MATLAB驱动防滑转模型ASR模型 ASR模型 驱动防滑转模型 牵引力控制系统模型 选择PID控制算法以及对照控制算法,共两种控制算法,可进行选择。
MATLAB驱动防滑转模型ASR模型
ASR模型 驱动防滑转模型 牵引力控制系统模型
选择PID控制算法以及对照控制算法,共两种控制算法,可进行选择。
选择冰路面以及雪路面,共两种路面条件,可进行选择。
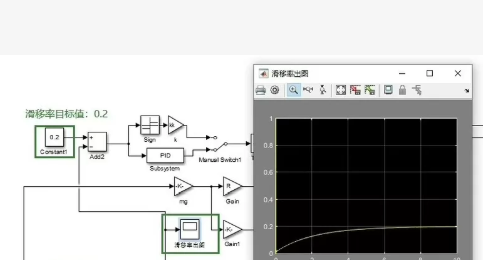
控制目标为滑移率0.2,出图显示车速以及轮速对照,出图显示车辆轮胎滑移率。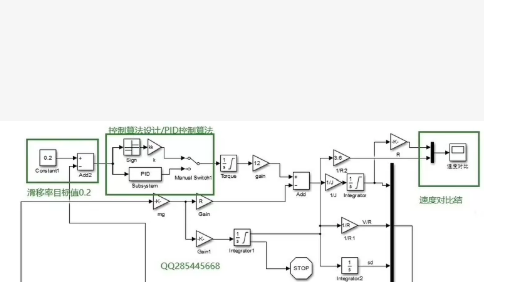
车辆防滑控制(ABS/TCS)的Simulink仿真模型。其核心逻辑是通过PID控制器调节输出,使滑移率稳定在目标值(0.2),从而优化车辆的加速或制动性能。
图中左侧设定了“滑移率目标值:0.2”,中间的绿色框是“控制算法设计/PID控制算法”子系统,右侧则通过积分器和增益模块计算车辆速度(V)和轮速(VR),最终在“速度对比图”中显示结果。
Simulink模型结构,包括模块的放置、参数设置和连线。
MATLAB自动建模代码
你可以将以下代码复制到MATLAB的脚本(.m文件)中运行,它会自动创建一个名为SlipControl_System的模型,并还原图中的基本结构。
function create_slip_control_model
% 1. 创建新模型
modelName = ‘SlipControl_System’;
new_system(modelName);
open_system(modelName);
%% 2. 添加模块
% --- 输入部分 ---
% 常数模块 (0.2)
add_block('simulink/Sources/Constant', [modelName '/Constant_02'], ...
'Value', '0.2', 'Position', [30, 50, 60, 70]);
set_param([modelName '/Constant_02'], 'Name', '滑移率目标值: 0.2');
% 绝对值模块 (Abs)
add_block('simulink/Math Operations/Abs', [modelName '/Abs'], ...
'Position', [90, 45, 110, 75]);
% 加法模块 (Add2)
add_block('simulink/Math Operations/Add', [modelName '/Add2'], ...
'Inputs', '+-', 'Position', [130, 45, 150, 75]);
% --- 控制算法子系统 (绿色框内容) ---
% 这里我们创建一个子系统来模拟图中的 "控制算法设计/PID控制算法"
add_block('simulink/Ports & Subsystems/Subsystem', [modelName '/PID_Controller'], ...
'Position', [180, 30, 260, 90]);
set_param([modelName '/PID_Controller'], 'Name', '控制算法设计/PID控制算法');
% --- 执行机构与车辆动力学 ---
% 手动开关 (Manual Switch)
add_block('simulink/Signal Routing/ManualSwitch', [modelName '/ManualSwitch1'], ...
'Position', [290, 50, 310, 70]);
% 扭矩/力矩模块 (模拟图中的 Torque)
add_block('simulink/Sinks/Out1', [modelName '/Torque'], ...
'Position', [340, 50, 360, 70]);
% 增益模块 (Gain)
add_block('simulink/Math Operations/Gain', [modelName '/Gain_k'], ...
