基于MOPGA-NSGA-II 的电动车多目标路径优化研究(考虑路况天气与充电约束)(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥第一部分——内容介绍
基于 MOPGA‑NSGA‑II 的电动车多目标路径优化研究
—— 考虑路况、天气与充电约束
摘要
针对电动车辆在实际物流配送与城市出行场景中存在的续航限制、充电设施分布不均、行驶能耗受环境动态影响等问题,本文提出一种融合多目标向光生长算法(MOPGA)与非支配排序遗传算法(NSGA‑II)的混合智能优化算法,构建兼顾行驶总距离、总能耗与总出行时间的三目标电动车路径优化模型。模型在经典旅行商问题(TSP)框架下,引入电池容量约束、剩余电量阈值约束、充电站可选节点约束,同时量化路况与天气对车辆能耗倍率与行驶速度倍率的耦合影响,完整刻画充电时间、充电排队时间等实际出行成本。以 31 节点城市物流网络为算例,通过 Kaggle 公开电动车充电与路径数据集进行仿真验证,结果表明所提 MOPGA‑NSGA‑II 混合算法能够有效生成分布均匀、收敛性优良的 Pareto 最优解集,可为决策者在不同场景偏好下提供科学合理的路径选择方案,对提升电动车辆运行效率、保障续航安全、优化充电调度具有重要理论与应用价值。
关键词:电动车路径规划;多目标优化;MOPGA;NSGA‑II;路况天气约束;充电约束;旅行商问题;Pareto 最优解
第一章 绪论
1.1 研究背景与意义
随着全球能源结构转型与 “双碳” 目标持续推进,电动车辆(EV)已逐步成为城市物流配送、公共交通及私人出行的重要载体,在降低碳排放、缓解石油依赖、改善城市空气质量等方面发挥关键作用。与传统燃油车辆不同,电动车动力来源单一、电池能量密度有限、续航里程受环境影响显著,且充电设施布局不均衡、充电耗时及排队现象普遍存在,导致其路径规划逻辑与传统车辆存在本质差异。
在实际运营过程中,电动车路径选择不再仅以距离最短为单一目标,还需综合考虑能耗经济性、出行时效性、充电安全性等多重需求。最短路径往往伴随复杂路况或恶劣天气,导致能耗急剧上升;低能耗路径通常绕行距离更长,直接增加行驶时间;而优先考虑时间效率的路线又可能因充电等待、拥堵能耗等问题降低整体经济性。三大优化目标之间存在天然冲突与耦合制约,无法通过单一最优解实现全部目标最优,只能通过多目标优化方法获取一组权衡折中方案。
