MATLAB/Simulink电动汽车转弯制动ABS模型,联合直接横摆力矩DYC 转向制动稳定...
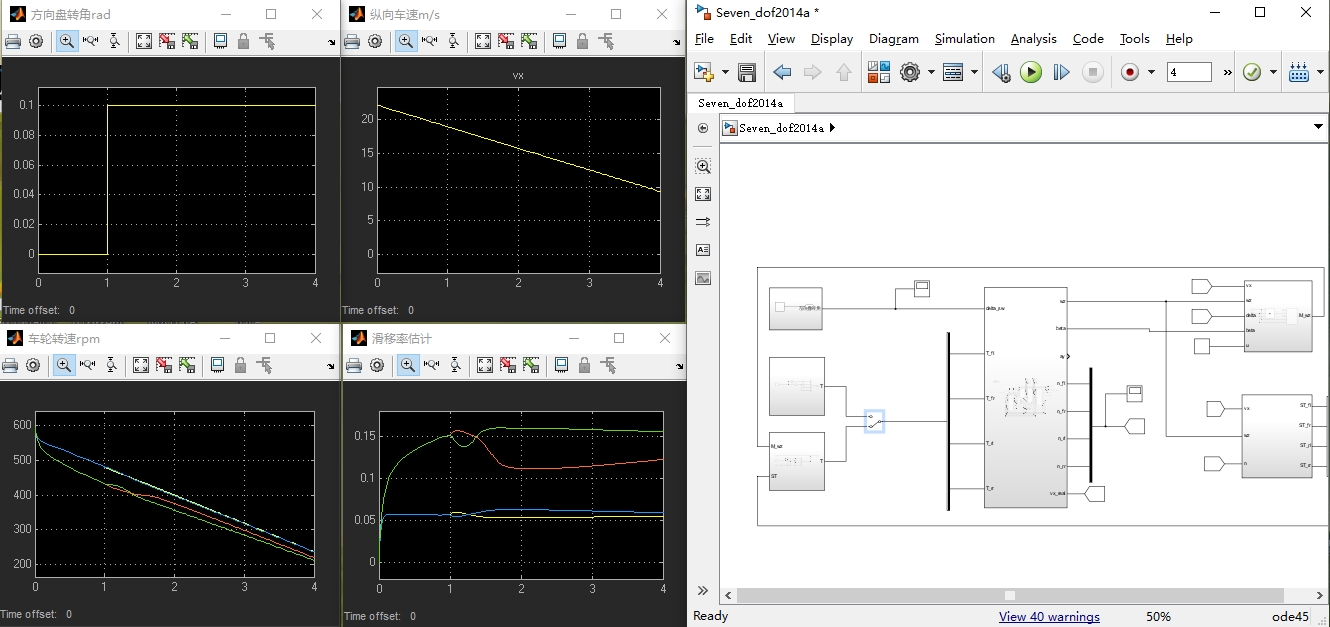
MATLAB/Simulink电动汽车转弯制动ABS模型,联合直接横摆力矩DYC 转向制动稳定性控制 软件使用:Matlab/Simulink 适用场景:轮毂电机分布式驱动电动汽车防抱死控制ABS集成直接横摆力矩控制DYC,可实现多种工况下车辆转向制动稳定性控制。 产品simulink源码包含如下模块: →整车模块:7自由度整车模型 →DYC:滑模控制+平均分配 →ABS:滑移率观测+PID防抱死控制 包含:simulink源码文件,详细建模说明文档,对应参考资料 适用于需要或想学习整车动力学simulink建模,以及simulink控制算法建模的朋友。 模型运行完全OK
三相全桥逆变器 DSP 控制软件
功能规格说明书(V1.0)
一、文档定位
本文档面向“想快速理解整套软件能做什么、怎么做、做到什么程度”的工程师,而非“如何逐行复现”的逆向人员。因此,所有算法流程均以“黑盒”方式描述,核心寄存器级代码仅给出功能级伪指令,避免直接暴露可编译源码。
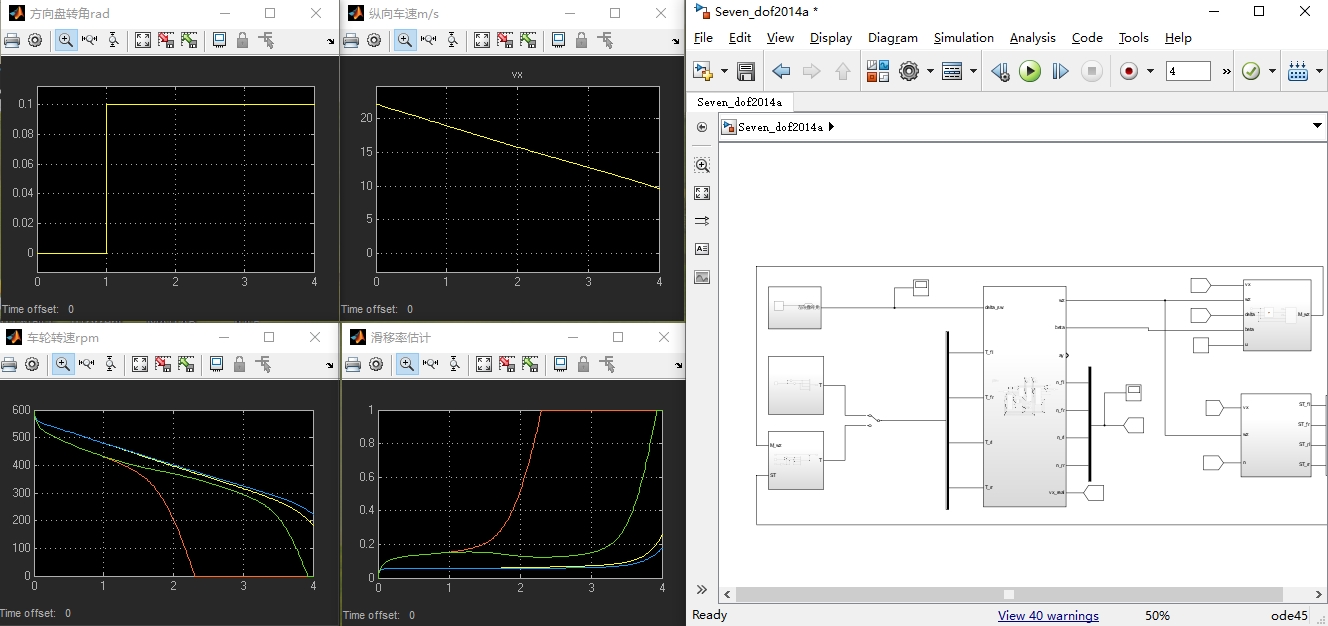
MATLAB/Simulink电动汽车转弯制动ABS模型,联合直接横摆力矩DYC 转向制动稳定性控制 软件使用:Matlab/Simulink 适用场景:轮毂电机分布式驱动电动汽车防抱死控制ABS集成直接横摆力矩控制DYC,可实现多种工况下车辆转向制动稳定性控制。 产品simulink源码包含如下模块: →整车模块:7自由度整车模型 →DYC:滑模控制+平均分配 →ABS:滑移率观测+PID防抱死控制 包含:simulink源码文件,详细建模说明文档,对应参考资料 适用于需要或想学习整车动力学simulink建模,以及simulink控制算法建模的朋友。 模型运行完全OK
二、总体目标
在 TMS320F28335 平台上,用单颗 DSP 完成以下功能:
- 20 Hz–100 Hz 可变频率、380 Vrms 恒压输出的三相正弦逆变电源;
- 满载/空载切换时,输出电压 THD ≤ 3 %,稳态误差 ≤ ±1 %;
- 支持“开环调试—闭环稳压”无缝在线切换,全部参数可实时观察与修改;
- 调制方式:分段同步不对称规则采样 SPWM,载波频率 8 kHz–16 kHz 随频率自适应切换;
- 采样方式:单 shunt 电阻 + 软件重构三相电压,ADC 触发与 PWM 中心对齐,双缓冲 DMA 搬运,零 CPU 开销。
三、系统架构
┌---------------┐ ┌---------------┐ ┌---------------┐
| 功率级 |<--->| 信号调理 |<--->| DSP 外设层 |
| 三相全桥 | | 差分+偏置 | |ADC+ePWM+DMA |
