MATLAB代码:计及“源-荷双重不确定性”的虚拟电厂/微网日前随机优化调度模型
MATLAB代码:计及源-荷双重不确定性的虚拟电厂/微网日前随机优化调度 关键词:虚拟电厂/微网 随机优化 随机调度 源-荷双重不确定性 虚拟电厂调度 参考文档:《Virtual power plant mid-term dispatch optimization》参考其燃气轮机、以及储能部分模型,另外随机优化算法也是和该文档一致; 仿真平台:MATLAB+CPLEX 主要内容:代码主要做的是一个虚拟电厂或者微网单元的日前优化调度模型,考虑了光伏出力和负荷功率的双重不确定性,采用随机规划法处理不确定性变量,构建了虚拟电厂随机优化调度模型。 具体来看,首先是基于蒙特卡洛算法,对预测的光伏以及负荷曲线进行场景生成,然后基于快概率距离快速消除法进行削减,直至削减至5个场景,然后采用随机调度的方法,对多场景下的虚拟电厂调度策略进行优化,程序实现效果良好一行一注释
一、代码概述
本套MATLAB代码旨在实现计及源-荷双重不确定性的虚拟电厂(微网)日前随机优化调度。通过蒙特卡洛算法生成光伏出力与负荷功率的多场景样本,结合快概率距离快速消除法进行场景削减,最终基于随机规划理论构建优化模型,在满足各类设备约束条件下,实现虚拟电厂内燃气轮机、储能系统、光伏单元的协同调度及电网购售电优化,核心目标是最小化调度总成本。代码整体依赖MATLAB平台与CPLEX求解器,结构清晰、模块划分明确,具备良好的可复现性与扩展性。
二、核心文件及模块划分
代码包含3个核心文件,分别对应场景生成与削减、优化调度模型两大核心功能模块,各文件职责与关联关系如下:
| 文件名称 | 核心功能 | 所属模块 | 依赖关系 |
|---|---|---|---|
| ploadcs.m | 负荷功率场景生成与削减 | 场景处理模块 | 独立运行,输出削减后的5个负荷场景 |
| ppvcs.m | 光伏出力场景生成与削减 | 场景处理模块 | 独立运行,输出削减后的5个光伏场景 |
| stochastic_vpp.m | 虚拟电厂随机优化调度主程序 | 优化调度模块 | 依赖前两个文件生成的场景数据,调用CPLEX求解 |
三、各模块详细功能解析
(一)场景处理模块:生成与削减不确定性场景
场景处理模块通过蒙特卡洛模拟生成大量不确定性场景,再通过场景削减算法筛选出代表性场景,既保证对不确定性的覆盖度,又降低优化模型的计算复杂度。该模块包含负荷场景处理(ploadcs.m)与光伏场景处理(ppvcs.m)两个完全独立的子程序,实现逻辑高度一致。
1. 核心功能流程
- 参数初始化
- 定义基础数据:输入24小时负荷/光伏出力预测均值向量Ww(单位:MW),涵盖一天内各时刻的预测基准值。
- 场景规模配置:设置场景生成数量m=200,即通过蒙特卡洛算法生成200个初始场景。
- 不确定性参数:设定标准差l=W0.1(W=0.3Ww为调整后的基准值),表示负荷/光伏出力的波动范围为预测值的10%,符合实际工程中不确定性波动区间(5%-20%)的设定。 - 场景生成
- 基于标准正态分布随机数生成场景:每个场景的24小时出力数据通过公式s=W+l.*randn(1,24)计算,其中randn(1,24)生成服从标准正态分布的200组24维随机向量,模拟负荷/光伏出力的随机波动特性。
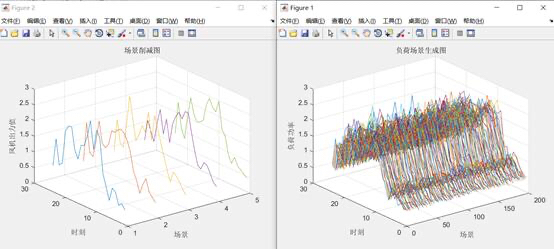
- 场景可视化:通过plot3函数绘制3D图(x轴:场景序号,y轴:时刻,z轴:功率值),直观展示200个初始场景的分布情况,生成“负荷/光伏场景生成图”。 - 场景削减
- 初始概率设定:蒙特卡洛生成的场景为等概率场景,因此初始化概率向量pi=1/mones(m,1),每个场景初始概率为1/200。
- 距离计算:定义几何距离x(i,j)=sum(abs(Ws(i,:)-Ws(j,:))),计算任意两个场景间的24小时出力曲线绝对误差之和,量化场景相似度。
- 概率距离之和计算:通过y(i)=1/msum(x(i,:))计算每个场景与所有其他场景的概率加权距离之和,反映场景的“代表性”——y值越小,场景越接近整体场景集合的中心,代表性越强。
- 迭代削减:循环删除代表性最弱的场景,直至剩余5个场景: - 找到