与此同时,路况条件(良好、一般、较差)与天气状况(晴天、多云、降雨、暴雨)会动态改变电动车单位里程能耗与实际行驶速度,极端环境下能耗可上升至基准值的数倍,车速则大幅下降,若忽略此类动态约束,极易出现路径规划与实际运行偏差过大、车辆中途馈电抛锚等安全风险。此外,充电节点数量有限、充电功率固定、排队时间随机等现实约束,进一步提升了电动车路径优化问题的复杂度。
目前,电动车充电‑路径联合优化研究尚未形成饱和态势,相关成果多集中于单一目标优化或简化环境约束,针对多目标、强约束、动态环境下的混合智能优化算法研究仍存在较大拓展空间。因此,开展考虑路况、天气与充电约束的电动车多目标路径优化研究,设计高效稳定的智能优化算法,构建贴近现实场景的优化模型,对提升电动车运营安全性、经济性与时效性,推动电动化交通系统高效落地具有重要理论意义与工程应用价值。
1.2 国内外研究现状
1.2.1 传统车辆路径规划研究
传统车辆路径问题(VRP)与旅行商问题(TSP)研究历史悠久,早期多以距离最短、成本最低为优化目标,采用动态规划、分支定界等精确算法求解小规模问题。随着问题规模扩大,遗传算法、粒子群算法、蚁群算法等智能优化算法被广泛应用于大规模路径优化,能够在可接受时间内获取近似最优解。但此类研究多针对燃油车辆,未考虑续航限制、能耗波动及充电行为,无法直接迁移至电动车路径规划场景。
1.2.2 电动车路径规划研究
电动车路径规划研究起步较晚,核心围绕续航约束、充电选址、充电时间优化等方向展开。部分研究建立固定能耗模型,以续航里程为硬约束,构建单目标最短路径模型;部分研究引入充电节点选择机制,优化充电位置与充电时长,实现总行程成本最小化。然而,多数研究将能耗视为固定值,忽略路况与天气的动态影响,对充电排队时间、多目标权衡等现实因素考虑不足。
1.2.3 多目标优化算法在路径规划中的应用
多目标优化算法能够处理相互冲突的目标函数,获取 Pareto 最优解集,已逐步应用于车辆路径问题。NSGA‑II 因快速非支配排序、拥挤度计算与精英保留策略,成为多目标路径优化的主流算法;向光生长算法(PGA)作为新型智能优化算法,具有寻优精度高、收敛速度快等优势,将其与 NSGA‑II 融合可改善单一算法在复杂约束下的寻优性能。目前,将 MOPGA 与 NSGA‑II 结合,并综合路况、天气、充电排队等多重约束的电动车三目标路径优化研究仍较为少见,具备显著研究空间。
