手把手玩转HyperMesh+LS-DYNA碰撞仿真
本教程教学hypermesh与LS-DYNA汽车碰撞仿真CAE分析,包括A和B两部分,其中A主要讲解汽车有限元模型的创建和构件之间的连接关系处理等,且包括碰撞的一些设置;B部分则详细讲解了汽车正碰、侧碰、车架撞击刚性壁障等设置与分析,并包含了所有的计算K文件模型和材料属性设置。 通过本教程的学习,将完全掌握汽车碰撞相关的知识与操作,可以直接上手实际工程项目。
刚入行做汽车碰撞分析那会儿,最头疼的就是模型连接关系的处理——焊点该用哪种算法?胶粘参数怎么设?后来发现搞明白这几个关键点,整车模型搭建效率直接翻倍。今天咱们就从实战角度聊聊这事儿,附上真实项目里用得到的代码片段。
Part A:从零件到整车模型
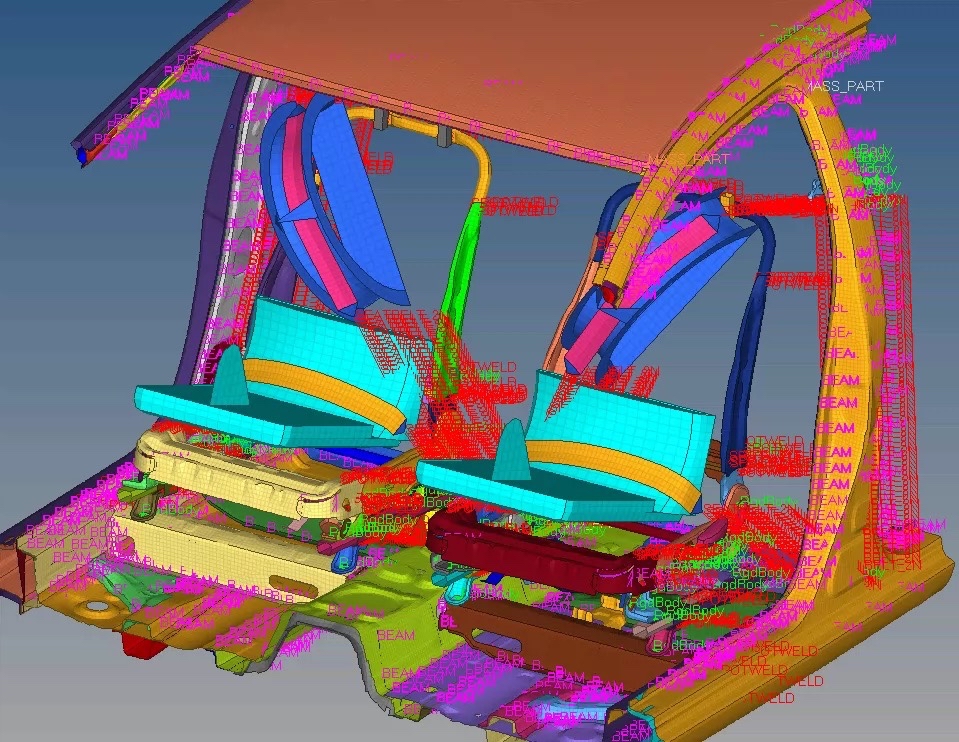
在HyperMesh里搭整车模型就像玩乐高,但每个零件的连接方式直接影响碰撞结果。比如焊点建模,用*CM实体单元还是ACM算法?建议新手先用TCL脚本批量生成焊点,比GUI操作快十倍:
# 批量创建焊点示例
set surf1 [hm_getsurfaces "component_1" 1]
set surf2 [hm_getsurfaces "component_2" 1]
hm_createmark connectors 1 "by config"
hm_createconnectoracm 1 1 5 2 $surf1 $surf2 这段脚本里的关键参数是第五个参数"5",代表焊核直径5mm。实际项目中常遇到钣金件厚度变化,记得用if语句判断厚度自动调整焊点参数。
材料卡片的坑也不少,特别是各向异性材料。这里有个MAT24的典型设置:
$MATERIAL
MID 24
RO 7.85E-9
E 210.E3
PR 0.3
SIGY 350.0注意单位制!这里用的是ton-mm-s单位,要是用错成kg-m-s,结果直接崩盘。当年有个同事把密度写成7.85,结果模型质量大了1000倍...
