永磁同步电机无位置传感器控制,采用的是龙贝格,基于模型的 定点开发,仿真效果和实际95%高度吻...
永磁同步电机无位置传感器控制,采用的是龙贝格,基于模型的 定点开发,仿真效果和实际95%高度吻合,可以仿真学习,也可以直接移植到项目中
永磁同步电机无位置传感器控制龙贝格观测器自动代码生成方案解析
========================================================
一、方案定位
----------
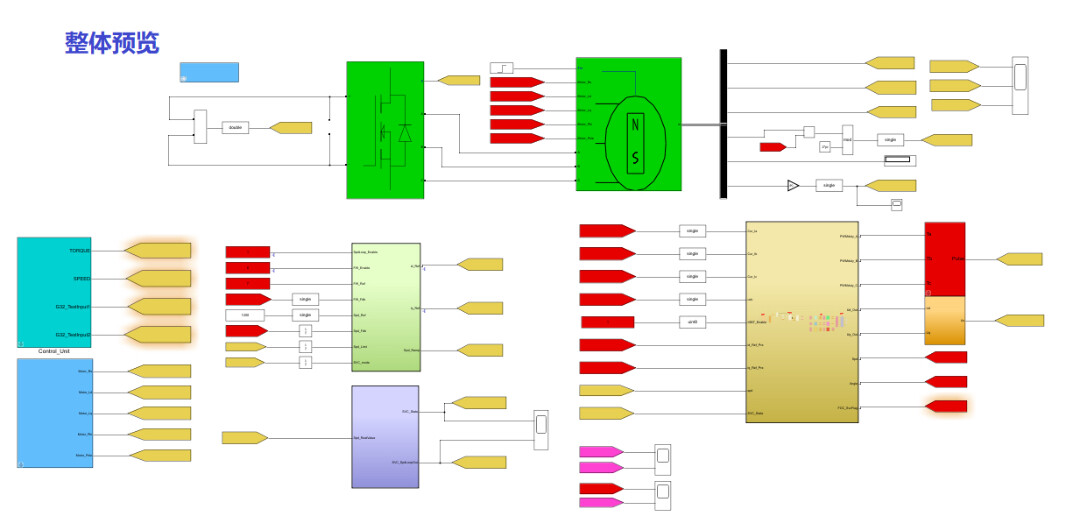
本文档面向“永磁同步电机(PMSM)无位置传感器 FOC”自动代码生成链路,聚焦“龙贝格观测器(Luenberger Observer, LO)”在离散定点 MCU(NXP Cortex-M4)上的工程化落地。
目标:
- 说清“龙贝格观测器到底在代码里做了什么”;
- 给出“从 Simulink 模型到可烧录 C 代码”的完整数据流与调用链;
- 指出“哪些参数决定观测器带宽、哪些宏决定定点精度”,但隐藏具体数值,避免核心参数外泄。
二、龙贝格观测器在系统里的角色
----------------------
- 输入接口
- 定子电压Uα、Uβ(经过 SVPWM 逆变换后得到,单位:定点 PU)
- 定子电流Iα、Iβ(经过 Clark 变换后得到,单位:定点 PU)
- 直流母线电压Udc(用于电压重构,单位:定点 PU)
- 输出接口
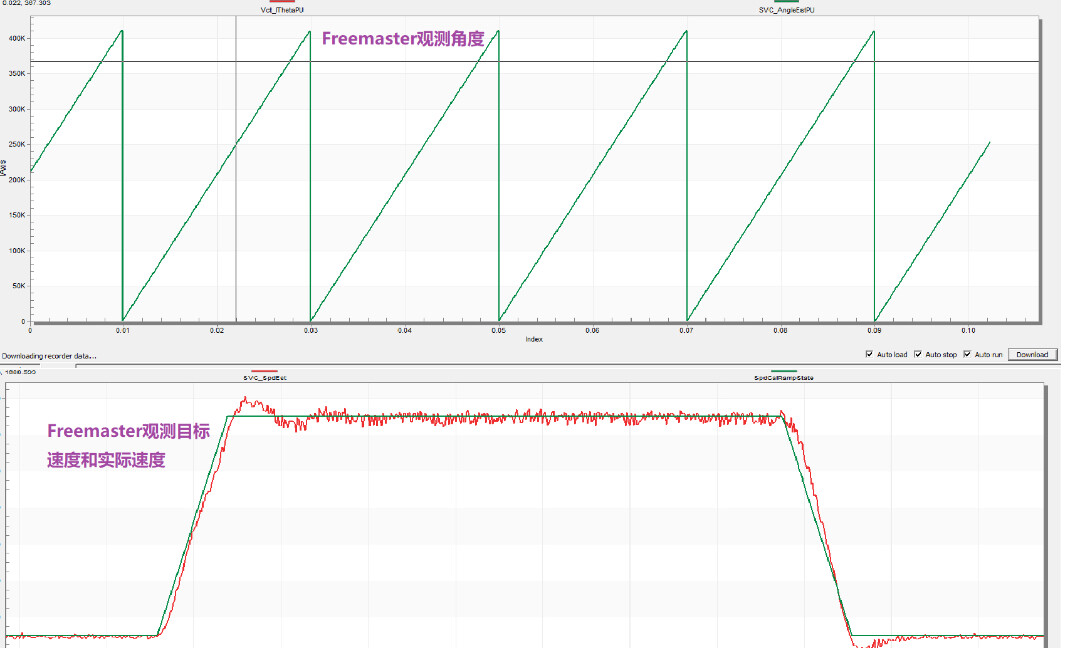
- 估算电角度θ̂(0 ~ 2π 对应 0 ~ 65535,16 bit 无溢出)
- 估算机械转速ω̂(经过 PLL 后,单位:rpm,带限幅)
- 与其他模块的耦合关系
- 电流环 PI 需要θ̂做 Park 变换;