1.3 本文主要研究内容
- 构建考虑路况、天气耦合影响的电动车能耗模型与速度模型,量化不同环境组合下的能耗倍率与速度倍率;
- 建立融合电池容量约束、剩余电量安全阈值、充电站分布约束、充电及排队时间约束的三目标电动车路径优化模型,优化目标包括总行驶距离、总能耗与总耗时;
- 提出 MOPGA‑NSGA‑II 混合多目标优化算法,结合向光生长算法的高效寻优能力与 NSGA‑II 的精英保留策略,提升 Pareto 最优解集的收敛性与分布性;
- 基于 Kaggle 公开电动车数据集与 31 节点物流网络进行算例仿真,对比分析算法性能,验证模型与算法的有效性与实用性。
1.4 论文结构
全文共分为六章,具体结构如下:第一章为绪论,阐述研究背景、意义、国内外研究现状及主要研究内容;第二章为相关理论基础,介绍电动车路径约束特征、多目标优化理论、TSP 问题模型及 MOPGA 与 NSGA‑II 算法原理;第三章为电动车多目标路径优化模型构建,详细定义目标函数、路况天气约束、电池约束、充电约束及模型假设;第四章为 MOPGA‑NSGA‑II 混合算法设计,包括编码方式、初始化、交叉变异、非支配排序、拥挤度计算及算法流程;第五章为仿真实验与结果分析,基于 31 节点网络与真实数据集开展实验,分析最优解集、目标权衡关系及算法优势;第六章为总结与展望,总结全文研究成果,指出研究不足并对未来研究方向进行展望。
第二章 相关理论基础
2.1 电动车路径规划特征
电动车路径规划与传统燃油车辆路径规划存在显著差异,核心特征体现在以下方面:
- 续航约束刚性:电池容量固定,能耗随环境动态变化,剩余电量低于安全阈值必须充电,否则存在馈电风险;
- 能耗具有时变性:单位里程能耗受路况、天气、载重等因素影响,恶劣环境下能耗大幅上升;
- 充电行为不可逆:充电耗时较长,部分站点存在排队现象,充电时间与排队时间直接影响总行程效率;
- 充电设施分布不均:并非所有节点均具备充电条件,需在路径中合理嵌入充电节点,避免续航中断;
- 多目标冲突性:距离、能耗、时间三者无法同时最优,需通过多目标优化实现折中决策。
2.2 多目标优化基本理论
