基于 Gipps 模型的混合驾驶交通流仿真系统功能说明
自动驾驶与手动驾驶混合流仿真 matlab连续型元胞自动机交通流源代码 随机慢化,密度流量图,时空图,密度速度图 车头时距图等
1. 系统概述
本系统是一套基于 连续型元胞自动机(Continuous Cellular Automaton) 与 Gipps 跟驰模型 的单车道交通流仿真平台,专为研究 自动驾驶车辆(AV)与人工驾驶车辆(HV)混合交通环境 下的宏观交通特性而设计。系统支持周期性边界条件(封闭环形道路),能够模拟不同自动驾驶渗透率、不同随机慢化概率、不同车流密度等场景下的交通动态演化过程,并输出速度-密度基本图、通行能力提升率、车头间距波动、时空轨迹等关键指标。
自动驾驶与手动驾驶混合流仿真 matlab连续型元胞自动机交通流源代码 随机慢化,密度流量图,时空图,密度速度图 车头时距图等
系统采用模块化设计,核心逻辑清晰,具备良好的可扩展性,适用于交通工程、智能网联汽车、交通控制策略评估等领域的科研与教学。
2. 核心功能模块
2.1 车辆状态初始化(`startstate`)
系统在仿真开始时,根据指定的车辆总数、车道长度和车辆长度,均匀分布车辆位置,并为每辆车分配一个不超过最大速度且不超过前方安全间距的初始速度。该策略确保仿真从一个物理上合理、无碰撞的初始状态开始,避免瞬时拥堵或异常行为。
2.2 车辆跟驰与速度更新(`closedriverule`)
这是系统的核心演化模块,采用 Gipps 安全距离模型 计算每辆车在下一时刻的理论安全速度(vsafe),并结合以下规则更新实际速度:
- 加速阶段:若当前车头间距大于安全距离,则车辆尝试以最大加速度加速,但不超过最大速度、安全速度和前方空隙。
- 临界/减速阶段:若车头间距等于或小于安全距离,则根据前车状态(是否静止)进行保守减速,确保不发生碰撞。
- 差异化驾驶行为:
- 人工驾驶车辆(HV):采用较长的反应时间(如 1.5 秒),并引入 随机慢化机制(
