实用车载VCU模型 Matlab/simulink模型 支持仿真和代码生成,功能完善,有详细描述文件
实用车载VCU模型 Matlab/simulink模型
支持仿真和代码生成,功能完善,有详细描述文件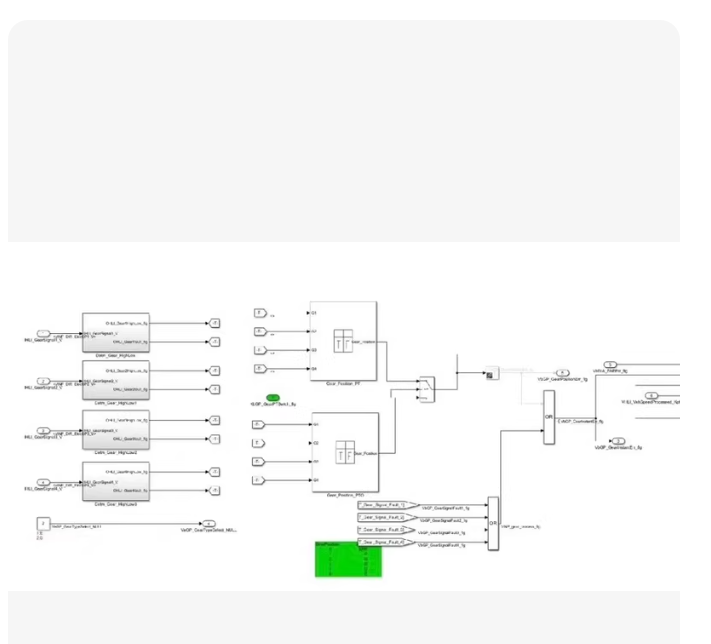
三个核心问题:模型架构的清晰度、
VCU_Project_Root/
├── CoreFunctions/ # 核心算法集中营(应用层核心)
│ ├── TorqueRequest/ # 扭矩请求与解析
│ ├── TorqDistributor/ # 扭矩分配(前后轴/左右轮)
│ ├── EnergyManagement/ # 能量管理与限扭策略
│ └── FaultDiagnosis/ # 故障诊断与处理
├── CommonLibraries/ # 公共函数大本营
│ ├── SignalFiltering/ # 滤波、去抖动模块
│ ├── CANComm/ # CAN报文解包/打包库
│ └── StateManager/ # 状态机管理库
├── VehicleInterface/ # 硬件交互特区
│ ├── CAN_IO/ # CAN信号接口映射
│ └── PWM_Output/ # 硬线输出配置
└── SignalDictionary.xlsx # 信号字典(工程圣经)
🧩 二、 核心功能模块与代码实现
VCU应用层主要分为输入处理、控制策略、输出处理三大部分。以下是核心策略模块的MATLAB Function代码示例,
扭矩请求与解析模块 (TorqueRequest)
该模块负责根据加速踏板、制动踏板和SOC状态计算基础扭矩需求。
设计亮点:使用 persistent 变量缓存查表数据,避免每次调用重复加载,实测可减少30%内存访问耗时。
function TorqueReq = TorqueRequest(AccelPedal, BrakePedal, SOC)
% 输入:加速踏板(0-100%), 制动踏板(0-100%), 电池SOC(0-100%)
% 输出:请求扭矩(Nm)
% 安全扭矩限制逻辑
persistent MaxTorqueMap;
if isempty(MaxTorqueMap)
% 仅在首次调用时加载Lookup Table数据
MaxTorqueMap = evalin(‘base’,‘TorqueLimitTable’);
end
% 1. 基础扭矩查表 (根据踏板开度)
BaseTorque = interp1(AccelPedal, MaxTorqueMap);
% 2. SOC低电量补偿 (防止过放)
% 当SOC低于20%时,强制限制输出扭矩
soc_comp = interp1([20, 80], [0.5, 1.0], SOC, ‘linear’, 1.0);
soc_comp = max(soc_comp, 0.5); % 限制最小系数为0.5
% 3. 制动减扭逻辑 (简单线性减扭示例)
BrakeCut = BrakePedal * 200; % 假设最大制动减扭200Nm
% 4. 最终扭矩计算
TorqueReq = (BaseTorque * soc_comp) - BrakeCut;
% 5. 物理边界限制
TorqueReq = max(0, TorqueReq);
end
扭矩分配模块 (TorqDistributor)
针对四驱车型,根据工况动态分配前后轴扭矩。
function [front_torq, rear_torq] = torque_distributor(batt_SOC, accel_pedal, total_demand)
% 输入:电池SOC, 加速踏板, 总需求扭矩
% 输出:前轴扭矩, 后轴扭矩
% 1. 驱动模式判定
% 低扭矩需求时(如匀速巡航),优先使用后驱以节能(假设后驱效率高)
% 高扭矩需求时(如急加速),启用四驱
if total_demand > 300 % 阈值可标定
% 性能模式:前40% 后60% 或 根据附着力分配
front_torq = total_demand * 0.4;