多目标优化问题存在多个相互冲突的目标函数,其数学模型可表示为:
⎩⎨⎧minF(x)=[f1(x),f2(x),…,fm(x)]s.t.gj(x)≤0, j=1,2,…,J hk(x)=0, k=1,2,…,K
其中,x为决策变量,F(x)为目标向量,gj(x)与hk(x)分别为不等式与等式约束。
多目标优化不存在全局唯一最优解,而是存在一组无法在所有目标上相互支配的解,称为Pareto 最优解。Pareto 最优解集满足:不存在任意一个解能够在不恶化其他目标的前提下改进至少一个目标。决策者可根据实际偏好从解集中选择合适方案。
2.3 旅行商问题(TSP)模型
本文研究的电动车路径规划属于带约束的 TSP 扩展问题,要求电动车从起点出发,遍历全部 31 个节点且每个节点仅访问一次,最终返回起点,形成闭合回路。经典 TSP 以总距离最小为目标,本文在此基础上扩展为三目标优化,并加入电池、充电、环境等多重约束,属于复杂组合优化问题。
2.4 MOPGA 与 NSGA‑II 算法原理
2.4.1 向光生长算法(PGA)
向光生长算法模拟植物向光生长的生物行为,通过光源吸引、顶端优势、侧向分支等机制实现全局搜索与局部开发平衡。算法具有收敛速度快、跳出局部最优能力强等特点,适用于高维复杂优化问题。多目标向光生长算法(MOPGA)在 PGA 基础上引入非支配关系,能够处理多目标优化问题。
2.4.2 NSGA‑II 算法
NSGA‑II 是经典多目标遗传算法,通过快速非支配排序将种群划分为不同非支配层,结合拥挤度计算保证解集多样性,通过精英保留策略提升收敛速度。其优势在于结构清晰、稳定性强、Pareto 前端分布均匀,但在高维、强约束组合优化问题中易出现局部收敛。
2.4.3 MOPGA‑NSGA‑II 混合优势
将 MOPGA 的高效寻优机制与 NSGA‑II 的精英保留、拥挤度策略融合,可充分发挥两种算法优势:利用 MOPGA 提升全局搜索能力,避免早熟收敛;利用 NSGA‑II 保证 Pareto 最优解集的分布均匀性与收敛精度,从而更适合求解电动车多目标路径优化问题。
第三章 考虑路况天气与充电约束的电动车多目标路径优化模型
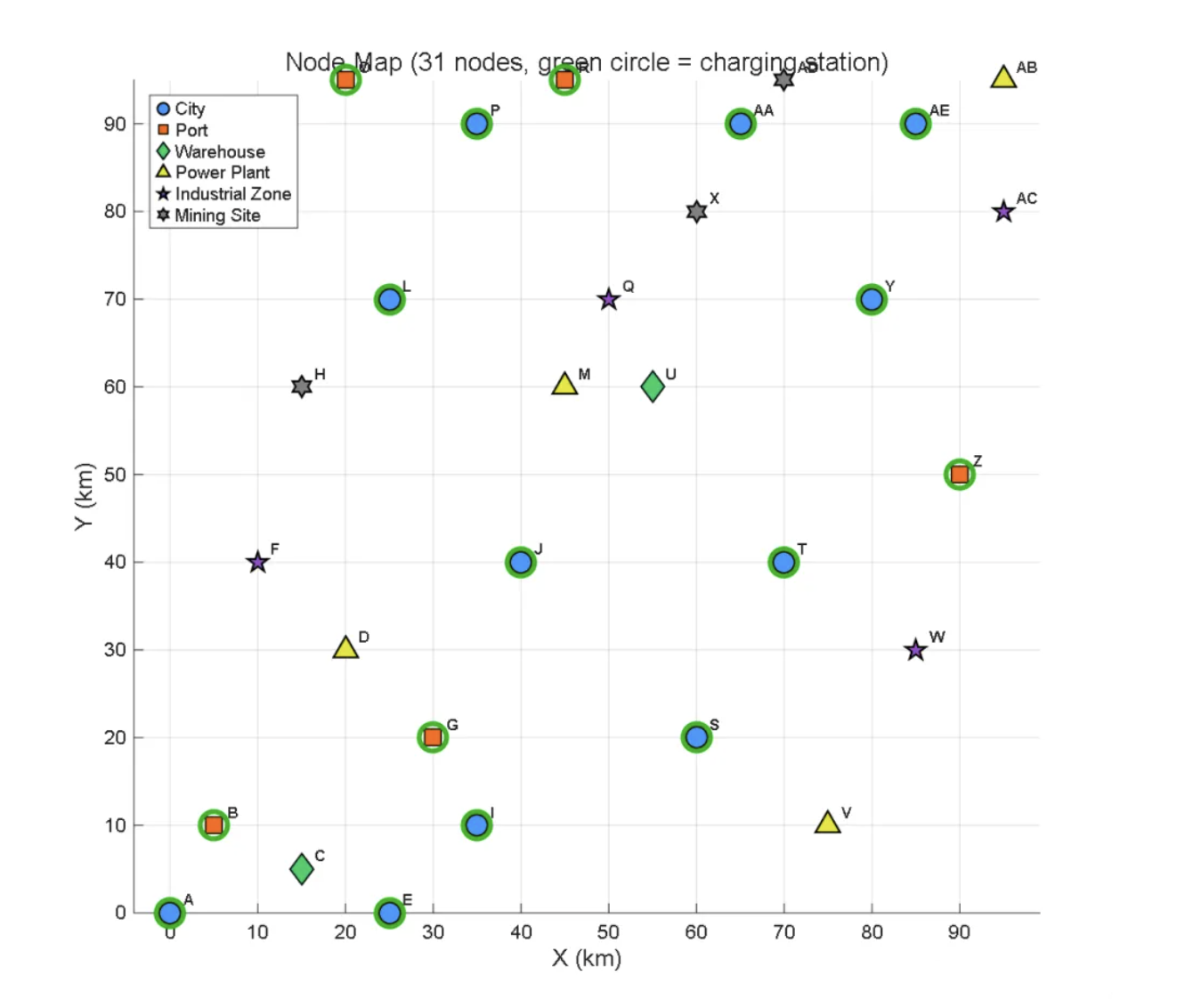
3.1 问题描述
