基于小信号建模的下垂控制稳定分析,文章完全浮现。 关键词:微电网,下垂控制,小信号模型,根轨迹...
·
基于小信号建模的下垂控制稳定分析,文章完全浮现。 关键词:微电网,下垂控制,小信号模型,根轨迹,稳定性。
该组MATLAB代码通过小信号建模与根轨迹法,分析不同系统参数对微电网下垂控制稳定性的影响,核心是通过计算特征方程根的位置(实轴与虚轴坐标)判断系统是否稳定(根全部位于左半平面则稳定)。
一、代码文件概览
五份代码文件分别聚焦不同参数变量,固定其他参数不变,通过循环迭代改变目标参数,生成根轨迹图。所有文件均忽略电压电流内环因素,仅围绕核心参数与下垂控制系数展开分析。
| 文件名 | 核心变量 | 变量迭代范围 | 固定关键参数 |
|---|---|---|---|
| RX_bh.m | 电阻R与电抗X(X=6R) | R:0.05~2.5,步长0.05 | kp=0.001,kq=0.001,wf=20 |
| R_bh.m | 电阻R | R:0.1~5,步长0.1 | X=2,kp=0.001,kq=0.001,wf=20 |
| X_bh.m | 电抗X | X:0.1~10,步长0.1 | R=0.5,kp=0.001,kq=0.001,wf=20 |
| kpkq_bh.m | 下垂控制系数kp与kq(kq=kp) | kp:0.001~0.1,步长0.001 | R=0.5,X=2,wf=20 |
