无人机拍矿区→AI找裂缝→几何量化:DRA-UNet采矿地裂缝检测与形态分析全流程
导读
地下采煤导致的地表裂缝是矿区地质灾害最直接的信号——它不仅破坏地面承载力,还会加速地表水下渗,引发滑坡和塌陷等次生灾害。然而,矿区地裂缝的自动检测面临独特困难:裂缝形态高度不规则(宽窄共存、分支弯曲)、背景干扰严重(砾石、植被、土壤纹理),且裂缝像素在图像中占比极小。
河南理工大学团队提出了一套从检测到分析的完整框架:首先用改进的 DRA-UNet从无人机正射影像中分割裂缝(D=双注意力机制、R=残差学习、A=空洞空间金字塔池化),然后通过骨架提取和几何参数量化,对裂缝的长度、宽度、面积和矩形度进行系统分析,最终在工作面尺度上揭示裂缝的空间分布规律。
在霍家兔煤矿无人机数据集上,DRA-UNet 的 F1 达到 71.60%、MIoU 达到 70.00%,在六种方法中最优。在公开的 Crack500 数据集上跨场景验证,F1 进一步达到 85.32%、MIoU 达到 83.69%。消融实验验证了每个模块的贡献,几何分析揭示了裂缝长度、宽度、面积的右偏分布特征,以及裂缝密度和复杂度在工作面边界附近显著增高的空间规律。
论文信息
-
标题:Automatic identification and feature analysis of Mining-Induced surface cracks using an improved DRA-UNet
-
作者:Weiwei Zhou, Youfeng Zou, Huabin Chai
-
机构:Henan Polytechnic University, Jiaozuo, China
-
发表:Scientific Reports, 2026, 16:6591
一、矿区地裂缝:比路面裂缝难检测得多
与道路或混凝土裂缝相比,采矿诱发的地表裂缝在检测上面临更大挑战:
-
形态复杂:主裂缝与次生裂缝共存,宽窄差异大,常伴随分支和弯曲
-
背景干扰强:矿区地表有砾石、植被、土壤纹理和阴影,容易产生误检
-
空间分布受地质控制:裂缝分布与地质构造、开采推进方向和下沉梯度密切相关
-
类别极度不平衡:裂缝像素在图像中的占比极小,背景占据绝对主导
现有研究多集中于提升分割精度,而将裂缝检测与几何量化分析、空间分布分析结合的工作仍然不足。本文的目标正是建立一个检测+量化+空间分析的完整框架。
二、DRA-UNet:在U-Net上叠加三个增强模块
基础架构
以经典 U-Net为基线。选择 U-Net 的理由是:编码器-解码器结构配合跳跃连接,适合保留细长裂缝的空间细节;参数量适中,适合有限的矿区数据集;模块化结构便于逐一评估每个改进的贡献。