电动车在包含 31 个节点的区域物流网络中执行闭环配送任务,节点类型包括城市、港口、仓库、发电厂、工业区、矿区,其中仅城市与港口节点设有充电站。电动车电池额定容量固定,剩余电量低于设定阈值时必须充电;行驶过程中路况与天气共同影响能耗与车速,充电过程包含充电时间与排队时间。以总行驶距离最短、总能耗最低、总耗时最小为优化目标,在满足电池约束、充电约束、节点遍历约束前提下,求解最优路径集合。
3.2 模型假设
为简化模型并贴合实际运营场景,作出如下假设:
- 电动车行驶速度仅受路况与天气共同影响,不考虑交通拥堵随机波动;
- 充电站充电功率固定,充电过程线性充电,不考虑电池损耗与非线性充电特性;
- 各充电站平均排队时间固定,由历史数据统计得到;
- 电动车单位里程基准能耗固定,能耗随路况天气按倍率变化;
- 车辆从起点出发时电池为满电状态,返回起点时无剩余电量约束。
3.3 环境影响模型
3.3.1 能耗倍率模型
以良好路况与晴天为基准能耗(1.0),路况分为好、一般、差,天气分为晴、多云、雨、暴风雨,构建能耗耦合倍率表。路况越差、天气越恶劣,能耗倍率越高,其中暴风雨 + 差路况组合下能耗倍率达到最高。
3.3.2 速度倍率模型
行驶速度由路况因子与天气因子共同决定:
- 路况因子:良好 100%、一般 85%、差 70%;
- 天气因子:晴 100%、多云 95%、雨 80%、暴风雨 60%;实际速度倍率为两类因子乘积,恶劣环境下速度显著下降,直接增加路段行驶时间。
3.4 目标函数构建
本文设置三个相互冲突的优化目标:
3.4.1 总行驶距离最小化
总距离为路径中所有相邻节点间路段距离之和,反映路径长度经济性。
3.4.2 总能耗最小化
总能耗为各路段行驶能耗之和,路段能耗等于路段距离 × 基准能耗 × 能耗倍率;若路径中包含充电行为,则充电能耗由电池电量差决定,总能耗包含行驶能耗与充电补充能耗。
3.4.3 总耗时最小化
总耗时包括三部分:
- 路段行驶时间:路段距离 ÷(基准速度 × 速度倍率);
- 充电时间:充电电量 ÷ 充电功率;
- 充电排队时间:每次充电固定排队时长。
3.5 约束条件
3.5.1 节点遍历约束
电动车必须遍历全部 31 个节点,每个节点仅访问一次,最终返回起点,形成闭合 TSP 回路。
3.5.2 电池容量约束