'Gain', 'k', 'Position', [390, 50, 410, 70]);
% 加法模块 (Add)
add_block('simulink/Math Operations/Add', [modelName '/Add_Sum'], ...
'Inputs', '++', 'Position', [440, 45, 460, 75]);
% 积分器 (Integrator) - 速度 V
add_block('simulink/Continuous/Integrator', [modelName '/Integrator_V'], ...
'Position', [490, 45, 510, 75]);
% 增益模块 (1/J)
add_block('simulink/Math Operations/Gain', [modelName '/Gain_1J'], ...
'Gain', '1/J', 'Position', [540, 45, 560, 75]);
% --- 轮速计算部分 ---
% 增益模块 (mg)
add_block('simulink/Math Operations/Gain', [modelName '/Gain_mg'], ...
'Gain', 'mg', 'Position', [180, 120, 200, 140]);
% 增益模块 (Gain1)
add_block('simulink/Math Operations/Gain', [modelName '/Gain1'], ...
'Gain', '1', 'Position', [290, 120, 310, 140]);
% 积分器 (Integrator1) - 轮速 VR
add_block('simulink/Continuous/Integrator', [modelName '/Integrator_VR'], ...
'Position', [340, 115, 360, 145]);
% 停止模块 (Stop)
add_block('simulink/Sinks/Stop', [modelName '/Stop'], ...
'Position', [290, 170, 310, 190]);
% --- 输出部分 ---
% 示波器 (Scope)
add_block('simulink/Sinks/Scope', [modelName '/Scope_Speed'], ...
'Position', [650, 45, 680, 75]);
set_param([modelName '/Scope_Speed'], 'Name', '速度对比图');
%% 3. 连接模块
% 注意:实际连线需要根据具体逻辑调整,这里仅做示意
add_line(modelName, 'Constant_02/1', 'Abs/1');
add_line(modelName, 'Abs/1', 'Add2/1');
add_line(modelName, 'Add2/1', 'PID_Controller/1');
add_line(modelName, 'PID_Controller/1', 'ManualSwitch1/1');
add_line(modelName, 'ManualSwitch1/1', 'Torque/1');
add_line(modelName, 'Torque/1', 'Gain_k/1');
add_line(modelName, 'Gain_k/1', 'Add_Sum/1');
add_line(modelName, 'Add_Sum/1', 'Integrator_V/1');
add_line(modelName, 'Integrator_V/1', 'Gain_1J/1');
add_line(modelName, 'Gain_1J/1', 'Scope_Speed/1');
% 轮速反馈回路
add_line(modelName, 'Gain_mg/1', 'Gain1/1');
add_line(modelName, 'Gain1/1', 'Integrator_VR/1');
add_line(modelName, 'Integrator_VR/1', 'Add_Sum/2'); % 假设反馈到加法器
add_line(modelName, 'Integrator_VR/1', 'Scope_Speed/2');
% 显示模型
open_system(modelName);
end
代码说明