y值最小的场景d(最不具代表性); - 找到与场景
d几何距离最近的场景r; - 将场景
d的概率合并至场景r(pi(r)=pi(r)+pi(d)); - 删除场景
d及其对应的概率、距离数据;
- 削减结果可视化:绘制削减后5个场景的3D分布图,生成“场景削减图”,展示最终筛选出的代表性场景。
2. 模块输出
- 削减后的场景矩阵:
Wsf(负荷场景)/Wsd(光伏场景),维度为5×24,每行对应一个场景的24小时出力数据。 - 场景概率向量:
pi,维度为5×1,存储5个场景的发生概率(总和为1)。 - 可视化图表:初始场景生成图与削减后场景图,用于验证场景生成与削减的合理性。
(二)优化调度模块:随机优化模型构建与求解
优化调度模块(stochastic_vpp.m)是核心主程序,基于场景处理模块生成的5个负荷场景与5个光伏场景,构建包含多元设备的虚拟电厂随机优化调度模型,通过CPLEX求解器找到最优调度策略。
1. 模型基础配置
- 核心假设与边界条件
- 调度周期:24小时日前调度,时间步长为1小时。
- 不确定性处理:考虑光伏出力与负荷功率的双重不确定性,采用5×5=25个联合场景覆盖不确定性组合。
- 设备组成:虚拟电厂包含光伏单元(不可控)、负荷单元(可中断)、燃气轮机(可控电源)、储能系统(可充放电),且具备与大电网的购售电权限。 - 输入参数定义
- 场景数据:直接输入经削减后的5×24光伏场景矩阵ppv与5×24负荷场景矩阵pload(对应场景处理模块的输出)。
- 市场电价:购电电价xb(24维向量,单位:元/MWh)与售电电价xs(xs=1.05*xs1,xs1为基础售电电价,含5%溢价),随时间分段变化。
- 设备参数:
| 设备类型 | 核心参数 | 取值/说明 |
|----------|----------|-----------|
| 燃气轮机 | 固定开机费用a| 600元 |
| | 分段线性化费用kcp| 100元/(MW·h) |
| | 启停费用sconv| 100元 |
| | 出力上下限gtmax/gtmin| 3.31/1.3 MW |
| | 爬坡率ramp| 1.5 MW/h |
| 储能系统 | 充放电功率上限gescmax/gesdmax| 1 MW |
| | 蓄电量上下限sessmax/sessmin| 4/0 MWh |
| | 充放电效率uesc/uesd| 0.95 |
| 电网交互 | 最大交易量pmgmax| 20 MW |
| 负荷中断 | 补偿费用kil| [500,700,800]元/MWh |
2. 决策变量定义
模型采用两类变量(确定性变量与场景依赖变量),共定义12类决策变量,覆盖设备运行状态、功率输出、能量存储等核心调度决策:
| 变量类型 | 变量名称 | 维度 | 物理意义 |
|---|---|---|---|
| 二进制变量 | umob/umos |
1×24 | 电网购电/售电状态(0=不操作,1=操作) |
| | xconv/yconv | 1×24 | 燃气轮机工作状态(0=停机,1=运行)/启停状态(0=无启停,1=启停) |
| | umobpf/umospf | 5×5×24 | 各场景下电网购电/售电状态 |
| | xconvpf/yconvpf | 5×5×24 | 各场景下燃气轮机工作/启停状态 |
| 连续变量 | pmgb/pmgs | 1×24 | 电网购电/售电量(MW) |
| | pmt | 1×24 | 燃气轮机出力(MW) |
| | gesc/gesd | 1×24 | 储能充电/放电功率(MW) |
MATLAB代码:计及源-荷双重不确定性的虚拟电厂/微网日前随机优化调度 关键词:虚拟电厂/微网 随机优化 随机调度 源-荷双重不确定性 虚拟电厂调度 参考文档:《Virtual power plant mid-term dispatch optimization》参考其燃气轮机、以及储能部分模型,另外随机优化算法也是和该文档一致; 仿真平台:MATLAB+CPLEX 主要内容:代码主要做的是一个虚拟电厂或者微网单元的日前优化调度模型,考虑了光伏出力和负荷功率的双重不确定性,采用随机规划法处理不确定性变量,构建了虚拟电厂随机优化调度模型。 具体来看,首先是基于蒙特卡洛算法,对预测的光伏以及负荷曲线进行场景生成,然后基于快概率距离快速消除法进行削减,直至削减至5个场景,然后采用随机调度的方法,对多场景下的虚拟电厂调度策略进行优化,程序实现效果良好一行一注释