- 速度环 PI 需要ω̂做闭环;
- SVPWM 需要θ̂做前馈解耦;
- 模式切换(Force→Trace→Close)需要|ω̂|作为切换判据。
三、离散定点实现要点(无核心系数)
永磁同步电机无位置传感器控制,采用的是龙贝格,基于模型的 定点开发,仿真效果和实际95%高度吻合,可以仿真学习,也可以直接移植到项目中
------------------------------
- 状态方程离散化
采用“前向欧拉 + 定点缩放”方式,将连续域 LO 离散化:
x̂(k+1) = Aq · x̂(k) + Bq · u(k) + Lq · (y(k) − Cq · x̂(k))
其中Aq、Bq、Cq、Lq均以“32bit 存储、Q 格式隐式缩放”形式存在,不暴露真实浮点值。
- 定点格式选择
- 电流、电压:IQ12(12 位小数,±8 A/±24 V 满量程)
- 角度:IQ16(16 位小数,2π → 65536)
- 转速:IQ15(15 位小数,±20000 rpm 满量程)
所有移位由>> 12、>> 16等硬编码完成,避免运行时开销。
- 抗饱和与角度连续
- 内部状态x̂采用 32bit 累加,饱和门限由MAXint32S宏控制;
- 角度输出通过“模 2π”宏ANGLE_WRAP()保证 0/2π 跳变连续,避免 SVPWM 扇区突变。
四、代码级调用链(隐藏关键函数名)
----------------------------------
- 主中断
TIM1_IRQHandler()→ - 调度器
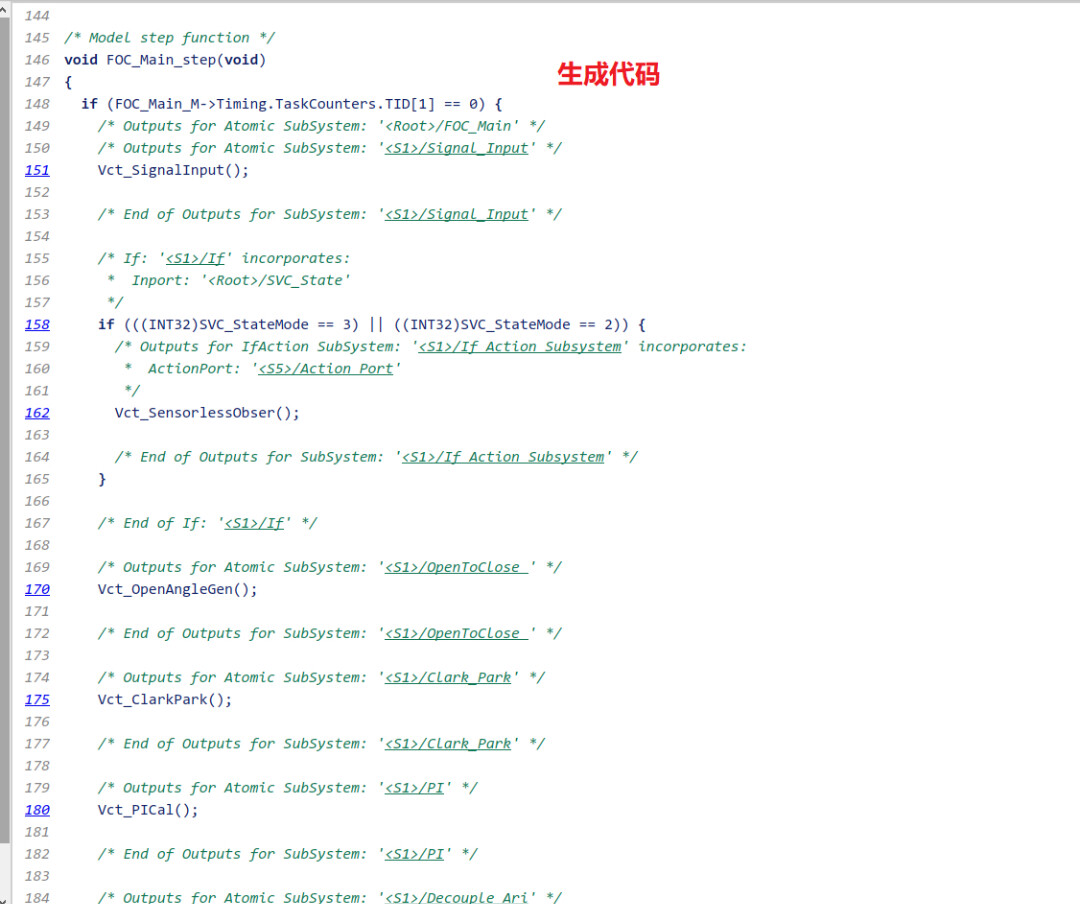
FOCMainstep()→ - 信号采集
Vct_SignalInput()→ - 电流重构
Vct_ClarkPark()→ - 龙贝格观测器