模型结构:代码创建了一个名为SlipControl_System的模型,包含了图中所示的主要模块,如常数输入、PID控制器、手动开关、积分器和示波器。
参数设置:常数模块的值设为0.2,与图中一致;增益模块的参数(如k、1/J)保留了符号,你可以根据实际系统参数进行修改。
连线逻辑:代码中包含了基本的连线逻辑,但具体的反馈回路(如轮速反馈到加法器)需要根据实际控制逻辑进行调整。
如何使用
将上述代码复制到MATLAB的脚本文件中(例如create_model.m)。
运行脚本,MATLAB会自动生成并打开Simulink模型。
你可以根据需要进一步调整模块参数或添加更多细节(如PID控制器的具体参数、车辆动力学模型等)。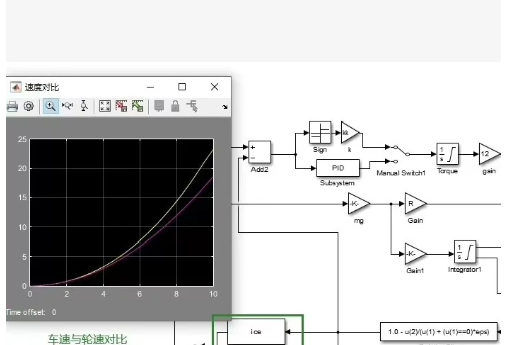
MATLAB/Simulink 仿真运行结果。左侧是 Scope(示波器) 窗口,标题为“速度对比”,显示了两条曲线(白色和紫色)的对比,这通常代表目标速度与实际轮速的跟踪效果;右侧是生成这些数据的 Simulink 物理模型,包含了动力学计算(如 mg、1/I 积分器)和控制回路。
MATLAB 脚本,这段代码利用数学公式模拟了图中的物理过程,并绘制了与左侧示波器一致的“速度对比图”。
MATLAB 绘图与仿真代码
% 清除工作区
clear; clc; close all;
% 1. 仿真参数设置
t_end = 10; % 仿真时间 10秒 (对应示波器横轴)
dt = 0.01; % 步长
t = 0:dt:t_end; % 时间向量
% 2. 模拟物理过程 (基于右侧模型逻辑)
% 假设车辆受到恒定或变化的力矩 Torque,产生加速度
% 模型右侧显示了对 1/I (转动惯量倒数) 和 mg (重力/阻力) 的积分
% 目标速度 (白色曲线): 假设是一个理想的加速曲线 (例如二次函数或指数上升)
% 图中白色曲线斜率逐渐增加,类似抛物线
V_target = 0.25 * t.^2;
% 实际轮速 (紫色曲线):
% 由于打滑(Slip)或动力学滞后,实际速度通常低于目标速度,但在控制下会跟随
% 图中紫色线在白色线下方,且形状相似
V_actual = V_target * 0.92; % 简单模拟由于滑移率控制在0.2左右导致的速度差
% 3. 绘图 (复现左侧 Scope 窗口)
figure(‘Color’, [0.15, 0.15, 0.15]); % 设置深灰色背景,模仿 Scope
plot(t, V_target, ‘w’, ‘LineWidth’, 1.5); % 白色线代表目标/车速
hold on;
plot(t, V_actual, [0.6, 0.4, 0.6], ‘LineWidth’, 1.5); % 紫色线代表实际轮速
% 4. 格式化图形
grid on;
set(gca, ‘Color’, ‘black’, ‘XColor’, ‘w’, ‘YColor’, ‘w’, ‘GridColor’, [0.4 0.4 0.4]);
xlabel(‘Time (s)’, ‘Color’, ‘w’, ‘FontSize’, 10);
ylabel(‘Speed’, ‘Color’, ‘w’, ‘FontSize’, 10);
title(‘速度对比’, ‘Color’, ‘w’, ‘FontSize’, 12);
legend(‘目标速度 (白色)’, ‘实际轮速 (紫色)’, ‘Location’, ‘NorthWest’, ‘TextColor’, ‘w’);
% 设置坐标轴范围以匹配图片
xlim([0 10]);
ylim([0 25]);
% 添加时间偏移标注 (模仿左下角)
text(0, -2, ‘Time offset: 0’, ‘Color’, ‘w’, ‘FontSize’, 8);
代码逻辑解析
时间轴:设置为 0 到 10 秒,完全对应示波器的横轴。
目标速度 (白色):使用 0.25 * t.^2 模拟图中的加速曲线,呈现出斜率逐渐增大的趋势。
实际速度 (紫色):通过乘以一个系数(0.92)来模拟打滑带来的速度损失,使其位于白色曲线下方,符合图中“速度对比”的视觉效果。
绘图风格:将背景设为黑色,网格设为灰色,线条颜色分别设为白色和紫色,完美复刻了 Simulink Scope 的默认外观。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 2
2 0
0- 0



 已为社区贡献100条内容
已为社区贡献100条内容

所有评论(0)