slowrand),模拟人类驾驶的不确定性(如分心、保守驾驶)。 - 自动驾驶车辆(AV):采用极短的反应时间(如 0.1 秒),部分配置下可关闭或降低随机慢化概率,体现其感知-决策-执行链路的高效性与稳定性。
注:系统通过随机打乱车辆更新顺序(`randperm`)来避免更新顺序对仿真结果的系统性偏差。
2.3 随机慢化机制(`slowrand` / `aslowrand`)
为体现真实交通中的不确定性,系统为人工驾驶车辆引入 概率性减速行为。在每一步更新后,以一定概率(如 15%)将车速降低一个固定值(如 2 m/s² 对应的减速度效果)。自动驾驶车辆可配置更低的慢化概率或更小的减速度,反映其更高的驾驶一致性。
2.4 周期性边界处理
系统模拟一个 首尾相连的环形道路。当某辆车的位置超出车道长度时,系统将其“传送”回起点,并相应调整所有车辆的排序与状态,确保车辆编号与位置的一致性,维持仿真连续性。
2.5 数据采集与后处理(`closerun`)
主仿真脚本 closerun 负责:
- 遍历不同车辆总数(对应不同交通密度);
- 遍历不同自动驾驶车辆比例(0% ~ 100%);
- 运行足够长时间(如 10,000 步)使系统达到稳态;
- 仅采集最后 10% 的数据用于统计分析,避免初始瞬态影响;
- 计算并存储 平均速度(km/h)、交通密度(veh/km) 和 交通流量(veh/h)。
3. 仿真场景与输出分析
系统支持多种典型研究场景:
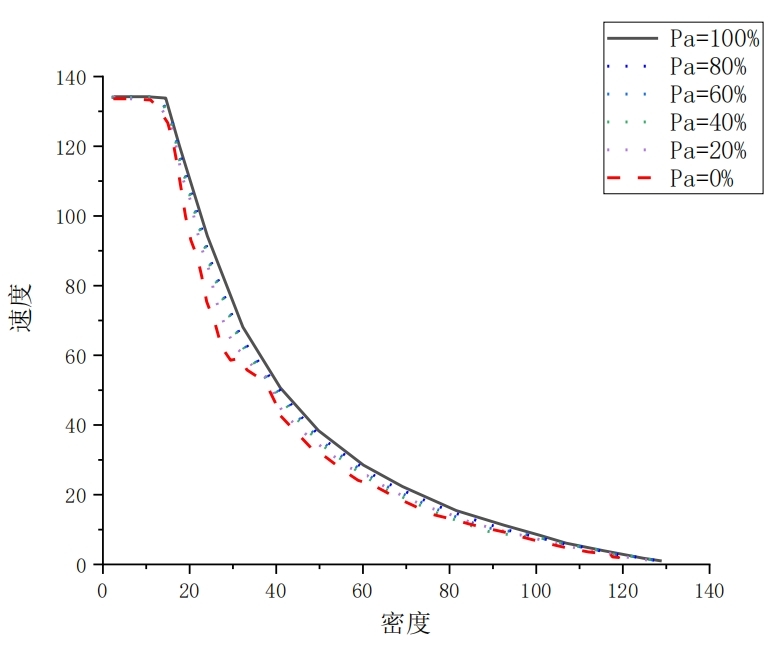
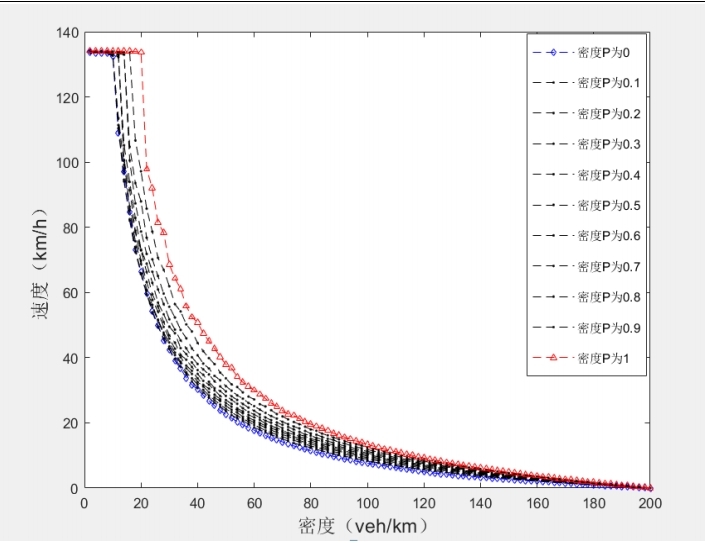
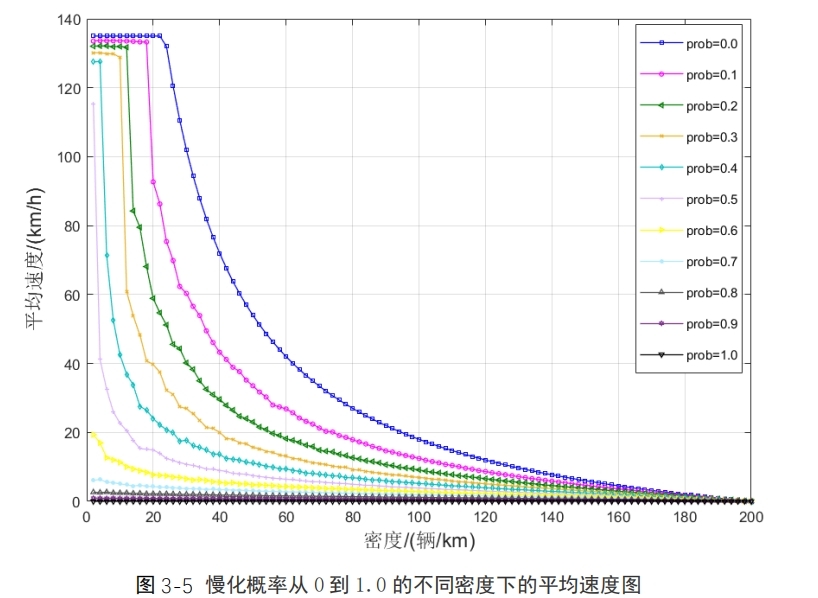
3.1 混合比例对基本图的影响
通过固定密度、改变 AV 渗透率,绘制多条 速度-密度曲线,直观展示自动驾驶对缓解拥堵、提升通行效率的作用。
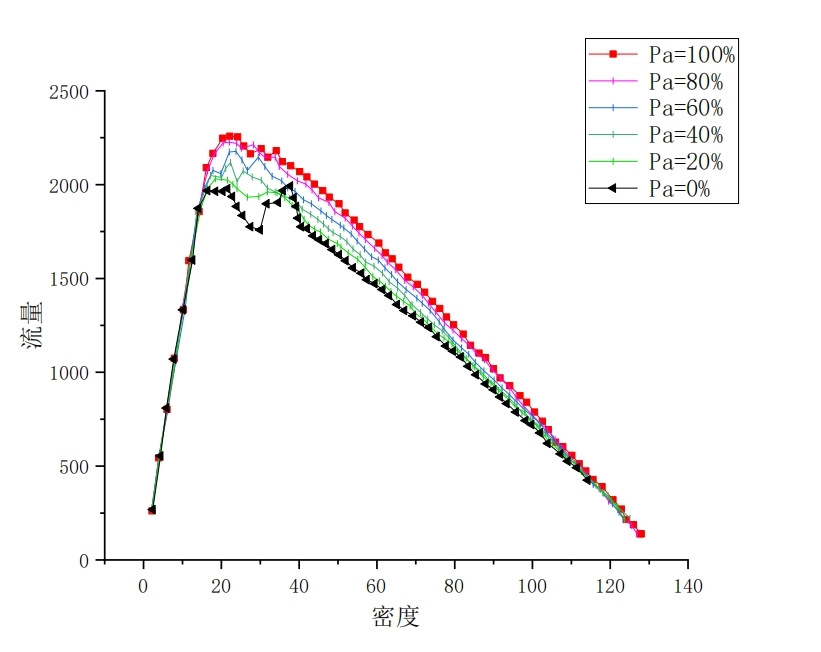
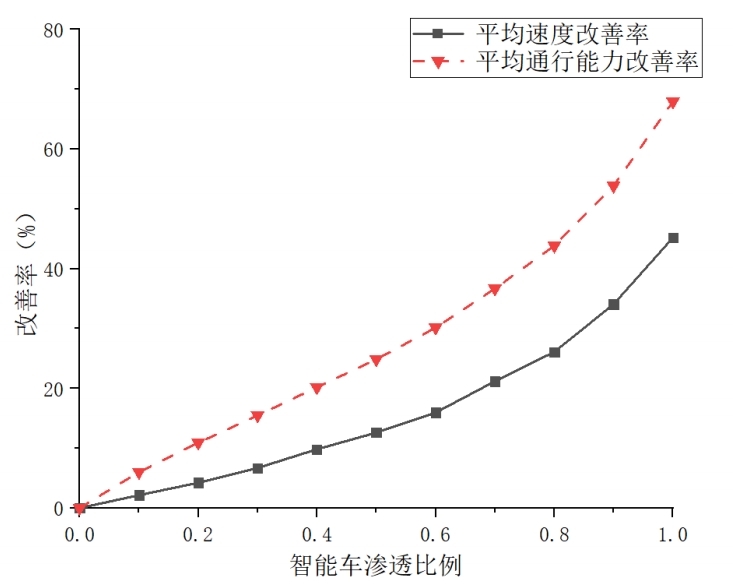
3.2 通行能力与速度提升率分析
