【混合动力汽车能量管理策略】深度强化学习(DQN)代码+Simulink模型
【混合动力汽车能量管理策略】深度强化学习(DQN)代码+Simulink模型
[钉子]核心亮点:
[1]算法简介:基于深度强化学习(Double DQN),实现发动机-发电机组功率智能分配,油耗降低10%+,电池寿命优化!
[2]即插即用:提供完整MATLAB/Simulink代码框架,支持自定义驾驶循环,适配NEDC、WLTC等工况,一键运行!
[3]注释详细:能帮你快速理解代码结构和原理,在此技术上开始你的创新和研究。
[五角星] 包含内容:
[cool] DQN算法完整代码(状态空间/动作空间/奖励函数设计)
[cool] Simulink车辆模型(串并联混动架构,电池/发动机/电机)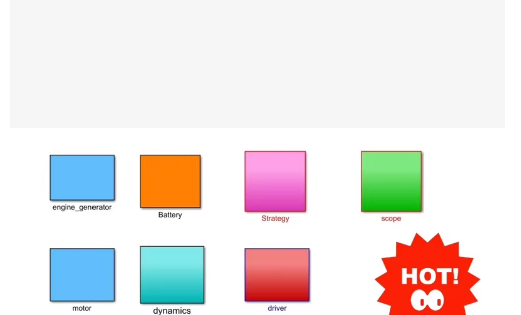
图中包含了混合动力系统的关键组件:
动力源:engine_generator(发动机/发电机)、Battery(电池)、motor(电机)。
控制与策略:Strategy(能量管理策略)、driver(驾驶员模型)。
物理模型:dynamics(车辆动力学)。
观测:scope(示波器/观测界面)。
MATLAB代码
Simulink模型,并按照图中的位置排列这些模块,同时为它们设置不同的颜色以匹配图片。
% 1. 创建新模型
modelName = 'Hybrid_Vehicle_System';
new_system(modelName);
open_system(modelName);
% 定义模块位置和大小 (格式: [左 下 右 上])
% 根据图片大致估算位置
pos_engine = [50, 350, 150, 450];
pos_battery = [200, 350, 300, 450];
pos_strategy = [350, 350, 450, 450];
pos_scope = [500, 350, 600, 450];
pos_motor = [50, 150, 150, 250];
pos_dynamics = [200, 150, 300, 250];
pos_driver = [350, 150, 450, 250];
% 2. 添加并配置模块 (使用Subsystem模拟图片中的方块)
% --- 第一行 ---
% Engine Generator (蓝色)
add_block('simulink/Ports & Subsystems/Subsystem', [modelName '/engine_generator'], 'Position', pos_engine);
set_block_color([modelName '/engine_generator'], [0.4, 0.7, 1.0]); % 浅蓝色
% Battery (橙色)
add_block('simulink/Ports & Subsystems/Subsystem', [modelName '/Battery'], 'Position', pos_battery);
set_block_color([modelName '/Battery'], [1.0, 0.5, 0.0]); % 橙色
% Strategy (粉色)
add_block('simulink/Ports & Subsystems/Subsystem', [modelName '/Strategy'], 'Position', pos_strategy);
set_block_color([modelName '/Strategy'], [1.0, 0.4, 0.8]); % 粉色
% Scope (绿色)
add_block('simulink/Sinks/Scope', [modelName '/scope'], 'Position', pos_scope);
set_block_color([modelName '/scope'], [0.4, 1.0, 0.4]); % 浅绿色
% --- 第二行 ---
% Motor (蓝色)
add_block('simulink/Ports & Subsystems/Subsystem', [modelName '/motor'], 'Position', pos_motor);
set_block_color([modelName '/motor'], [0.4, 0.7, 1.0]); % 浅蓝色
% Dynamics (青色)
add_block('simulink/Ports & Subsystems/Subsystem', [modelName '/dynamics'], 'Position', pos_dynamics);
set_block_color([modelName '/dynamics'], [0.0, 0.8, 0.8]); % 青色
% Driver (红色)
add_block('simulink/Ports & Subsystems/Subsystem', [modelName '/driver'], 'Position', pos_driver);
set_block_color([modelName '/driver'], [1.0, 0.4, 0.4]); % 浅红色
% 3. 整理布局
arrange_system(modelName);
save_system(modelName);
disp(['模型 ' modelName ' 创建完成!']);
end
% 辅助函数:设置模块背景颜色
function set_block_color(blockPath, rgbColor)
set_param(blockPath, ‘BackgroundColor’, rgbColor);