三个核心改进
1. 残差学习(R — Basic Block)
在编码器和解码器的卷积层中引入 Basic Block 残差模块(即 ResNet 基本残差块:两层 3×3 卷积 + 跳跃连接),改善梯度流动,稳定深层网络训练。
2. 双注意力机制(D — DAM)
DAM 由 位置注意力模块(PAM)和 通道注意力模块(CAM)组成。在编码阶段,DAM 作用于高分辨率特征图,突出裂缝结构信息、抑制背景噪声;在解码阶段,DAM 利用局部和全局上下文细化上采样特征,使裂缝边界和纹理更清晰。
3. 空洞空间金字塔池化(A — ASPP)
在瓶颈层嵌入 ASPP 模块,使用扩张率为 1、2、4、6 的空洞卷积加上全局平均池化,从多个感受野尺度提取语义特征,增强对不同宽度和复杂形态裂缝的识别能力。
三个模块的协作逻辑是:DAM 提供更干净、更聚焦的特征输入 → ASPP 在此基础上提取多尺度上下文信息 → 残差连接保证信息在深层网络中的高效流动。
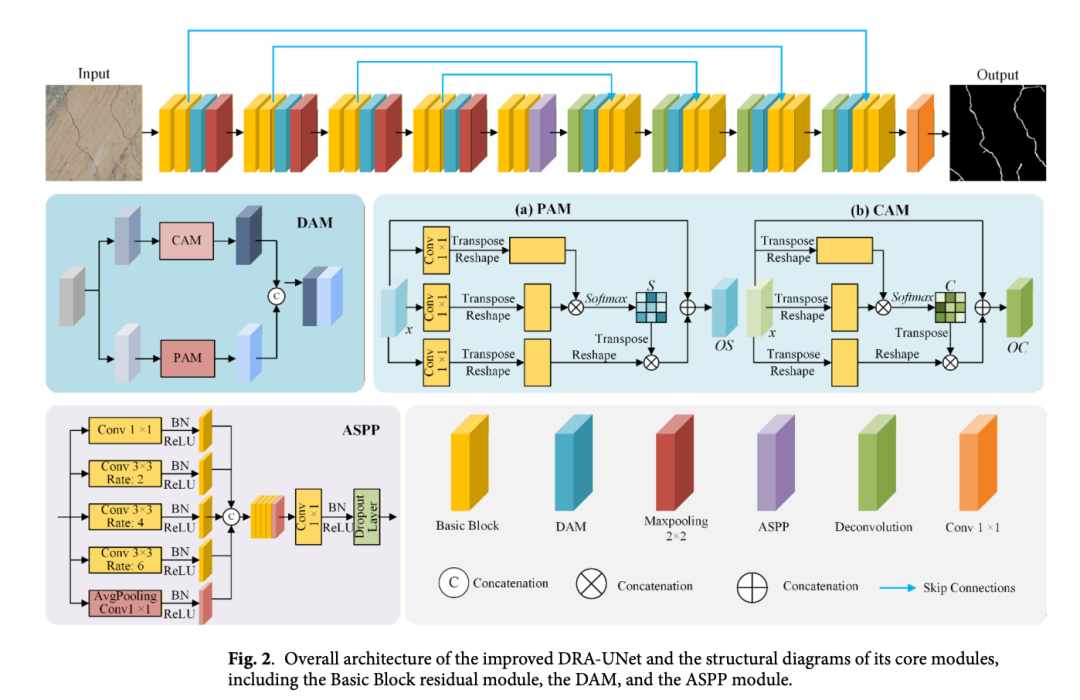
图片来源于原论文
混合损失函数
针对裂缝像素占比极小的特点,设计了三组分混合损失:
|
组分 |
权重 |
作用 |
|---|---|---|
|
Focal Tversky Loss |
0.6 |
加强对漏检(FN)的惩罚,聚焦难以检测的细长裂缝 |
|
BCEWithLogitsLoss |
0.3 |
稳定像素级二分类概率优化 |
|
Edge Consistency Loss |
0.1 |
基于 Sobel 梯度算子约束预测边界与真实边界的一致性 |
训练配置
|
参数 |
设置 |
|---|---|
|
框架 |
PyTorch |
|
优化器 |
AdamW |
|
学习率 |
1×10⁻⁴ |
|
批大小 |
8 |
|
输入尺寸 |
256×256 像素 |
|
最大轮次 |
200 |
|
数据增强 |
亮度/对比度调整、水平/垂直翻转、90°/180°旋转 |
三、霍家兔煤矿数据集与实验结果
研究区域与数据集
霍家兔煤矿位于陕西省榆林市大柳塔镇,处于陕西与内蒙古交界、毛乌素沙漠南部。研究选取的工作面走向长度约 2700 m,倾向长度约 300 m,开采 2-2 号煤层(平均埋深约 145 m,平均厚度约 4.2 m)。
无人机影像由 DJI M300-RTK搭载 Zenmuse H20T传感器(集成广角相机、热成像和激光测距)采集,地面分辨率 2.76 cm。影像经 Pix4DMapper 处理后生成正射影像,裁切为 256×256 像素块(25%重叠),共生成 6000 个样本,按 8:1:1 划分训练/验证/测试集。标注采用人工目视解释后二值化(背景=0,裂缝=255)。