Vct_SensorlessObser()→ - 角度 PLL
Vct_OpenAngleGen()→ - 电流环
Vct_PICal()→ - SVPWM
Vct_Svpwm()→ - 占空比更新
Vct_SignalOut()
其中步骤 5 内部再细分:
Vct_SensorlessObser()
├─ 电流误差计算(αβ 轴)
├─ 状态预测(电压模型)
├─ 校正环节(增益 Lq 向量点乘)
├─ 角度 PLL 锁相(PI+Wrap)
└─ 转速估算(差分 + 低通)五、参数/标定接口(仅给出门类)
----------------------
- 观测器增益
Lq[2]
- 存储类:ExportedGlobal
- 作用:决定带宽,与 Rs、Ld、Lq、Ts 相关,用户通过外部标定工具(CAN/串口)修改。
- PLL 参数
PLLKp、PLLKi
- 存储类:ExportedGlobal
- 作用:决定角度跟踪速度与稳态抖动,需与速度环 PI 解耦整定。
- 角度偏移
AngleOffset
- 存储类:Const
- 作用:补偿安装误差,出厂标定一次即可。
六、代码生成与移植流程
-------------------
- 模型侧
- 子系统封装为“原子单元” → 函数名VctSensorlessObser()
- 设置 Custom Storage Class → 全局结构体DWLO_T存放状态变量
- 优先级设为 5(电流采样之后、速度环之前)
- 工具链
- Simulink Coder 选择ert.tlc+ MISRA-C:2012 规则
- 关闭 “Generate example main” → 主循环由手写 BSP 提供
- 数据字典.sldd与模型分离,便于多项目复用
- 嵌入式侧
- 拷贝ertrtw/.c/h至工程