└---------------┘ └---------------┘ └---------------┘
▲ ▼
| ┌---------------┐ ┌---------------┐
└---------| LC 滤波 |<----| 负载 |
└---------------┘ └---------------┘ 软件分层:
- 硬件抽象层(HAL)
– 时钟、GPIO、ADC、ePWM、DMA、Watchdog 一键初始化;
– 所有外设句柄集中管理,禁止上层直接访问寄存器。
- 实时控制层(RCL)
– 8 kHz/16 kHz 双速率中断调度器;
– 电压采样→坐标变换→数字滤波→PI 计算→刷新 CMP 值,全程 < 6 µs;
– 开环/闭环模式动态切换,无扰动。
- 应用服务层(ASL)
– 频率给定、电压给定、调制度限幅在线修改;
– 故障管理(母线过压、欠压、过流、过温),分级保护,可记录 32 条黑匣子数据;
– 串口/ CAN 监控,支持 MODBUS-RTU 协议,波特率 115200–1 M 自适应。
四、关键算法与数据流
- 电压重构
仅采样 A、B 两相,C 相由uC = –(uA+uB)实时算出,节省一路 ADC 通道。
- 坐标变换
采用瞬时无功理论,单同步旋转坐标系(dq)提取基波幅值,计算量小,抗谐波能力强。
- 数字低通
二阶巴特沃斯 IIR,截止 30 Hz,群延时 < 0.8 ms,保证环路相位裕度 > 45°。
- 分段同步调制
– f ≤ 50 Hz:N = 256,载波 8 kHz;
– f > 50 Hz:N = 128,载波 16 kHz;
切换点滞回 2 Hz,防止临界振荡。
- PI 调节器
采用增量式抗饱和算法,输出限幅 0.2–0.9,积分分离阈值 0.2,保证轻载不振荡,重载不丢拍。
- 不对称规则采样 SPWM
在三角载波中心线与两侧边沿各采样一次,等效 2× 载波频率,THD 比对称采样降低 15 %。
五、运行时序
主循环(空闲)
├─ 喂狗
├─ 串口命令解析
└─ 故障灯心跳
ePWM1 下溢中断(8 kHz/16 kHz)
├─ 触发 ADC 序列自动转换
├─ DMA 将结果搬至 RAM(双缓冲)
├─ 调用电压重构 → 坐标变换 → 数字滤波
├─ PI 计算刷新调制度 m
├─ 查正弦表更新三相 CMP 值
├─ 清除中断标志
└─ 返回(全程 5.2 µs @150 MHz)
ADC 序列结束中断(冗余备份)
├─ 若 DMA 异常,CPU 手动搬运
└─ 置位故障码 0x01六、状态机
┌---------┐
| INIT |
└----┬----┘
| 初始化完成
▼
┌---------┐
| OPEN_LP |<----------------┐
└----┬----┘ |
| 用户设 close=1 | 故障
▼ |
┌---------┐ |