与五种方法的性能对比
|
模型 |
Pr(%) |
Re(%) |
F1(%) |
MIoU(%) |
|---|---|---|---|---|
|
DeepLabV3+ |
71.21 |
69.12 |
70.15 |
65.10 |
|
SegNet |
63.55 |
68.46 |
65.91 |
63.59 |
|
PSPNet |
64.76 |
68.41 |
66.53 |
67.57 |
|
SegFormer |
67.01 |
69.63 |
68.29 |
69.25 |
|
FastSCNN |
62.90 |
67.08 |
64.92 |
66.96 |
| DRA-UNet | 71.10 | 72.20 | 71.60 | 70.00 |
DRA-UNet 的 Precision 略低于 DeepLabV3+(71.10% vs 71.21%),但 Recall 在所有模型中最高(72.20%),说明其对裂缝的捕获能力更强。F1 和 MIoU 均为最优,分别比次优方法高出 +1.45(vs DeepLabV3+ 的 70.15%)和 +0.75(vs SegFormer 的 69.25%)。
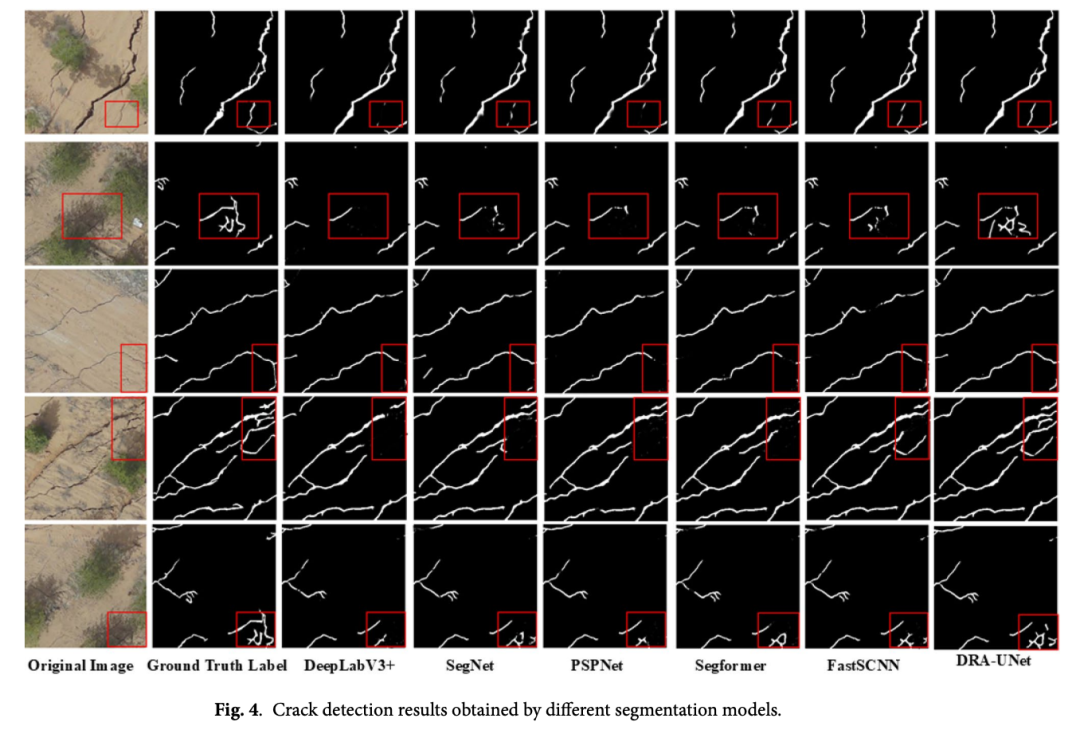
图片来源于原论文
Crack500 跨场景验证
为验证泛化能力,在公开的 Crack500 数据集(路面裂缝)上测试:
|
模型 |
Pr(%) |
Re(%) |
F1(%) |
MIoU(%) |
|---|---|---|---|---|
|
DeepLabV3+ |
80.12 |
85.13 |
82.55 |
81.84 |
|
SegNet |
81.28 |
86.96 |
84.02 |
80.64 |
|
PSPNet |
80.55 |
83.89 |
82.19 |
83.01 |
|
SegFormer |
82.21 |
83.23 |
82.72 |
83.26 |
|
FastSCNN |
83.85 |
85.49 |
84.66 |
82.54 |
| DRA-UNet |
83.12 |
87.68 | 85.32 | 83.69 |
DRA-UNet 的 MIoU 最高(83.69%),Recall 和 F1 同样最优。Precision 略低于 FastSCNN(83.12% vs 83.85%),但综合分割质量最佳。
四、消融实验:三个模块各贡献多少?