| | sess | 1×24 | 储能蓄电量(MWh) |
| | pmgbpf/pmgspf | 5×5×24 | 各场景下电网购电/售电量(MW) |
| | pmtpf | 5×5×24 | 各场景下燃气轮机出力(MW) |
| | gescpf/gesdpf | 5×5×24 | 各场景下储能充/放电功率(MW) |
| | sesspf | 5×5×24 | 各场景下储能蓄电量(MWh) |
3. 约束条件构建
约束条件共分为5大类,覆盖设备运行物理约束、系统功率平衡约束、不确定性场景一致性约束,确保调度方案的可行性与安全性:
- 燃气轮机约束
- 出力上下限约束:xconvpf(p,f,t)gtmin <= pmtpf(p,f,t) <= xconvpf(p,f,t)gtmax,仅当燃气轮机运行(xconvpf=1)时才有出力。
- 爬坡率约束:-ramp <= pmtpf(p,f,t) - pmtpf(p,f,t-1) <= ramp,限制相邻时刻出力变化速率,避免设备损坏。
- 启停约束:xconvpf(p,f,t) - xconvpf(p,f,t-1) <= yconvpf(p,f,t),启停状态变量yconvpf标记运行状态的切换。 - 电网购售电约束
- 状态互斥约束:0 <= umobpf(p,f,t) + umospf(p,f,t) <= 1,同一时刻不能同时购电与售电。
- 功率上限约束:0 <= pmgbpf(p,f,t) <= umobpf(p,f,t)*pmgmax,购售电量不超过最大交易量,且仅当对应状态变量为1时才有功率流动。 - 储能系统约束
- 充放电功率约束:0 <= gescpf(p,f,t) <= gescmax、0 <= gesdpf(p,f,t) <= gesdmax,限制充放电功率在安全范围。
- 蓄电量约束:0 <= sesspf(p,f,t) <= sessmax,避免储能过充或过放。
- 能量平衡约束:sesspf(p,f,t) = sesspf(p,f,t-1) + gescpf(p,f,t)uesc - gesdpf(p,f,t)/uesd,考虑充放电效率的能量传递关系;初始时刻session(p,f,1) = gescpf(p,f,1)uesc - gesdpf(p,f,1)/uesd。 - 系统功率平衡约束
- 核心约束:gescpf(p,f,t) + pload(p,t) + pmgspf(p,f,t) = gesdpf(p,f,t) + ppv(f,t) + pmgbpf(p,f,t) + pmtpf(p,f,t),确保各场景下每个时刻的输入功率与输出功率平衡:
- 输入功率:储能充电功率、负荷功率、售电功率;
- 输出功率:储能放电功率、光伏出力、购电功率、燃气轮机出力。 - 场景一致性约束(随机优化核心)
- 要求确定性变量在所有场景下保持一致:umospf(p,f,t)=umos(t)、pmgbpf(p,f,t)=pmgb(t)等,即燃气轮机启停状态、储能充放电策略、电网购售电计划等核心决策不随场景变化,确保调度方案的鲁棒性。
4. 目标函数构建
目标函数为最小化虚拟电厂24小时调度总成本,包含燃气轮机运行成本与电网购售电成本两部分,采用场景概率加权求和:
$$F = F{21} + F{11}$$
- 燃气轮机运行成本
F21:包含固定开机费用、出力线性费用、启停费用,按场景概率加权计算:
$$f2(t) = \sum{p=1}^5\sum{f=1}^5 0.2 \times 0.2 \times (a \cdot xconvpf(p,f,t) + kcp \cdot pmtpf(p,f,t) + sconv \cdot yconvpf(p,f,t))$$
$$F{21} = \sum{t=1}^{24} f2(t)$$
其中0.2×0.2为每个联合场景的发生概率(5个负荷场景与5个光伏场景均为等概率分布)。
- 电网购售电成本
F11:购电成本减去售电收益,按场景概率加权计算:
