电气工程|AI赋能直流减速电机驱动电路研究
导读:
在汉斯出版社《电气工程》期刊上,有文章在AI智能体的协助下成功设计并实现了一套基于嵌入式系统电路的直流减速电机驱动系统。
作者信息:
张梦达*, 王子健, 陈嘉兴, 徐 成, 杨学兵, 赵伟强, 马 发:宁夏大学电子与电气工程学院,宁夏 银川;蔺金元#:宁夏大学电子与电气工程学院,宁夏 银川;宁夏大学电工电子实验中心,宁夏 银川
论文详情
研究方法
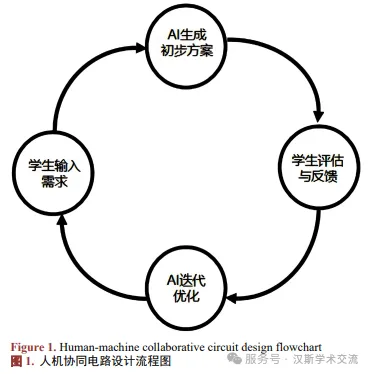
本项目采用团队自主研发的“电路智导”AI智能体,构建“学生–AI协同闭环”设计框架,如图1所示。
智能体构建与优化
本文选用智谱清言作为智能体开发平台,在其提供的GLMs、GLM4-air、GLM-z1、GLM-4.5、GLM-4.6 模型中,综合考量文本与代码生成能力及运行速度,最终采用GLM-4.5模型(非推理版)构建智能体。
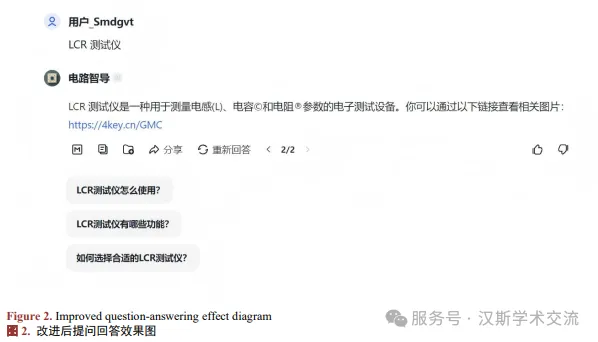
该智能体知识库采用“文本 + 图形”双库架构。文本知识库涵盖教材、本校实验指导书及自主归纳内容。
改进后的效果如图2所示。
AI赋能电路设计
全流程如图3所示。
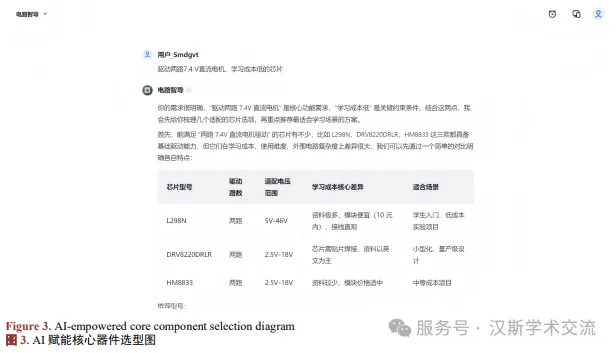
依托“电路智导”AI智能体,硬件设计流程摆脱寻找书籍范例之繁,转入“需求–AI搭建电路–学生仿真拍板”的极简循环。
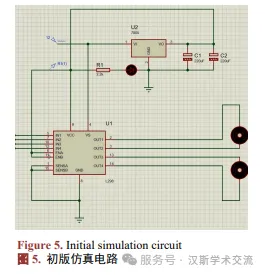
本设计在Proteus中按AI所述电路搭建仿真模型,实测换向、制动、PWM调速各工况与AI描述一致,验证了AI生成电路的正确性,仿真电路如图5。
电路智导”AI智能体可以辅助电路设计者进行代码的补全和错误检测,把软件模块开发从“手写每行代码、反复调参”的旧模式,升级为“需求–AI秒出代码框架–电路设计者验证、代码微调”的敏捷小循环。
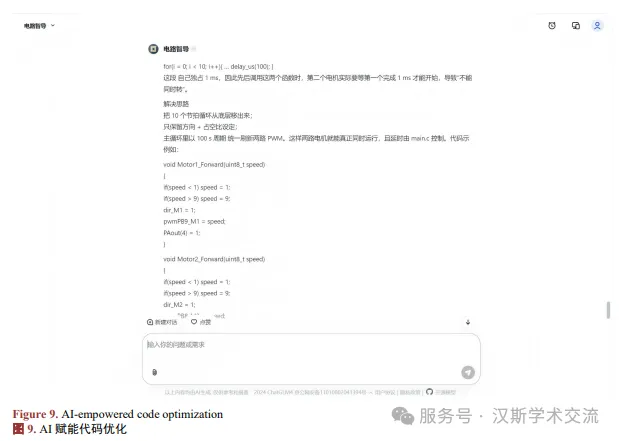
在Proteus中对STM32模型进行仿真时,观察到电机A与电机B在启停瞬态呈现显著不同步。随后将完整源码提交AI进行分析,AI定位根本原因:PWM节拍逻辑被嵌套于各电机驱动函数内部,致使双路占空比更新时刻随函数调用顺序天然错位,如图9所示。针对该隐患,本设计实施架构重构——将节拍产生机制彻底抽离,由主循环以固定周期统一刷新两路PWM占空比,底层驱动仅完成“置方向、写占空比”两项操作并立即返回,消除任何额外延迟。该重构使电机A与电机B在启动、制动、换向全过程中实现零时滞同步,显著提高了双电机的同步精度。
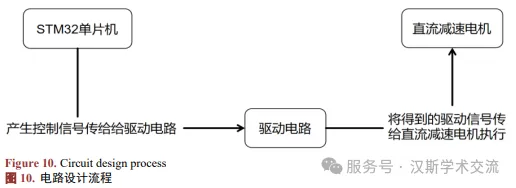
将已完成的软件模块和硬件模块在Proteus中按图10的开环控制系统进行电路连接与整合,构建出完整的控制系统;随后通过对电路整体的分析,既验证了电路的可行性,也进一步加深了对系统工作原理的理解。
结论
本研究在AI智能体的协助下成功设计并实现了一套基于嵌入式系统电路的直流减速电机驱动系统,实验证明该方案在控制精度、同步性与扩展能力上均表现出优势。相比传统模拟驱动,系统通过开环控制将速度波动压制在极小范围;独特的节拍剥离与统一刷新机制使两台电机启停完全同步,响应速度大幅加快。连续运行测试中,能够流畅完成前进、后退、转向、制动等多种动作。AI智能体在实验设计的运用,使得电路设计者不再孤立地面对直流减速电机驱动这一复杂任务,而是与AI学伴形成持续对话的闭环,有助于拓展设计思路,不断优化电路设计,有效提升了电路设计者的实践操作与问题解决能力;不仅将电路分析的理论知识应用于实际情境中,还有效提升了电路设计者调试和故障排除能力,最终成功实现直流减速电机的高效驱动。
原文链接:

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 6
6 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)