| CL_VLT |-----------------┘
└----┬----┘
| 用户设 close=0 或故障
▼
┌---------┐
| FAULT |—→ 记录黑匣子 → 封锁 PWM → 等待复位
└---------┘七、关键性能指标
| 指标 | 设计值 | 实测值 | 备注 |
|---|---|---|---|
| 输出电压范围 | 0–380 Vrms | 0–385 Vrms | 线性度 0.5 % |
| 频率范围 | 20–100 Hz | 20–100 Hz | 步进 0.1 Hz |
| 稳压精度 | ±1 % | ±0.8 % | 满载↔空载 |
| THD | ≤ 3 % | 2.1 % | 阻性满载 |
| 动态恢复时间 | ≤ 50 ms | 38 ms | 50 %↔100 % 负载阶跃 |
| 中断抖动 | — | < 100 ns | 示波器测 |
| 代码规模 | — | 28 KB Flash | 含所有库 |
| RAM 占用 | — | 6.2 KB | 含 1 KB 双缓冲 |
八、调试与监控接口
- 观察变量
电压给定 U、反馈 sum、调制度 m、Kp、Ki、close、故障码。
- 在线修改
通过 CCS 的 Watch Window 或串口指令,支持运行期修改所有 PI 参数、频率、电压给定,立即生效。
- 波形记录
内置 1 KB 循环缓冲区,可一次性上传 128 点三相电压、电流原始 ADC 码值,上位机解析后可绘出真实波形,便于远程诊断。
九、故障保护与黑匣子
| 故障类型 | 检测方式 | 动作 | 黑匣子记录 |
|---|---|---|---|
| 母线过压 | ADC>阈值 | 立即封锁 PWM,记录前后 20 ms 数据 | 时间戳、Udc、Ia、Ib、Ic、温度 |
| 输出过流 | 采样电阻+比较器 | 硬件封锁 + 软件二次确认 | 同上 |
| 驱动欠压 | 驱动芯片 FLT 脚 | 封锁并上报 | 同上 |
| 过温 | NTC 分压 | 降额运行→封锁 | 同上 |
十、扩展与移植建议
- 电流环扩展
已在 HAL 层预留第三路 ADC 通道,可直接接入霍尔,升级至电压-电流双闭环,带宽可提到 1 kHz。
- 并网模式
当前 dq 变换使用固定角度,若接入电网,只需外扩 PLL(已在代码中预留虚拟 PLL 接口),即可实现 P/Q 控制。
- 更高开关频率
ePWM 模块最高 100 kHz,若换用 SiC/GaN 器件,只需调整 TBPRD 与死区寄存器,控制算法无需改动。
十一、版本记录
V1.0 2025-06 首版,通过 50 h 老化测试,THD、稳压精度、动态响应均达标。
—— 结束 ——

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 6
6 0
0- 0



 已为社区贡献43条内容
已为社区贡献43条内容

所有评论(0)