$$f1(t) = \sum{p=1}^5\sum{f=1}^5 0.04 \times (pmgbpf(p,f,t) \cdot xb(t) - pmgspf(p,f,t) \cdot xs(t))$$
$$F{11} = \sum{t=1}^{24} f1(t)$$
5. 求解与结果输出
- 求解配置:调用CPLEX求解器,设置求解参数
sdpsettings('solver','cplex','verbose',2,'usex0',0),其中混合整数规划间隙mipgap=1e-6,确保求解精度。 - 结果验证:若求解成功(
result.problem==0),读取各决策变量的最优值;否则输出“求解出错”提示。 - 可视化输出:生成两类核心图表:
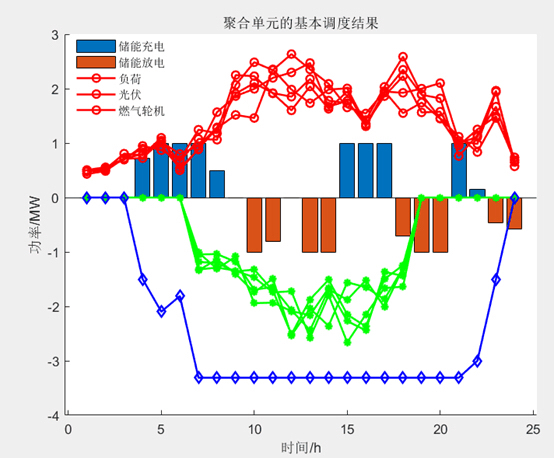
- 聚合单元基本调度结果图:以柱状图展示储能充放电功率,折线图展示负荷、光伏、燃气轮机出力,直观呈现各单元24小时功率平衡情况。
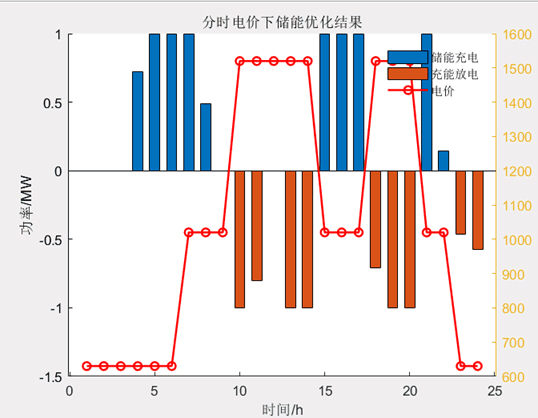
- 分时电价下储能优化结果图:左侧纵轴展示储能充放电功率,右侧纵轴展示购电电价,体现储能系统“峰谷套利”的调度逻辑——电价低谷时充电、电价高峰时放电。
四、代码核心特点与创新点
- 双重不确定性处理:通过蒙特卡洛场景生成+概率距离削减的组合方法,高效覆盖光伏与负荷的不确定性,在计算复杂度与场景代表性之间实现平衡。
- 鲁棒性调度设计:场景一致性约束确保核心调度决策(如燃气轮机启停、储能充放电计划)在所有不确定性场景下保持一致,避免因场景波动导致调度方案失效。
- 多元设备协同优化:整合可控电源(燃气轮机)、储能系统、电网交互等调节资源,实现源-荷-储-网的协同调度,最大化虚拟电厂运行经济性。
- 可视化程度高:各模块均包含直观的可视化图表,便于用户验证场景生成、削减及调度结果的合理性,降低代码调试与结果分析难度。
五、运行环境与使用说明
- 运行环境要求
- 软件版本:MATLAB R2016b及以上版本。
- 求解器:需安装CPLEX 12.6及以上版本,并确保MATLAB与CPLEX成功关联。
- 硬件配置:建议CPU主频2.0GHz以上,内存8GB以上(支持25场景联合优化的高效求解)。 - 使用步骤
- 运行
ploadcs.m:生成负荷场景生成图、场景削减图及5个负荷场景数据。 - 运行
ppvcs.m:生成光伏场景生成图、场景削减图及5个光伏场景数据。 - 运行
stochastic_vpp.m:在代码中替换ppv与pload为前两步生成的场景数据,执行后得到最优调度结果及可视化图表。 - 参数调整建议
- 场景数量:可通过修改ploadcs.m与ppvcs.m中的m(初始场景数)和削减终止条件(k>5)调整场景数量,建议范围3-10个(数量越多,精度越高但计算时间越长)。
- 设备参数:可根据实际虚拟电厂配置修改燃气轮机出力上下限、储能容量、电价等参数,需确保参数单位一致性(均为MW、MWh、元/MWh)。
- 不确定性波动:通过调整l=W*0.1中的系数(0.05-0.2)改变光伏/负荷的波动幅度,适配不同地区的不确定性水平。
六、注意事项与常见问题
- 求解器关联问题:若出现“无法找到CPLEX求解器”,需在MATLAB中通过
addpath命令添加CPLEX安装路径下的matlab文件夹。 - 场景数据一致性:
stochastic_vpp.m中的ppv与pload矩阵维度必须为5×24,若修改场景削减数量(如削减至3个场景),需同步调整ppv、pload维度及代码中场景循环次数(p=1:5、f=1:5)。 - 约束冲突问题:若求解提示“无可行解”,可检查燃气轮机爬坡率、储能充放电功率上限等约束是否过于严格,建议适当放宽爬坡率或储能功率约束后重新求解。
- 可视化图表显示问题:若图表未正常显示,需确保MATLAB的图形窗口未被关闭,且代码中
hold on命令使用正确(避免后续绘图覆盖前文内容)。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 1
1 0
0- 0



 已为社区贡献49条内容
已为社区贡献49条内容

所有评论(0)