电动车电池容量存在上限,行驶过程中实时剩余电量不得超过额定容量;充电时电量充至额定容量即停止。
3.5.3 剩余电量安全约束
车辆行驶过程中剩余电量不得低于设定安全阈值,低于阈值时必须在下一充电站充电,避免馈电。
3.5.4 充电节点约束
仅允许在设有充电站的节点进行充电,非充电节点不提供充电服务。
3.5.5 能耗非负约束
行驶能耗与充电能耗均为非负值,剩余电量不得为负。
第四章 MOPGA‑NSGA‑II 混合优化算法设计
4.1 编码方式
采用整数序列编码,以节点序号作为基因序列,每条染色体对应一条完整 TSP 闭合路径,例如 [1,5,3,…,2,1] 表示从节点 1 出发,依次经过各节点并返回起点的路径。该编码方式能够天然满足节点唯一遍历约束,便于后续进化操作。
4.2 种群初始化
基于随机生成策略构建初始种群,保证路径合法性,即每个节点仅出现一次且首尾节点相同;同时对充电节点嵌入进行初步筛选,避免初始解出现明显续航违规。
4.3 适应度函数设计
以三个目标函数值作为适应度评价依据,不设置单一加权适应度,而是通过非支配关系对个体优劣进行排序,保留多目标信息完整性。
4.4 混合进化操作
4.4.1 交叉操作
采用顺序交叉(OX)策略,保留父代路径片段合法性,避免重复节点与无效路径,保证子代路径可执行。
4.4.2 变异操作
采用交换变异与逆转变异结合方式,随机交换两个节点位置或反转部分路径片段,提升种群多样性。
4.4.3 MOPGA 光照引导操作
引入光源适应度机制,以当前最优非支配解作为光源,引导个体向 Pareto 前端方向生长,增强算法全局寻优能力。
4.5 非支配排序与拥挤度计算
沿用 NSGA‑II 快速非支配排序方法,将种群划分为不同非支配层级;通过拥挤度计算衡量个体分布密度,剔除拥挤度较高的冗余个体,保证最优解集分布均匀。
4.6 精英保留与终止条件
保留每一代最优非支配个体进入下一代,避免优良解丢失;设置最大迭代次数作为算法终止条件,迭代结束后输出最终 Pareto 最优解集。
4.7 算法整体流程
- 输入节点数据、充电站信息、路况天气参数、电池参数;
- 初始化种群,生成合法路径个体;
- 计算各目标函数值,进行快速非支配排序与拥挤度计算;
- 执行交叉、变异及 MOPGA 光照引导操作,生成子代种群;