| wf_bh.m | 角频率wf | wf:10~1000,步长1 | R=0.5,X=2,kp=0.001,kq=0.001 |
二、核心计算逻辑
所有文件遵循统一的计算流程,仅目标变量不同,具体步骤如下:
- 参数初始化:设定固定参数(如Ee=214V、Ve=212V、delta=0.0643rad)与目标变量的迭代范围、步长。
- 传递系数计算:根据R、X的当前值,通过公式计算kpe、kpd、kqe、kqd四个传递系数,反映系统功率与电压、相位的关联特性。
- 特征方程构建:基于传递系数与下垂控制参数,生成三阶特征方程的系数向量den=[1, a, b, c],其中a、b、c由固定参数与传递系数推导得出。
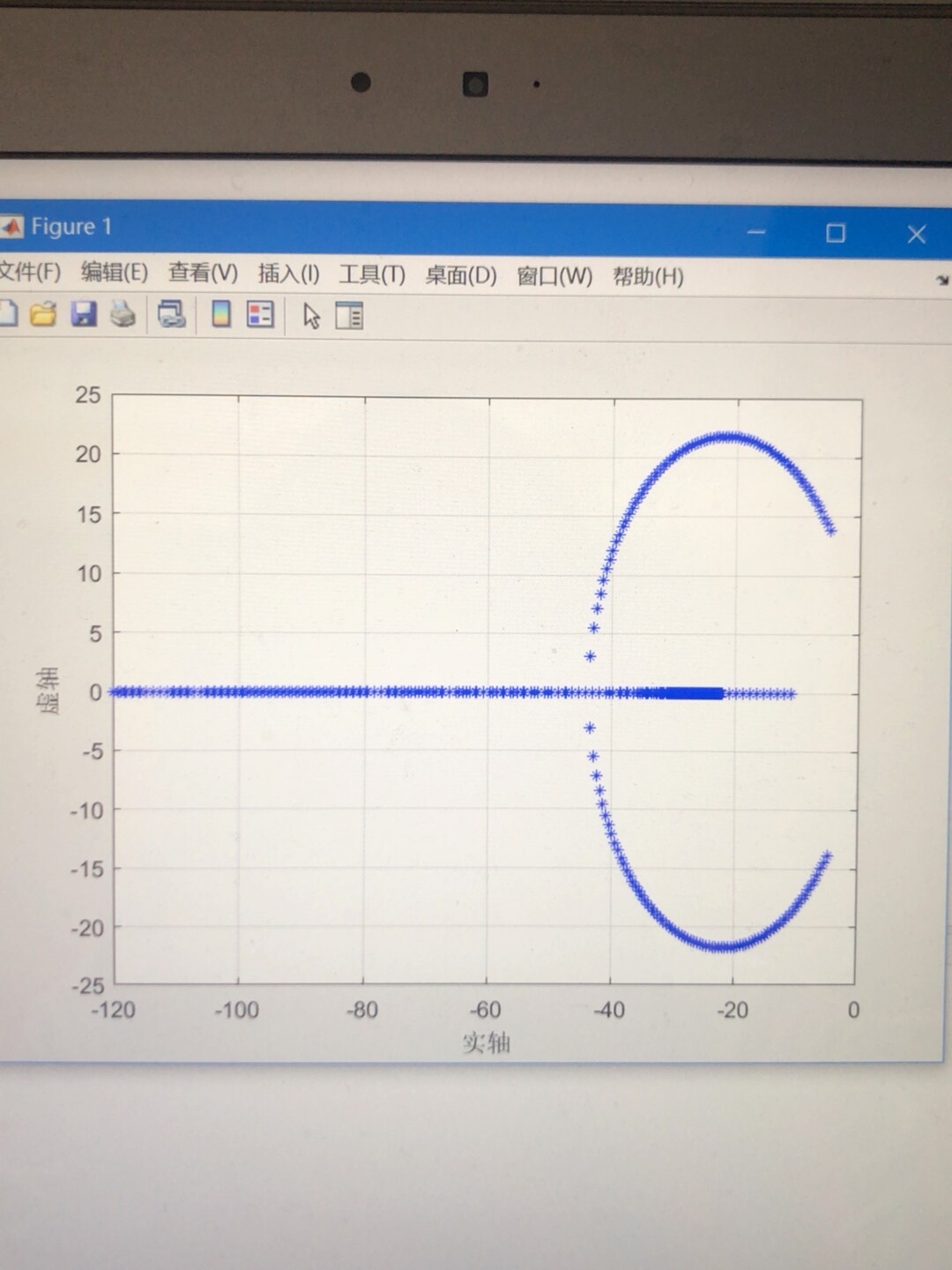
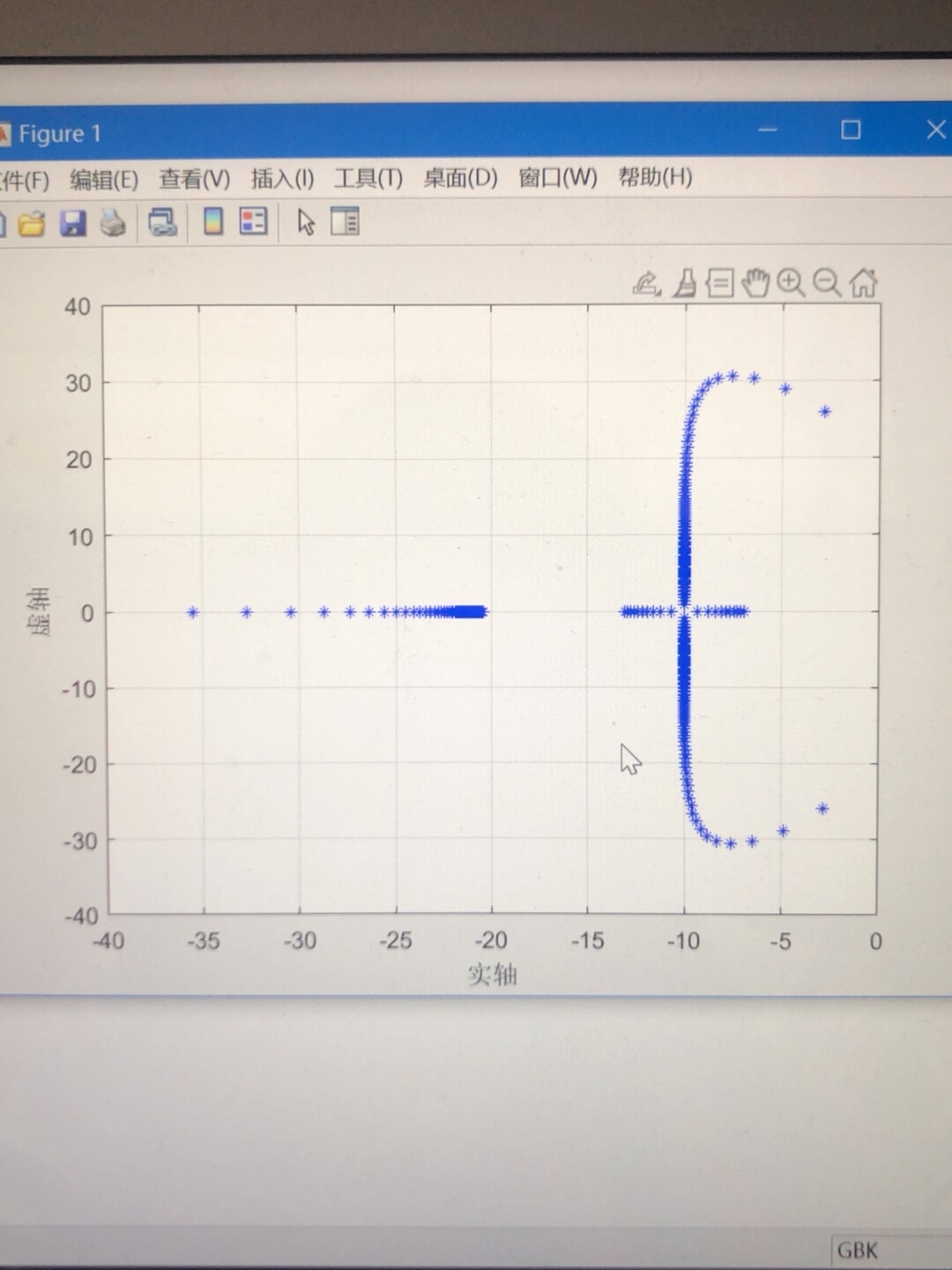
- 根轨迹生成:求解特征方程的根,提取根的实部(rel)与虚部(img),以蓝色星号在复平面绘制根的位置,形成根轨迹图。
- 图形配置:固定坐标轴范围(如RX_bh.m轴范围为实轴-35~0、虚轴-60~60),添加网格与坐标轴标签,便于观察参数变化对根位置的影响。
三、稳定性判断依据
代码通过复平面根的位置直接反映系统稳定性,核心规则如下:
- 若所有根的实部均小于0(位于复平面左半区域),则系统稳定,扰动后能恢复平衡状态。
- 若存在根的实部大于0(位于复平面右半区域),则系统不稳定,扰动后会出现发散现象。
- 若根的实部等于0(位于虚轴上),则系统处于临界稳定状态,可能出现持续振荡。
四、各文件分析重点
- RX_bh.m:分析R与X按固定比例(X=6R)变化时的稳定性,适用于研究阻抗比例对系统的影响。
- R_bh.m:单独分析电阻R变化的影响,可观察负荷电阻或线路电阻对下垂控制稳定性的敏感程度。
- X_bh.m:单独分析电抗X变化的影响,聚焦线路电抗或滤波电抗对系统稳定边界的作用。
- kpkq_bh.m:分析下垂控制系数kp、kq同步变化的影响,为下垂控制参数的整定提供依据(如kp过大会导致根右移,降低稳定性)。
- wf_bh.m:分析系统角频率wf变化的影响,适用于不同频率等级微电网的稳定性对比。
要不要我帮你整理一份各文件核心参数与稳定性影响的对照表?表格会明确不同参数变化时,系统稳定边界的大致范围,方便快速查阅关键结论。
基于小信号建模的下垂控制稳定分析,文章完全浮现。 关键词:微电网,下垂控制,小信号模型,根轨迹,稳定性。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 7
7 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)