基于RBF神经网络的车速预测模型与能量管理策略参考 基于训练工况与测试工况的时序车速预测分析 ...
基于RBF神经网络车速预测模型,根据历史车速信息,预测未来预测时域内的车速信息的时序预测模型,根据预测的信息对车辆进行控制可以对混动汽车的能量管理具有一定的参考意义 1.文件包括,训练工况(.mat数据,工况可自己选取最好与想要预测的工况类似,如预测工况是城郊工况,训练工况最好也选择同类的)以及测试工况(.mat数据, 自己选取想要预测的工况),以及REF预测主程序(.m程序) 2.程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的车速预测部分,或其他时序预测类也可参考(坡度预测、流量预测等),大家根据相关论文多多拓展思路
概述
本文档旨在对一套基于径向基函数(Radial Basis Function, RBF)神经网络的车速时序预测系统进行功能说明。该系统利用历史车速数据构建预测模型,能够对未来若干时间步长内的车速进行有效预测。预测结果可为混合动力汽车的能量管理策略提供关键输入,从而优化整车能效、提升驾驶平顺性并延长电池寿命。
基于RBF神经网络车速预测模型,根据历史车速信息,预测未来预测时域内的车速信息的时序预测模型,根据预测的信息对车辆进行控制可以对混动汽车的能量管理具有一定的参考意义 1.文件包括,训练工况(.mat数据,工况可自己选取最好与想要预测的工况类似,如预测工况是城郊工况,训练工况最好也选择同类的)以及测试工况(.mat数据, 自己选取想要预测的工况),以及REF预测主程序(.m程序) 2.程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的车速预测部分,或其他时序预测类也可参考(坡度预测、流量预测等),大家根据相关论文多多拓展思路
整个系统采用模块化设计,包含数据预处理、模型训练、测试评估及结果可视化四大核心流程,所有代码均基于 MATLAB 实现,具备良好的可复现性与扩展性。
系统架构与工作流程
1. 数据准备阶段
系统依赖两组外部数据文件:
- 训练集(
xunlian或xunlian_1):用于构建和训练 RBF 神经网络模型。 - 测试集(
ceshi):用于评估模型在未见数据上的泛化能力。
系统首先加载这两组一维时间序列数据,并计算总样本量、训练样本数与测试样本数,为后续建模提供基础信息。
2. 输入-输出序列构建