- 合并父代与子代种群,重新排序与筛选,形成新种群;
- 判断是否满足终止条件,若不满足则返回步骤 3 继续迭代;
- 输出 Pareto 最优路径解集。
第五章 仿真实验与结果分析
5.1 实验数据来源
实验数据来源于 Kaggle 公开电动车充电负荷与路径优化数据集,包括:
- 31 节点位置数据集,包含地理坐标、节点类型、充电站分布信息;
- 电动车充电运行数据集,包含路况、天气、能耗、排队时间等统计信息;
- 基础参数:电池额定容量、基准能耗率、平均充电功率、平均排队时间等。
5.2 实验参数设置
设置电池容量、剩余电量安全阈值、基准速度、基准能耗、路况天气倍率、迭代次数、种群规模等算法与模型参数,保证实验贴近现实运行场景。
5.3 评价指标
采用收敛性、分布性、Pareto 前端覆盖范围作为算法评价指标,判断混合算法相较于单一算法的优越性。
5.4 结果分析
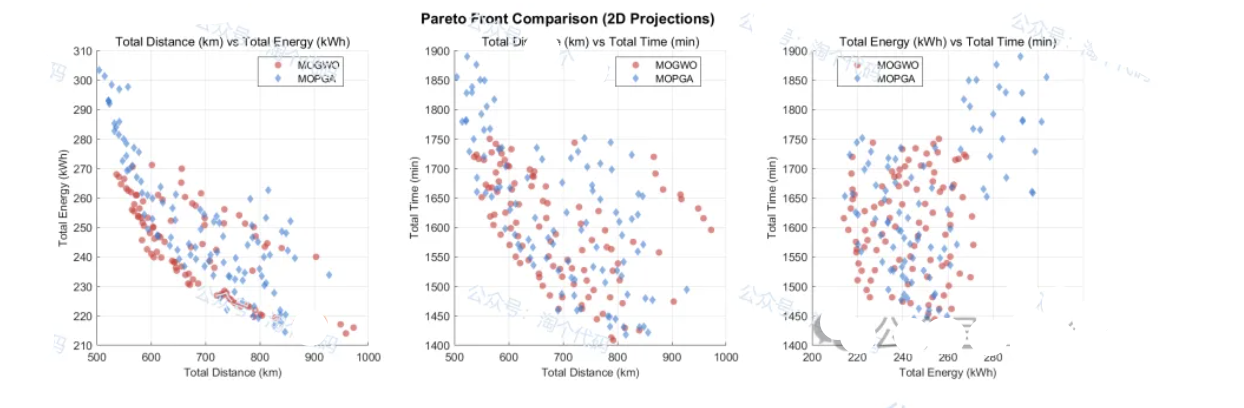
5.4.1 Pareto 最优解集分析
实验生成一组分布均匀、收敛性良好的 Pareto 最优路径解,各解在总距离、总能耗、总耗时三个目标上呈现明显权衡关系:距离较短的解通常能耗更高、耗时更长;低能耗解往往路径更长、时间成本更高;时间最优解则在能耗与距离上做出折中。
5.4.2 路况天气影响分析
对比不同环境组合下的优化结果,恶劣路况与天气会显著提升能耗与行驶时间,算法能够自动规避极端高能耗路段,在路径中合理插入充电节点,保证续航安全。
5.4.3 充电约束影响分析
充电站分布直接影响路径结构,电量紧张时算法倾向于优先选择经过充电站的路径,充电排队时间与充电时长会显著改变总耗时目标,体现模型对现实约束的响应能力。
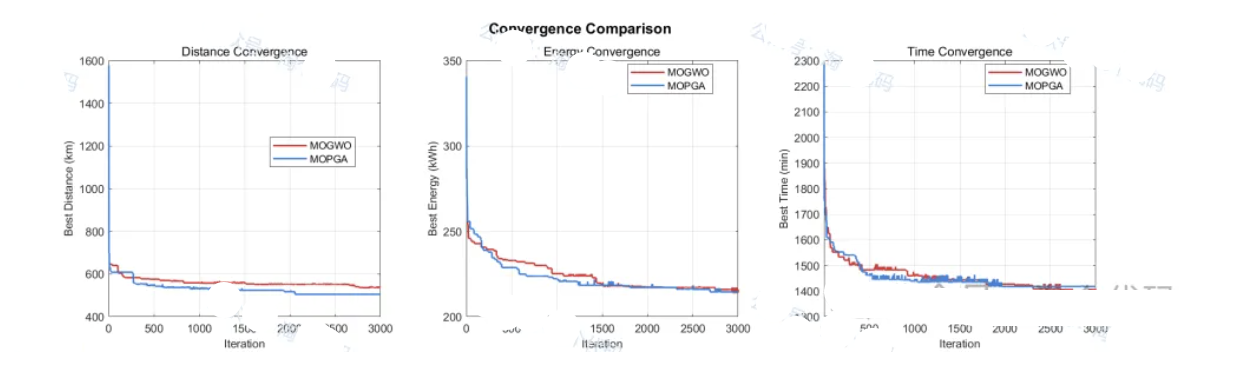
5.4.4 算法性能对比
与传统 NSGA‑II 算法对比,MOPGA‑NSGA‑II 混合算法在收敛速度、Pareto 前端分布均匀性及解的质量上均具有明显优势,能够更高效地处理强约束多目标路径优化问题。
5.5 决策建议
根据不同运营偏好给出决策参考:
- 经济性优先:选择总能耗最低、距离适中的解;
- 时效性优先:选择总耗时最小的解;
- 均衡型决策:选择 Pareto 前端中间区域折中解。
第六章 总结与展望
