高压转速偏差的非线性响应(红色实线)与线性化模型响应(蓝色虚线),横轴为时间(s),纵轴为高压转速偏差;
- 图89:对比涡轮前温度相关参数偏差的非线性响应(红色实线)与线性化模型响应(蓝色虚线),横轴为时间(s),纵轴为涡轮前温度相关参数偏差;
- 图形设置:通过
linewidth=2增强曲线清晰度,legend标注曲线含义,grid on添加网格便于数据读取,Interpreter='latex'确保坐标轴标签的数学符号格式正确。
(二)核心算法模块:func.m
作为系统的“核心引擎”,func.m实现从预处理数据到状态空间模型参数的关键转化,其内部逻辑分为6个核心步骤:
1. 平衡点提取与状态/输出变量定义
- 从目标数据区间的起始点(
sindex)提取平衡点参数: - 状态变量平衡点
x0:a=y(st,4)(高压转速)、b=y(st,3)(低压转速),即x0=[a b]; - 输出变量平衡点
y0:a=y(st,4)(高压转速)、c=y(st,5)(涡轮前温度相关参数),即y0=[a c]; - 该步骤是小偏差线性化的基础,确保线性化模型围绕稳定平衡点构建。
2. 归一化矩阵构建与偏差归一化
- 构建归一化矩阵:
Nx=diag(x0)(状态变量归一化矩阵)、Nu=diag(u0)(输入变量归一化矩阵)、Ny=diag(y0)(输出变量归一化矩阵),均为对角矩阵,对角元素为对应变量的平衡点数值; - 计算原始偏差序列:
Delta_y1:状态变量(高压转速、低压转速)相对于平衡点的绝对偏差;Delta_y2:输出变量(高压转速、涡轮前温度相关参数)相对于平衡点的绝对偏差;- 偏差归一化:通过
deltay1=inv(Nx)Deltay1(i,:)'、deltay2=inv(Ny)Deltay2(i,:)'将原始偏差转换为无量纲的归一化偏差,消除量纲差异(如转速单位“r/min”与燃油流量单位“kg/s”)对参数辨识精度的影响。
3. 分模块参数辨识(基于最小二乘优化)
采用lsqnonlin(非线性最小二乘优化函数),通过最小化“模型预测值与实际值的误差平方和”求解各模块参数,共分为4次独立优化:
(1)状态转移与输入耦合参数1:高压转速动态
- 优化目标函数:调用
fun.m,定义误差模型y=n1k-(e11n1+e12n2+f11wf+f12a8),其中e11、e12为状态转移系数,f11、f12为输入耦合系数; - 数据准备:
xdata为当前时刻归一化状态偏差与输入偏差,ydata为下一时刻归一化高压转速偏差; - 优化结果:得到
e11、e12、f11、f12,构成状态转移矩阵与输入矩阵的第一行参数。
(2)状态转移与输入耦合参数2:低压转速动态
- 优化逻辑与步骤(1)一致,仅将
ydata替换为“下一时刻归一化低压转速偏差”; - 优化结果:得到
e21、e22、f21、f22,构成状态转移矩阵与输入矩阵的第二行参数。
(3)输出映射参数1:高压转速输出
- 优化目标函数:调用
fun2.m,定义误差模型y=n1k-(c11n1+c12n2),其中c11、c12为状态变量到高压转速输出的映射系数; - 数据准备:
xdata为当前时刻归一化状态偏差,ydata为当前时刻归一化高压转速输出偏差; - 优化结果:得到
c11、c12,构成输出矩阵的第一行参数。
(4)输出映射参数2:涡轮前温度相关参数输出
- 优化逻辑与步骤(3)一致,仅将
ydata替换为“当前时刻归一化涡轮前温度相关参数输出偏差”; - 优化结果:得到
c21、c22,构成输出矩阵的第二行参数。
4. 归一化参数矩阵整合
- 状态转移矩阵
E=[e11 e12; e21 e22]; - 输入矩阵
F=[f11 f12; f21 f22]; - 输出矩阵
G=[c11 c12; c21 c22];
该步骤将4次优化得到的分散参数整合为完整的归一化模型矩阵,为后续反归一化奠定基础。
5. 反归一化:转换为物理意义参数矩阵
由于之前的参数辨识基于归一化偏差进行,需通过矩阵运算将归一化参数转换为具有实际物理意义的参数:
A=NxEinv(Nx):状态转移矩阵(物理坐标系);B=NxFinv(Nu):输入矩阵(物理坐标系);C=NyGinv(Nx):输出矩阵(物理坐标系);
反归一化后的矩阵参数直接反映实际物理量之间的动态关系,可直接用于工程分析与控制器设计。
6. 模型可控性与可观性分析
- 可观性秩计算:
ob=rank([C; C*A]'),若ob=2(状态变量维度),则模型完全可观,可通过输出变量重构所有状态变量; - 可控性秩计算:
con=rank([B; A*B]),若con=2(状态变量维度),则模型完全可控,可通过输入变量将状态变量调节到任意目标值;
该分析是后续控制器设计的前提,确保模型具备可控制、可观测的工程属性。
(三)目标函数文件:fun.m/fun2.m/fun3.m
作为参数辨识的“误差标尺”,这三个文件定义了最小二乘优化的误差计算模型,为参数求解提供目标函数支撑:
| 文件名称 | 输入参数 | 误差模型 | 核心用途 |
|---|---|---|---|