为实现多步预测,系统采用滑动窗口策略将原始一维车速序列转换为监督学习所需的输入-输出对:
- 输入窗口长度:可配置(如 3、4、5、7、10 等),表示用于预测的历史车速点数。
- 输出窗口长度:通常与输入窗口长度一致,表示模型一次性预测的未来车速点数。
- 预测时域:例如,若输入为 t-3 到 t 的车速,则输出为 t+1 到 t+4 的车速(对应 4 步预测)。
该设计使得模型能够捕捉车速变化的动态模式,适用于短时域内的连续预测任务。
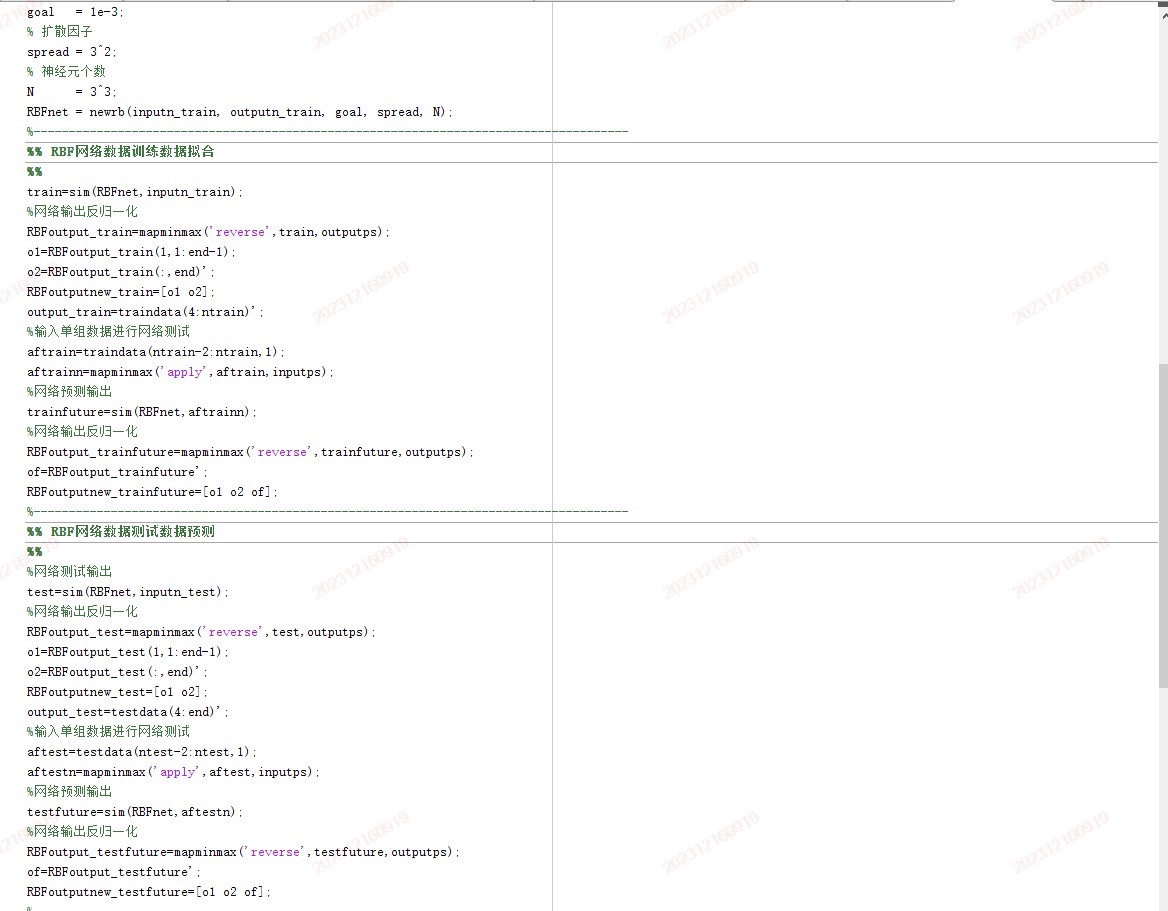
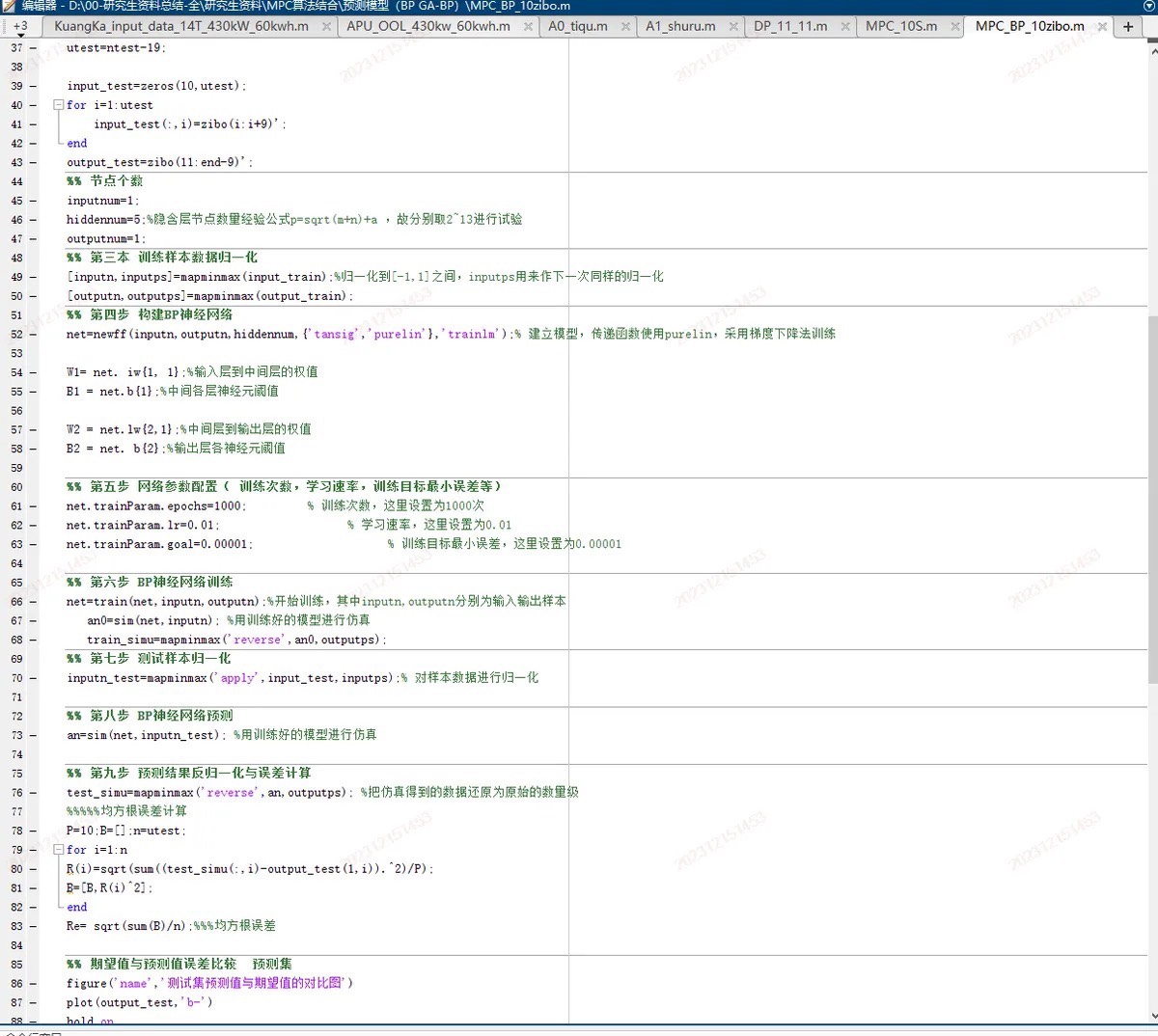
3. 数据归一化
为提升神经网络训练的稳定性与收敛速度,所有输入与输出数据均通过 mapminmax 函数进行线性归一化,将数据映射至 [−1, 1] 区间。测试阶段使用训练阶段获得的归一化参数(inputps, outputps)对新数据进行一致处理,确保数据分布一致性。
4. RBF 神经网络建模
系统采用 MATLAB 神经网络工具箱中的 newrb 函数构建 RBF 网络,其核心参数包括:
- 目标误差(