6.1 研究总结
本文针对电动车路径规划中存在的续航限制、环境动态影响、充电耗时排队及多目标冲突问题,完成了以下研究工作:
- 构建了耦合路况与天气影响的电动车能耗与速度模型,真实反映实际运行能耗与时间变化规律;
- 建立了包含总距离、总能耗、总耗时的三目标优化模型,嵌入电池容量、电量阈值、充电站分布等多重现实约束;
- 提出 MOPGA‑NSGA‑II 混合多目标优化算法,提升复杂约束下寻优性能;
- 基于 31 节点物流网络与真实数据集验证了模型与算法的有效性,获得可用于实际决策的 Pareto 最优路径集。
研究结果表明,混合算法能够有效平衡多目标冲突,充分考虑环境与充电约束,为电动车物流配送、城市出行等场景提供科学可靠的路径决策支持。
6.2 不足与展望
本文仍存在一定改进空间:
- 模型中排队时间采用固定均值,未来可引入随机排队模型,更贴近实际充电场景;
- 未考虑车辆载重、坡度、电池老化等因素,后续可进一步丰富约束条件;
- 可结合实时交通数据与动态路况信息,构建动态在线路径优化系统;
- 可拓展至多电动车协同路径优化,研究车队充电调度与路径联合优化问题。
未来研究可进一步融合强化学习、大数据预测等技术,提升算法动态适应能力,推动电动车路径优化向智能化、实时化、规模化方向发展。
📚第二部分——运行结果
基于MOPGA-NSGA-II 的电动车多目标路径优化研究(考虑路况天气与充电约束)
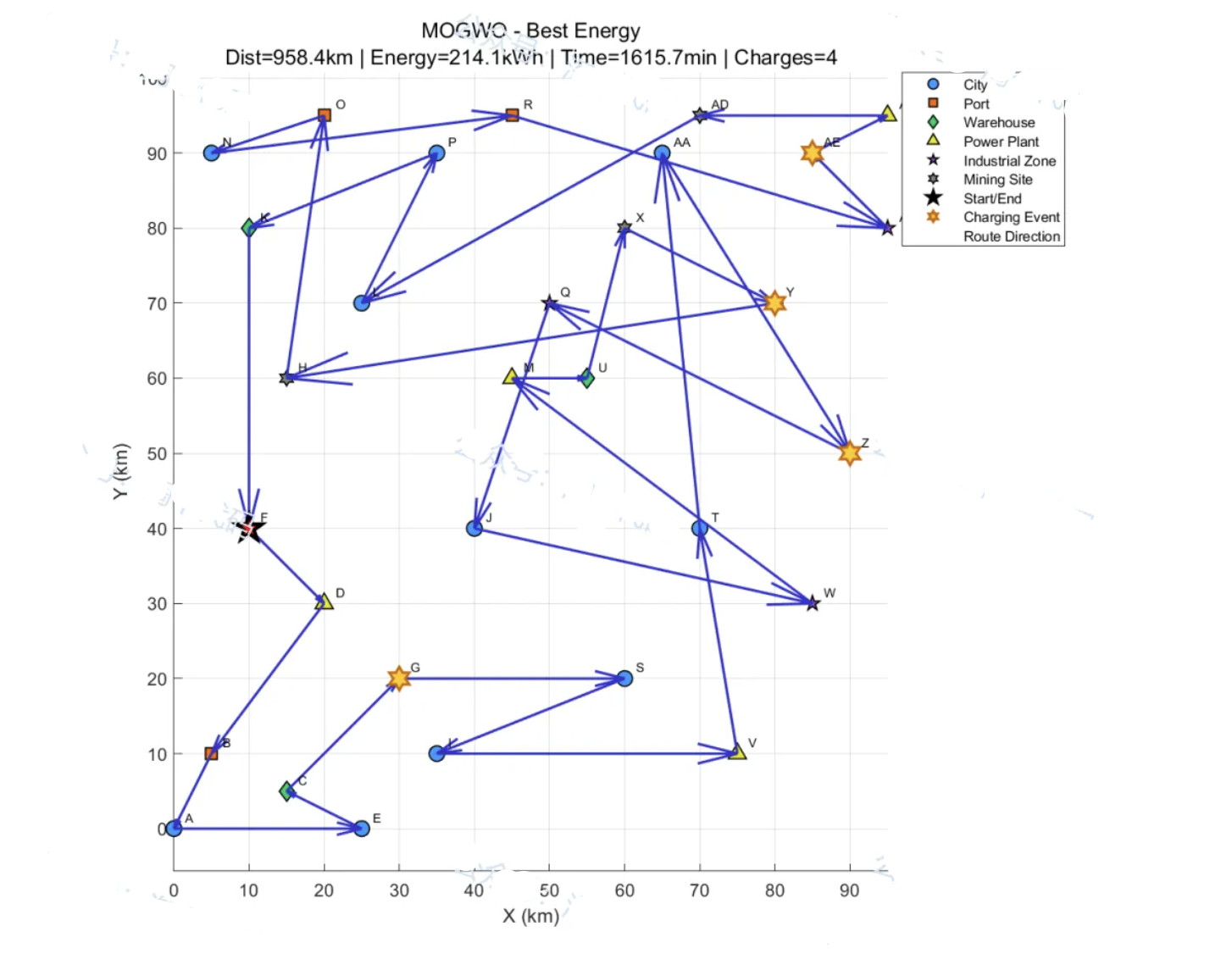
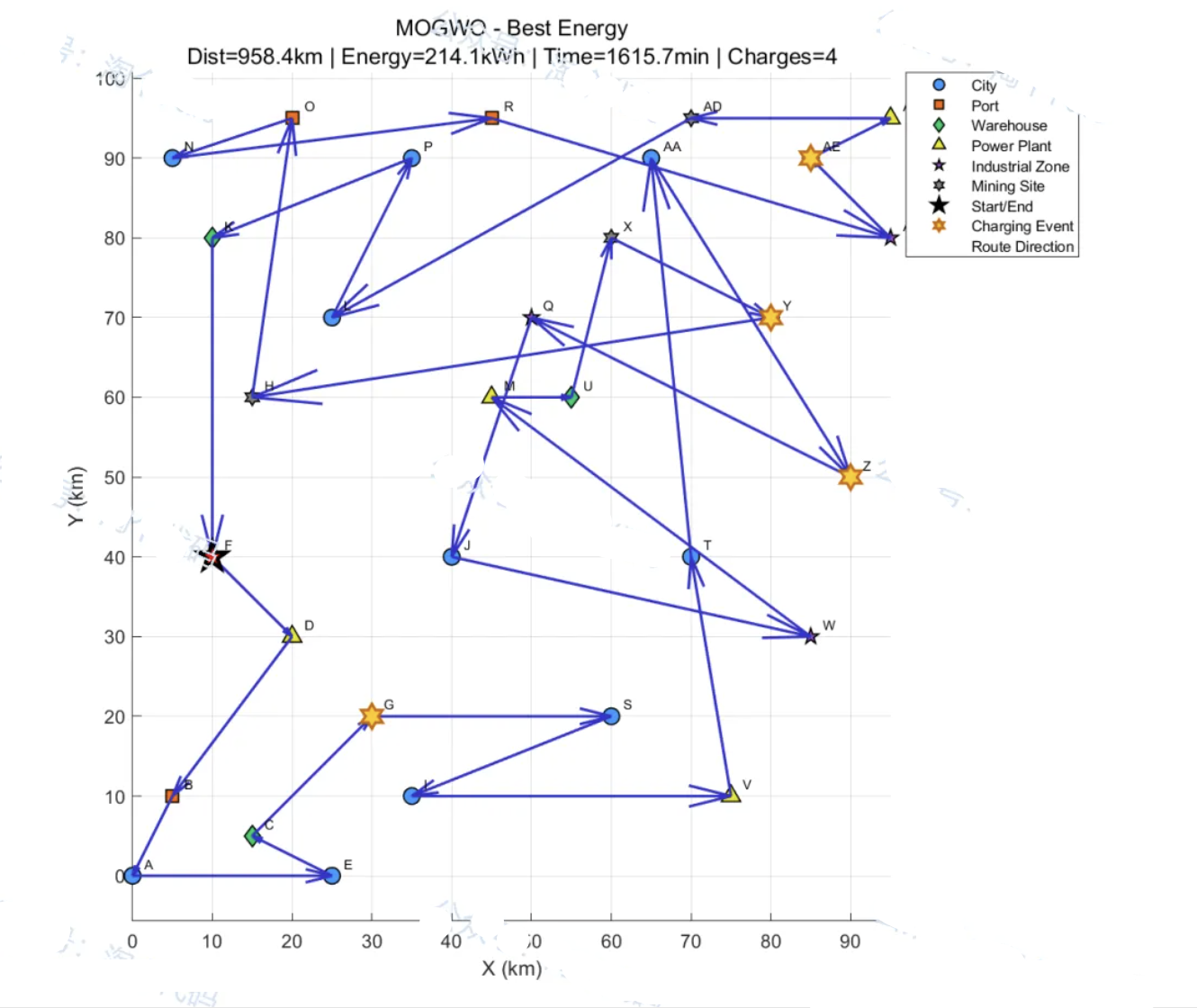
MOGWO结果:
MOPGA结果:
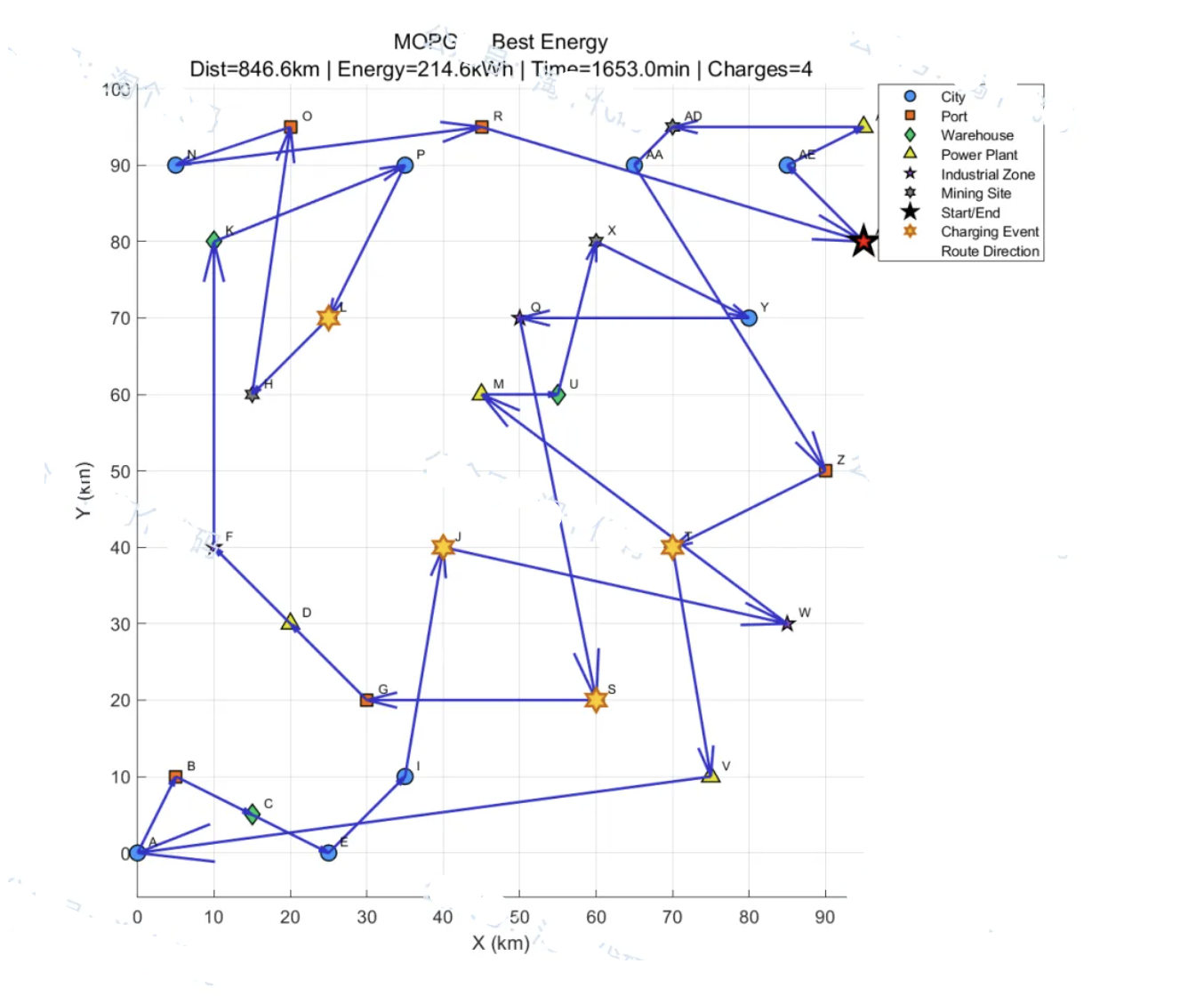
两个算法的对比:
🎉第三部分——参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈第四部分——本文完整资源下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python|数据|文档等完整资源获取


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献118条内容
已为社区贡献118条内容

所有评论(0)