本教程教学hypermesh与LS-DYNA汽车碰撞仿真CAE分析,包括A和B两部分,其中A主要讲解汽车有限元模型的创建和构件之间的连接关系处理等,且包括碰撞的一些设置;B部分则详细讲解了汽车正碰、侧碰、车架撞击刚性壁障等设置与分析,并包含了所有的计算K文件模型和材料属性设置。 通过本教程的学习,将完全掌握汽车碰撞相关的知识与操作,可以直接上手实际工程项目。
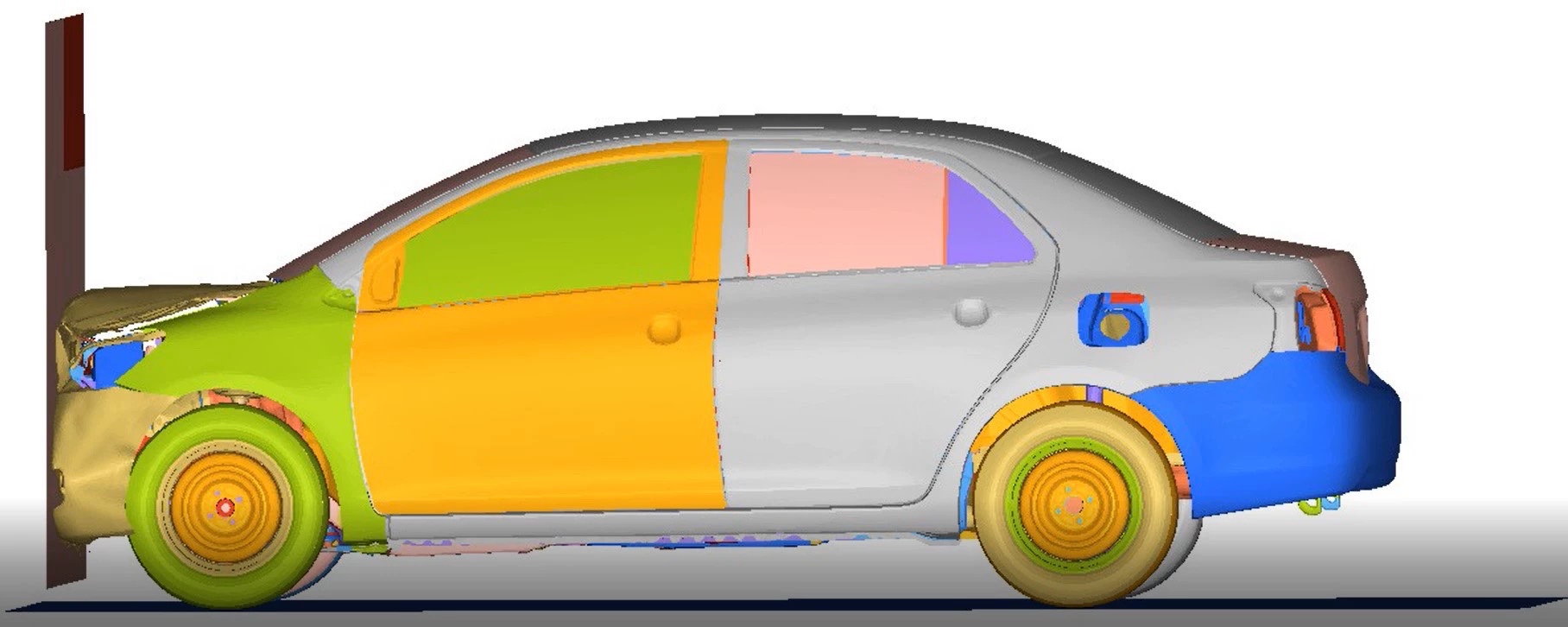
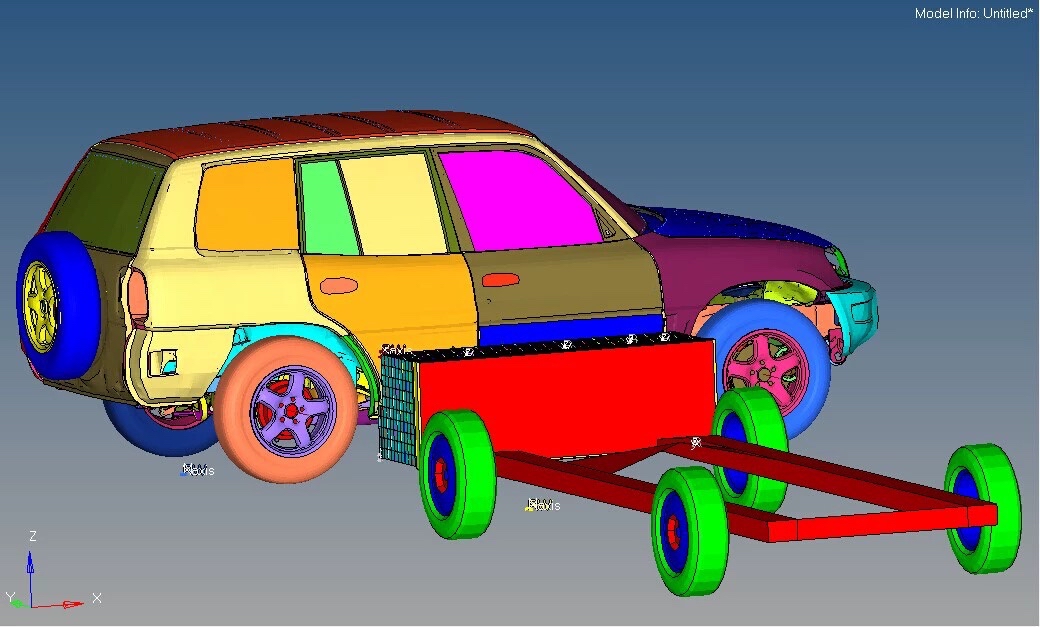
Part B:碰撞工况实战
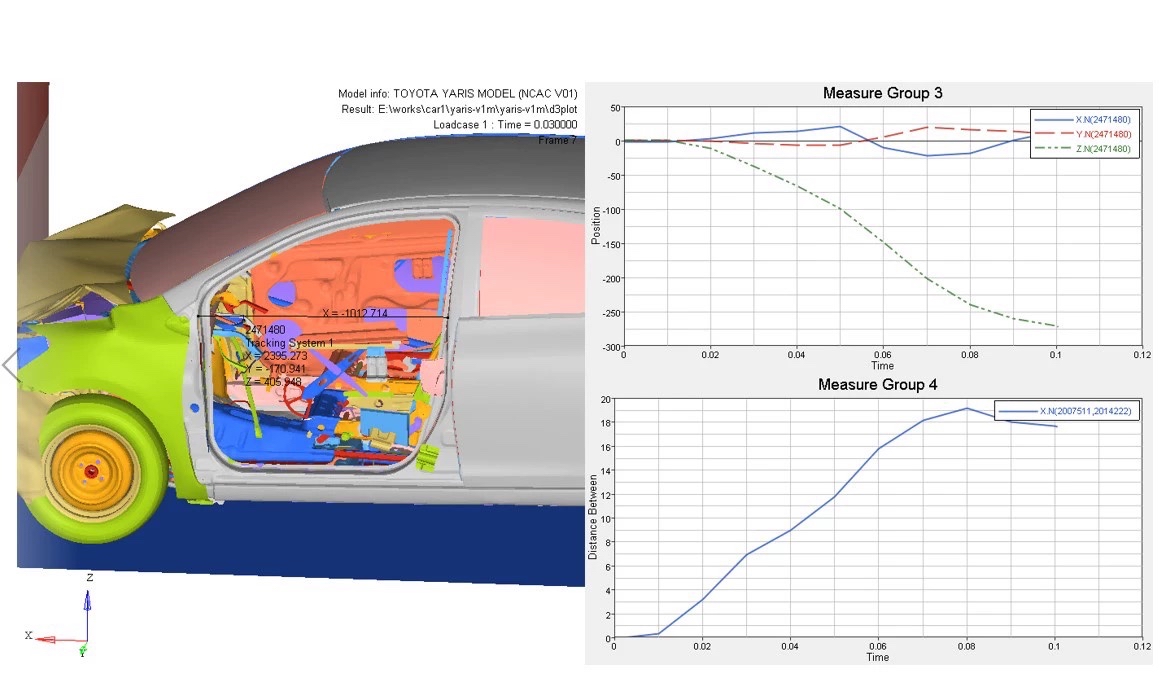
正碰工况设置里,壁障建模容易翻车。推荐用*RIGIDWALLGEOMETRICFLAT_MOTION定义移动壁障:
*RIGIDWALL_GEOMETRIC_FLAT_MOTION
$# nsid boxid birth death
1 0 0.0 100.0
$# vx vy vz