end
代码说明
new_system:创建一个名为Hybrid_Vehicle_System的新模型。
add_block:添加了7个子系统(Subsystem)和一个示波器(Scope),名称与图中完全一致。
set_block_color:这是一个自定义的辅助函数,利用BackgroundColor属性将模块染成图中对应的颜色(如电池是橙色,策略是粉色)。
布局:代码中使用了坐标向量(如[50, 350, 150, 450])来精确控制每个模块的位置,使其排列方式与截图一致。
MATLAB/Simulink 混合动力汽车仿真项目。
文件清单与功能解析
main.m (47 KB)
功能:这是整个项目的主程序入口。
内容推测:它通常包含初始化参数、加载车辆模型、定义强化学习环境、设置训练选项(如 PPO 或 DDPG 算法参数),并最终调用 train 函数开始训练或调用 sim 函数进行仿真。
HEV_RL.slx (8 KB)
功能:这是 Simulink 仿真模型文件。
内容推测:对应你之前发的图片中的模块布局(engine_generator, Battery, Strategy 等)。它包含了车辆的物理动力学模型和与 MATLAB 工作区交互的接口。
HEV_RL_env.mat (4 KB)
功能:这是 强化学习环境定义文件。
内容推测:保存了 rlSimulinkEnv 对象,定义了观测空间、动作空间以及奖励函数(Reward Function)。
HEV_RL_Actor.mat (1 KB) & HEV_RL_Critic.mat (1 KB)
功能:这是训练好的 神经网络权重文件。
内容推测:
Actor:策略网络,负责根据车辆状态输出控制动作(如发动机功率分配)。
Critic:价值网络,负责评估当前状态的好坏。
driver.m (1 KB)
功能:驾驶员模型脚本。
内容推测:生成标准工况(如 UDDS, CYC_UDDS)的速度需求信号。
HEV_RL_Agent.mat (1 KB)
功能:完整的 强化学习智能体对象。
内容推测:包含了 Actor、Critic 网络结构以及优化器设置,可以直接加载用于仿真测试。
MATLAB 运行命令
cd ‘D:OneDrive桌面基于深度强化学习的混合动力汽车能量管理策略’
% 2. 运行主程序
main
运行此代码需要安装 MATLAB 以及 Reinforcement Learning Toolbox 和 Simulink 工具箱。
(DQN算法)的混合动力汽车能量管理系统的设置脚本。
代码的主要功能是初始化 DQN 智能体的超参数,并定义 Simulink 环境与 MATLAB 工作区之间的接口(即观测值和动作的定义)。
完整 MATLAB 代码:
MATLAB DQN 系统配置代码
% 初始化环境参数
clear; clc;
% 1. DQN 超参数设置 (对应图片右侧代码区域)
alpha = 1e-3; % 学习率 (Learning Rate)
gamma = 0.99; % 折扣因子 (Discount Factor)
epsilon = 0.9; % 贪婪策略系数 (Epsilon-greedy)
alpha_decay = 1e-5; % 学习率衰减因子
epsilon_decay = 2000; % 衰减步数
num_episodes = 2000; % 训练回合数
% 2. 创建 Simulink 环境接口
% 注意:这里使用了旧版函数 rlSimulinkEnv (适用于 R2020a 及更早版本)
% 如果是新版本 MATLAB,建议使用 rlEnvironment
mdl = ‘HEV_RL’; % Simulink 模型名称 (需与 .slx 文件名一致)
env_system = mdl; % 赋值给环境系统变量
agentID = ‘DQN’; % 智能体 ID 标识
% 3. 定义观测空间 (Observations)
% 图片中定义了三个观测值:[2 1] 表示向量,包含下限和上限
% 观测1: 电池SOC
observationInfo1 = rlNumericSpec([2 1], …
‘LowerLimit’, [-80, 1], … % 下限: 假设电流-80, SOC 1%
‘UpperLimit’, [80, 100]); % 上限: 假设电流80, SOC 100%
observationInfo1.Name = ‘SOC’;
observationInfo1.Description = ‘Current, SOC’;
% 4. 定义动作空间 (Actions)
% 图片底部定义了动作
P_engine = [0:10:80]; % 发动机功率动作集合 (0, 10, 20… 80kW)
actionInfo = rlFiniteSetSpec(P_engine);
actionInfo.Name = ‘P_engine_power’;
rlNumericSpec:这是定义观测空间的关键函数。代码中 [2 1] 表示观测值是一个 2 维向量,通常对应混合动力车控制中的电池电流和荷电状态(SOC)。
rlFiniteSetSpec:这是定义离散动作空间的关键函数。[0:10:80] 表示发动机只能在特定的功率点工作(0kW 到 80kW,步长为 10kW),这符合 DQN 算法处理离散动作的特性。
alpha, gamma, epsilon:这些是 DQN 算法的核心超参数。gamma (0.99) 表示对未来奖励的重视程度;epsilon (0.9) 表示探索率,即智能体有多大概率会随机尝试新动作而不是利用已知经验。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献91条内容
已为社区贡献91条内容

所有评论(0)