在矿区无人机数据集上,对残差模块(ResNet)、双注意力机制(DAM)和 ASPP 三个组件进行消融实验:
|
配置 |
Pr(%) |
Re(%) |
F1(%) |
MIoU(%) |
|---|---|---|---|---|
|
U-Net(基线) |
65.52 |
67.43 |
66.46 |
65.90 |
|
+ ResNet |
68.46 |
68.97 |
68.71 |
66.86 |
|
+ DAM |
66.57 |
67.56 |
67.06 |
66.05 |
|
+ ASPP |
66.78 |
67.44 |
67.11 |
66.88 |
|
+ ResNet + DAM |
68.90 |
70.08 |
69.48 |
68.23 |
|
+ ResNet + ASPP |
68.98 |
69.53 |
69.25 |
67.95 |
|
+ DAM + ASPP |
67.46 |
67.58 |
67.52 |
67.44 |
| + ResNet + DAM + ASPP | 71.10 | 72.20 | 71.60 | 70.00 |
几个关键发现:
-
残差模块贡献最大:单独加入 ResNet,F1 从 66.46% 提升到 68.71%(+2.25),而 DAM 和 ASPP 单独加入的提升分别仅为 +0.60 和 +0.65
-
DAM 和 ASPP 需要残差基础才能发挥最大作用:DAM+ASPP 组合(无 ResNet)F1 仅为 67.52%,但 ResNet+DAM+ASPP 三者联合达到 71.60%,说明残差连接为注意力和多尺度模块提供了更优质的特征基础
-
三模块联合的增益大于任意两两组合:最终 F1(71.60%)比最优两模块组合 ResNet+DAM(69.48%)还高 +2.12,呈现协同增益
五、总结与思考
本文提出了面向矿区地表裂缝的完整框架:DRA-UNet 语义分割(F1=71.60%/MIoU=70.00%)→ 骨架提取与几何量化 → 工作面尺度空间分析。几何分析揭示裂缝长度、宽度和面积均呈右偏长尾分布(均值:长度 2.12 m,宽度 7.73 cm),矩形度随裂缝长度增加而下降;空间分析表明工作面边界附近裂缝密度和复杂度显著增高,内部裂缝呈特征性的"C形"张开模式。
在此基础上,有几点值得进一步思考:
-
检测-量化-空间分析的三层框架是本文的核心贡献。多数裂缝检测论文止步于分割精度,而本文将骨架提取和几何参数量化纳入流程,使检测结果能直接服务于灾害评估和维护决策——这种"从像素到工程"的思路值得参考。
-
单矿区数据存在局限。6000 个样本均来自霍家兔煤矿,属于半干旱环境。Crack500 的跨场景验证虽然表现不错(MIoU=83.69%),但路面裂缝与采矿地裂缝在形态和背景上存在本质差异,跨域适用性仍需进一步验证。
-
论文定位为离线分析工具,未报告推理速度和计算资源需求。对于需要快速响应的矿区巡检场景,如何部署到无人机机载平台或边缘设备是后续需要解决的问题。
-

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 12
12 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)