15000.0 0.0 0.0这个15000mm/s的初速度对应国标50km/h碰撞(注意单位换算:50km/h≈13888mm/s,实际项目要按法规调整)。有个冷知识:壁障摩擦系数设0.12时仿真结果最接近实测数据。
侧碰分析更考验接触设置,尤其是车门防撞梁与假人模型的接触。用*CONTACTAUTOMATICSURFACETOSURFACE时加个软约束:
$# soft sofscl lcidab maxpar sbopt depth
2 0.1 0 0.0 0.0 2.0这个soft=2选项能有效解决穿透问题,但计算时间会增加15%左右。记得在K文件里搜索所有接触对,检查是否有重复定义——这错误我犯过三次,每次debug都要通宵。
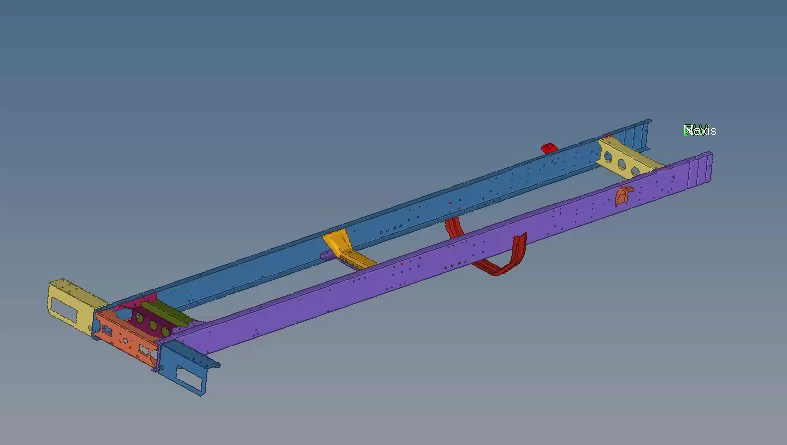
避坑指南
- 车架撞击工况中,建议把焊点失效准则的
FAIL值设为实际焊点直径的1.2倍,比如直径5mm焊点设6mm失效阈值 - 遇到能量异常增长,先用
grep "hour" d3hsp命令在结果文件里找沙漏能占比 - 整车模型跑不动?试试把安全带织带的单元类型从ELEMENTSEATBELAT换成ELEMENTBEAM
模型文件我习惯按这个结构组织:
Project/
├── 00_Geometry
├── 10_Meshing
├── 20_Connections
│ └── weld_config.tcl # 焊点参数配置文件
└── 30_Simulation
└── frontal_impact.k # 完整K文件模板每个子模块都有对应的验证脚本,比如用Python写个自动检查材料卡片的工具:
def check_material(mat_dict):
if mat_dict['MID'] == 24 and mat_dict['E'] < 2e5:
print(f"警告!MAT{mat_dict['MID']}弹性模量异常")最后说个血泪教训:某次项目因为安全带预紧器没设LOADNODEPOINT动力松弛,假人位移偏差30%。所以啊,别小看任何一个加载细节,碰撞仿真就是个"细节魔鬼"聚集地。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 4
4 0
0- 0



 已为社区贡献49条内容
已为社区贡献49条内容

所有评论(0)