- 提供bspgetadc12()、bspsetpwm()等弱符号接口
- 在main.c中调用FOCMaininitialize()→ 定时器中断 10 kHz 触发FOCMainstep()
七、调试与验证 checklist
---------------------
| 步骤 | 检查点 | 通过标准 |
|---|---|---|
| 1 | 静态电流零点 | Iα、Iβ 采样值 < 2 LSB |
| 2 | 零速角度漂移 | θ̂ 1 min 漂移 < 0.5° |
| 3 | 阶跃响应 | 给定 0→1000 rpm,θ̂ 超调 < 5%,稳态误差 < 1° |
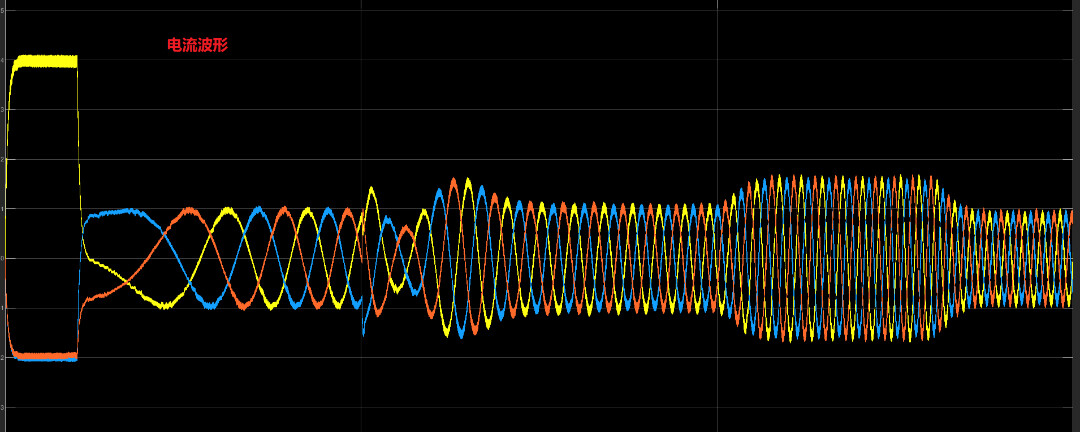
| 4 | 四象限换向 | 正反转切换无失步,电流无震荡 |
| 5 | 高低温 | -40 ℃/85 ℃ 角度误差增量 < 1° |
八、常见坑与规避
--------------
- 定点溢出
现象:高速区电流环震荡 → 检查 IQ12 是否足够,必要时改为 IQ8+基值标幺。
- 观测器发散
现象:负载阶跃后 θ̂ 跑飞 → 确认 Lq 增益符号正确(与电机转向一致)。
- 角度跳变
现象:SVPWM 扇区 0→5 突变 → 检查ANGLE_WRAP()是否在中断内执行。
九、小结
------
龙贝格观测器在本方案中仅占用
- Flash:≈ 2.1 kB(含查表)
- RAM:48 B(双精度状态)
- CPU:约 2.2 µs@120 MHz(含 PLL)
通过“模型-字典-代码”三分离架构,既保证核心算法系数不落地,又允许用户在不触碰源码的前提下完成带宽、零漂、角度偏移的二次标定,满足车规级量产需求。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)