计算不同 AV 比例下的平均流量与平均速度,并与纯人工驾驶基准对比,量化 通行能力提升百分比 和 平均速度提升百分比,为政策制定提供数据支撑。
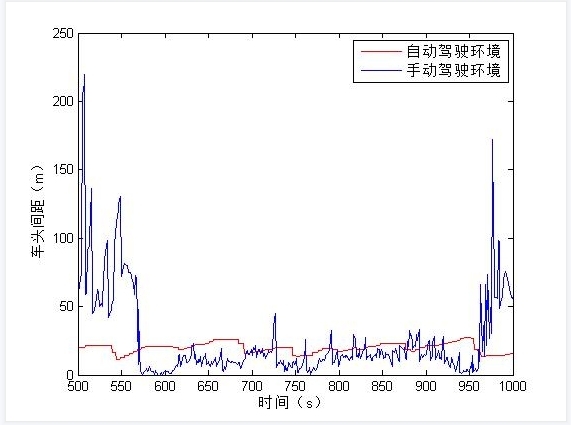
3.3 车头间距稳定性分析
记录特定车辆对在长时间仿真中的车头间距变化,对比 AV 与 HV 环境下的波动幅度,验证自动驾驶对 车流稳定性 的改善效果。
3.4 时空轨迹图(Time-Space Diagram)
以时间为横轴、空间位置为纵轴,绘制所有车辆的运动轨迹。密集的斜线代表自由流,水平或近水平线代表拥堵。该图可清晰展示 走走停停波(Stop-and-go waves) 的产生与传播,并对比 AV 对波动抑制的效果。
3.5 随机慢化敏感性分析
固定 AV 比例(如 100%),改变随机慢化概率,研究不确定性对全自动驾驶系统性能的影响边界。
4. 技术特点与优势
- 物理模型扎实:基于经典的 Gipps 跟驰模型,具有明确的物理意义和安全性保证。
- 行为差异化建模:通过反应时间和随机慢化参数区分 HV 与 AV,符合现实认知。
- 稳态数据采集:采用“预热-采集”策略,确保结果反映稳态交通特性。
- 模块化与可配置:各功能解耦,便于修改参数(如车辆长度、最大速度、加速度)或扩展新行为模型。
- 结果可视化丰富:支持基本图、提升率、时空图、间距波动等多种分析视角。
5. 应用价值
本系统可广泛应用于:
- 评估不同自动驾驶渗透率对城市/高速公路通行效率的影响;
- 为智能网联基础设施(如 V2X)部署提供量化依据;
- 研究混合交通流中的稳定性、安全性与能耗特性;
- 作为教学工具,帮助学生理解微观交通流模型与宏观交通现象的联系。
**总结**:该仿真平台以严谨的微观模型为基础,通过灵活的参数配置与全面的数据输出,为混合交通环境下的性能评估与策略优化提供了强有力的分析工具。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0



 已为社区贡献50条内容
已为社区贡献50条内容

所有评论(0)