goal):设为1e-3,控制训练终止条件。 - 扩散系数(
spread):控制径向基函数的宽度,影响模型平滑性与泛化能力。 - 最大神经元数(
N):限制网络复杂度,防止过拟合。
RBF 网络具有训练速度快、结构简洁、对非线性映射能力强等优点,非常适合车速这类具有较强时间相关性的连续信号建模。
5. 模型训练与预测
- 训练阶段:使用归一化后的训练数据对 RBF 网络进行训练,直至满足误差目标或达到最大神经元数。
- 测试阶段:将测试集输入训练好的模型,获得归一化预测结果,并通过反归一化还原为实际车速值。
- 滚动预测支持:系统还支持使用最新观测值进行单步或多步滚动预测,模拟实际部署场景。
6. 性能评估
系统计算多项关键指标以量化模型性能:
- 平均绝对百分比误差(MAPE):衡量预测值相对于真实值的平均偏差比例,对异常值不敏感。
- 均方根误差(RMSE):反映预测误差的总体大小,对大误差更敏感。
- 相对误差序列:用于分析误差在时间维度上的分布特性。
此外,系统自动剔除相对误差绝对值大于 1 的异常点(通常由真实值接近零导致),确保评估结果的合理性。
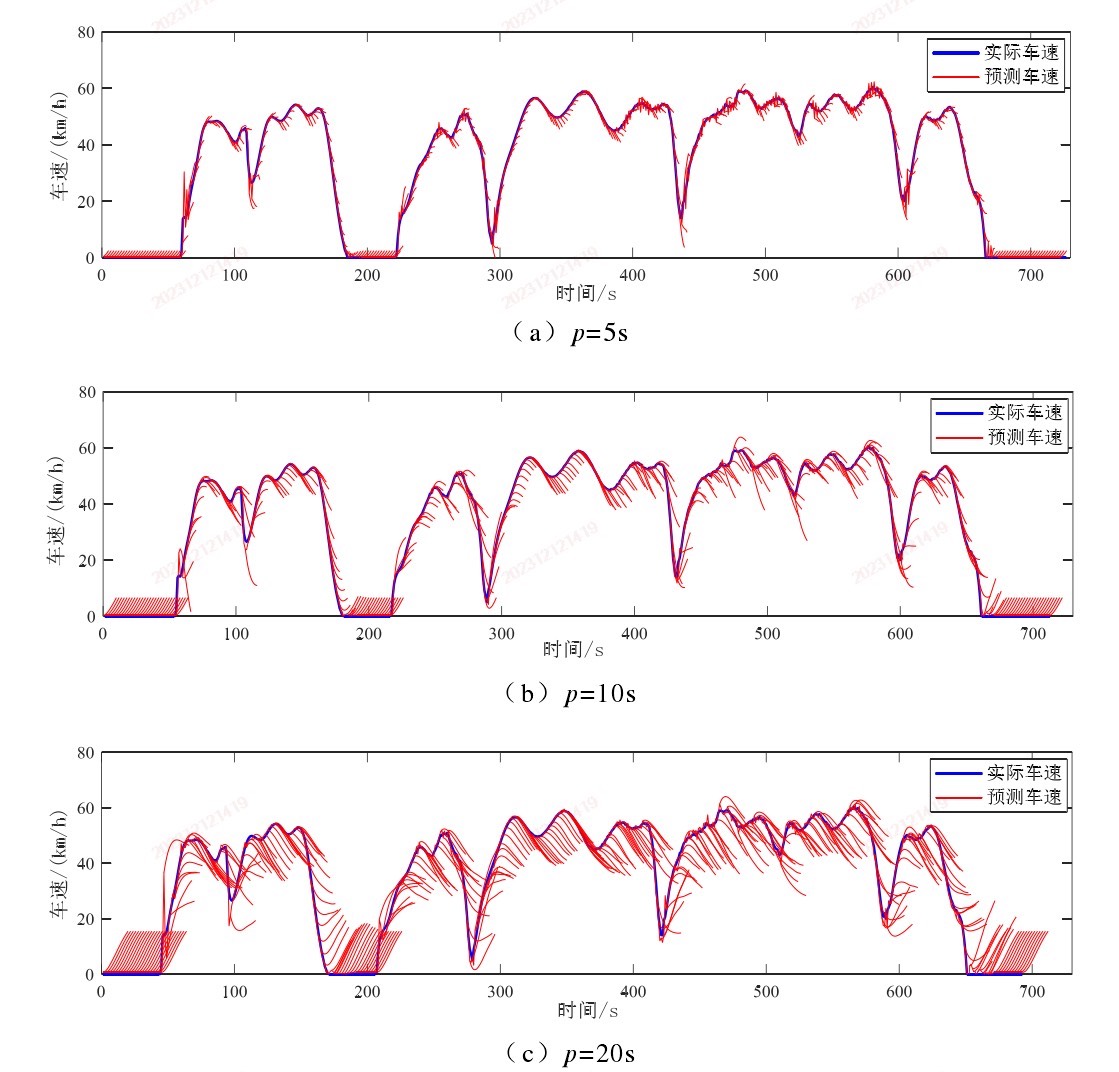