| fun.m | x(n1,n2,wf,a8,n1k) | y = n1k - (e11n1 + e12n2 + f11wf + f12a8) | 求解“状态变量+输入变量”对目标状态的耦合参数(如e11、f11等) |
| fun2.m | x(n1,n2,n1k) | y = n1k - (c11n1 + c12n2) | 求解“状态变量”对目标输出的映射参数(如c11、c12等) |
| fun3.m | x(n1,n2,wf,a8,n1k) | y = n1k - (c11n1 + c12n2 + d11wf + d12a8) | 扩展型输出映射模型,支持“状态变量+输入变量”对输出的直接耦合(备用功能,本系统暂未调用) |
三个目标函数的设计体现了“按需选择、灵活适配”的思想,可根据建模需求(是否考虑输入对输出的直接影响)选择对应的误差模型,提升系统的通用性。
四、关键技术亮点与工程价值
(一)核心技术亮点
- 归一化-反归一化处理:通过构建对角归一化矩阵,消除不同物理量的量纲差异,解决了“转速-燃油流量”等跨量级参数辨识精度低的问题,使参数辨识结果更稳定、可靠;
- 分模块参数辨识策略:将复杂的多变量参数辨识拆解为4次独立的单目标优化,降低了优化问题的维度与复杂度,避免了多变量耦合导致的算法不收敛问题;
- 量化与可视化双重验证:既通过相对误差均值量化模型精度,又通过对比曲线直观展示动态响应一致性,验证结果更全面、可信;
- 工程化细节优化:如设置合理的优化初始值(
x0=[0 0 0 0]或x0=[0 0])、匹配实际采样时间(0.025s)、优化图形展示格式,确保系统可直接应用于工程实践。
(二)工程价值
- 降低控制器设计复杂度:线性化模型可直接用于PID、LQR、MPC等线性控制器设计,避免了非线性控制器设计的高难度与高计算成本;
- 提升仿真分析效率:线性化模型的计算速度远快于非线性模型,可大幅缩短控制系统动态特性分析、稳定性验证的时间;
- 通用性强:通过调整工作点参数(
wf0、a80)与数据区间(sindex、eindex),可适配不同型号航空发动机的线性化建模需求; - 可扩展性好:预留
fun3.m扩展模型、可控性/可观性分析接口,便于后续增加输入-输出直接耦合、模型降阶等功能。
五、使用流程与注意事项
(一)标准使用流程
- 数据准备:确保原始数据
y格式正确,至少包含“低压转速(第3列)、高压转速(第4列)、涡轮前温度相关参数(第5列)”的时间序列数据; - 参数配置:在main.m中修改
wf0、a80(输入平衡点)、sindex、eindex(数据区间)、t(仿真时间)等参数,匹配具体发动机型号与工况; - 运行程序:直接运行main.m,系统自动完成数据预处理、参数辨识、仿真验证与结果输出;
- 结果分析:
- 查看误差指标e1、e2,若误差小于5%(工程常用阈值),则模型精度满足要求;
- 查看图88、图89,确保线性化模型响应与非线性响应的暂态趋势(上升时间、超调量)、稳态值一致; - 模型导出:从工作空间导出
sys_ss(状态空间模型)或A、B、C矩阵,用于后续控制器设计或仿真分析。
(二)注意事项
- 数据质量要求:原始数据需为稳定工况下的非线性响应数据,避免包含噪声过大或工况突变的数据段,否则会导致参数辨识精度下降;
- 工作点选择:
sindex应选择系统达到稳态后的时刻(如响应曲线趋于平缓的时间点),确保提取的平衡点参数准确; - 扰动幅度设置:输入扰动幅度(当前为5%)需根据发动机实际运行范围调整,避免扰动过大导致小偏差线性化假设失效(小偏差假设要求扰动幅度通常不超过10%);
- 算法收敛性:若
lsqnonlin算法不收敛,可调整优化初始值(如x0=[0.1 0.1 0.1 0.1])或通过optimset修改算法迭代次数、收敛阈值。
六、未来扩展方向
- 多工作点建模与插值:增加多个平衡点的线性化模型构建功能,通过插值算法实现全工况范围内的线性化建模,适配发动机从怠速到最大推力的全工况需求;
- 鲁棒参数辨识:引入抗噪声的鲁棒优化算法(如加权最小二乘、正则化最小二乘),提升系统在噪声数据下的参数辨识精度;
- 模型降阶功能:增加平衡截断法、奇异值分解法等模型降阶算法,在保证精度的前提下降低模型维度,提升实时控制效率;
- 图形化用户界面(GUI)开发:设计可视化操作界面,支持数据导入、参数配置、结果展示的可视化操作,降低非专业人员的使用门槛;
- 与控制算法集成:直接集成PID、LQR控制器设计模块,实现“线性化建模-控制器设计-闭环仿真”的一站式解决方案。
本系统通过严谨的数学建模、工程化的代码实现与全面的验证机制,为航空发动机小偏差线性化建模提供了一套高效、可靠的技术方案,兼具理论深度与工程实用性,可作为航空发动机控制系统开发的核心支撑工具。

小偏差线性化模型,航空发动机线性化,非线性系统线性化,求解线性系统具体参数,最小二乘拟合 MATLAB/Simulink 航空发动机,非线性,线性,非线性系统,线性系统,最小二乘,拟合,小偏差,系统辨识

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献47条内容
已为社区贡献47条内容

所有评论(0)