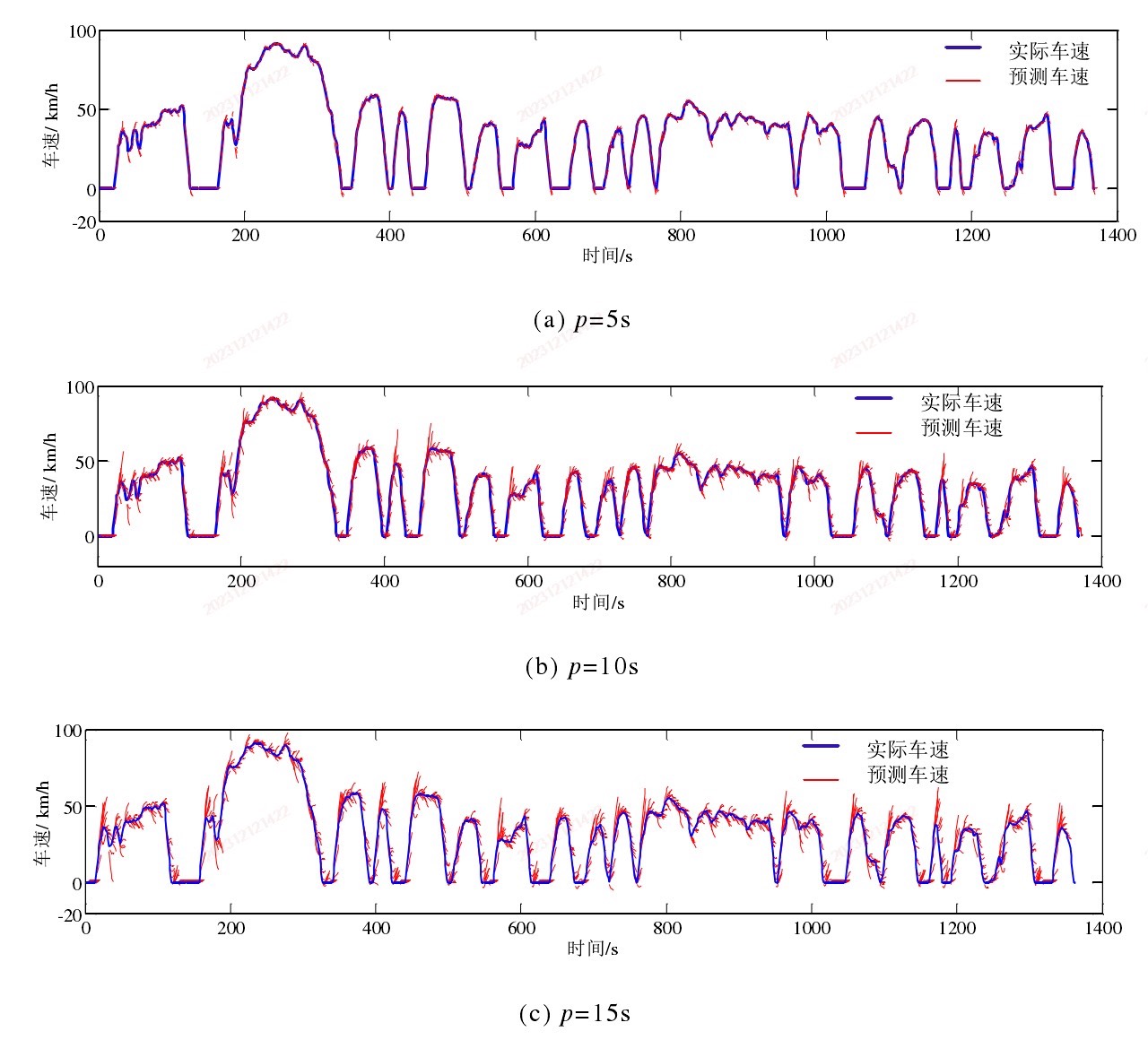
7. 可视化分析
系统提供多维度可视化功能,包括:
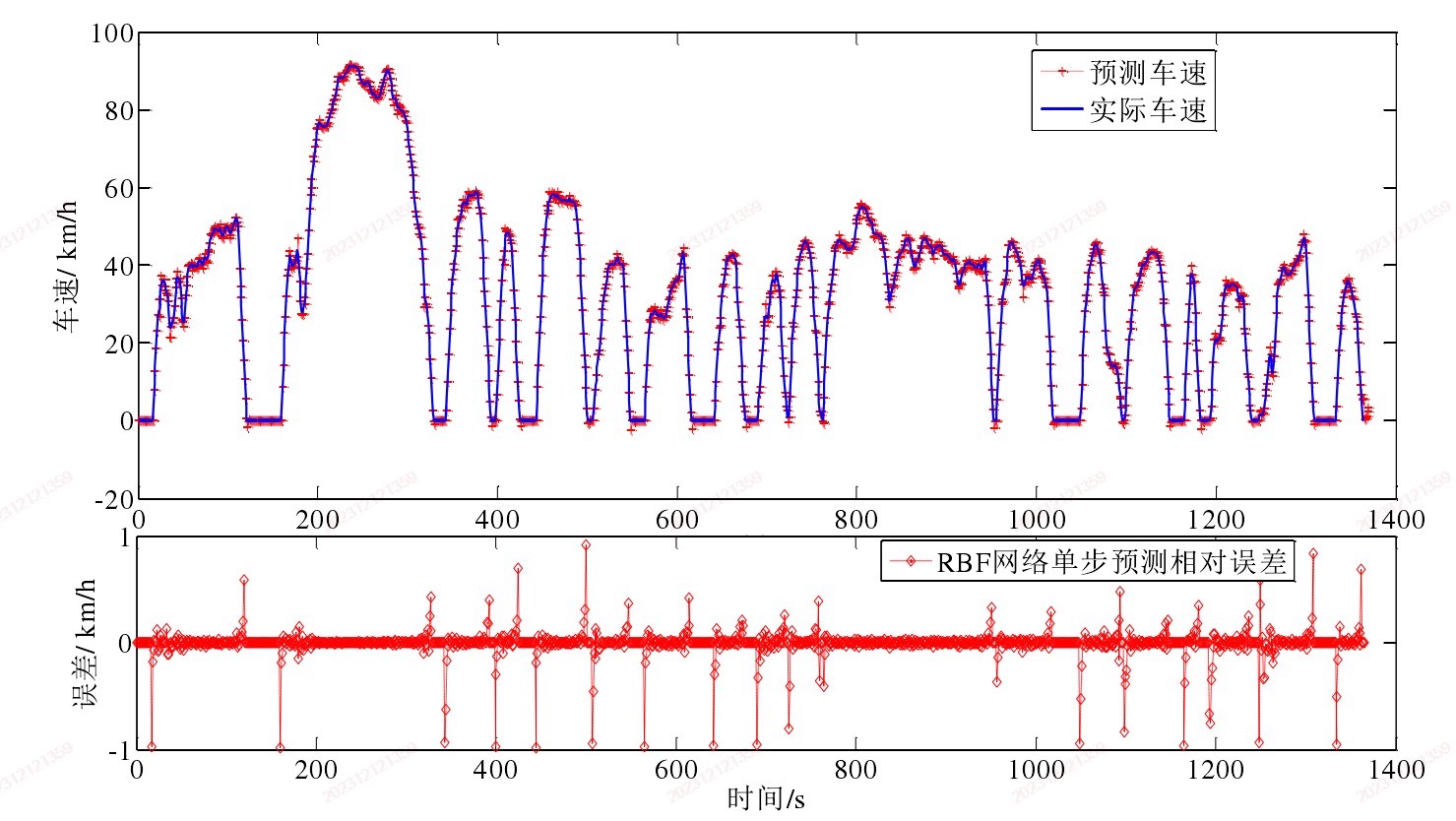
- 训练/测试结果对比图:展示预测曲线与真实车速曲线的拟合程度。
- 相对误差时序图:揭示模型在不同时间段的预测稳定性。
- 多步预测叠加图:通过将每个预测窗口的结果按时间对齐绘制,直观呈现模型对未来多步的预测能力。
这些图表有助于开发者快速诊断模型表现,指导参数调优或数据增强策略。
模型配置灵活性
系统通过多个脚本文件(如 Untitled4.m、rbftimetrcspeed.m、mainRBF.m 等)实现了不同预测窗口长度的配置:
| 脚本文件 | 输入长度 | 预测步长 | 适用场景 |
|---|---|---|---|
rbftime_trcsp.m |
3 | 3 | 超短时预测(<1秒) |
Untitled4.m |
4 | 4 | 短时预测 |
rbftime_trcspeed.m |
5 | 5 | 标准时域预测 |
Untitled6.m |
7 | 7 | 中等时域预测 |
main_RBF.m 等 |
10 | 10 | 较长时域预测(数秒级) |
用户可根据实际应用需求(如控制周期、计算资源、预测精度要求)选择合适的配置。
应用价值
该车速预测模型可直接集成至混合动力汽车的能量管理系统(EMS)中,用于:
- 预测性能量分配:提前预判车速变化,优化发动机与电机的功率分配。
- 再生制动策略优化:在减速前预知制动需求,最大化能量回收效率。
- 档位或模式预切换:结合预测车速,实现更平顺的驾驶模式切换。
通过引入预测信息,系统可从“反应式控制”升级为“预测式控制”,显著提升整车能效与驾驶体验。
总结
本系统提供了一套完整、可配置、高可用的基于 RBF 神经网络的车速时序预测解决方案。其设计兼顾工程实用性与学术严谨性,代码结构清晰,评估指标全面,可视化直观,适用于智能汽车、自动驾驶及先进能量管理等前沿领域的研究与开发。未来可进一步融合更多驾驶特征(如坡度、交通状态)或采用更先进的时序模型(如 LSTM、Transformer)以提升预测鲁棒性。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 2
2 0
0- 0



 已为社区贡献49条内容
已为社区贡献49条内容

所有评论(0)