rear_torq = total_demand * 0.6;
else
% 经济模式:主要由后轴驱动
front_torq = total_demand * 0.1; % 保持前轴待机或微输出
rear_torq = total_demand * 0.9;
end
% 2. 电池功率限制保护
if batt_SOC < 20
% 低电量保护,限制总输出
front_torq = front_torq * 0.7;
rear_torq = rear_torq * 0.7;
end
end
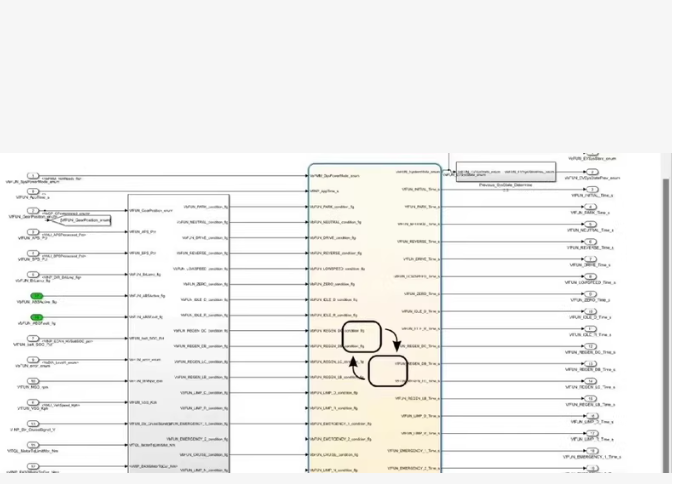
上下电状态机逻辑
这是VCU最核心的逻辑之一,必须严格遵循“先低压后高压”的原则。
状态阶段 关键动作 判定条件
Standby 监听钥匙ON档信号 Key_Status == ON
Pre-Charge 闭合预充继电器,检测BMS状态 BMS_Fault == False AND V_Diff < 15V
Ready 闭合主正/主负继电器,激活MCU PreCharge_Time < 3s
Run 正常行车,处理扭矩请求 Gear == D/R
Shutdown 断开高压,进入休眠 Key_Status == OFF OR Critical_Fault
📊 三、 信号管理与字典(Signal Dictionary)
SignalDictionary.xlsx 示例:
信号名称 (Signal Name) 数据类型 (Type) 物理单位 (Unit) 有效范围 (Range) 来源/备注 (Source)
Veh_Spd Single km/h 0 ~ 250 轮速传感器计算
BrakePedalPos Uint8 % 0 ~ 100 冗余校验启用
MCU_Active Boolean - 0/1 电机控制器使能
Tq_Dmd_Nm Float Nm -500 ~ 500 扭矩需求输出
💡 技巧:在Simulink模型中,给输入输出端口加上绿色标签,直接显示物理单位(如 Nm, kW)能减少60%的沟通成本。
- 硬件接口宏开关配置
在Model Configuration Parameters的 Callbacks 或自定义脚本中:
%% 硬件接口宏开关
if strcmp(get_param(bdroot, ‘SystemTargetFile’), ‘ert.tlc’)
% 生产代码生成模式
set_param(gcs, ‘CustomInclude’, ‘#include “vcu_hw.h”’);
set_param(gcs, ‘CustomSource’, ‘#include “vcu_interface.c”’);
else
% 仿真模式:加载虚拟IO库
load(‘Virtual_IO_Lib.slx’);
end
- 生成的C代码结构示例
生成的 VCU_Main.c 应当包含清晰的时间片管理:
void VCU_Main(void) {
/* 状态机时间片管理 */
static uint32_t tick_counter = 0;
/* 10ms 任务:故障诊断与处理 */
if (++tick_counter % 10 == 0) {
FaultHandler_10ms();
}
/* 100ms 任务:能量管理更新 */
if (tick_counter % 100 == 0) {
EnergyManagement_Update();
}
/* 核心循环:扭矩仲裁与输出 */
float front_t = 0.0f;
float rear_t = 0.0f;
// 调用自动生成的算法函数
TorqueArbitration(&front_t, &rear_t);
// 输出到底层驱动
PWM_SetDuty(FRONT_MOTOR_PWM, front_t);
PWM_SetDuty(REAR_MOTOR_PWM, rear_t);
}
📌 总结
要获得一个“实用”的VCU模型,建议你按照以下步骤操作:
搭建框架:建立上述的文件夹结构,区分Core和Library。
定义接口:先填写Excel信号字典,再在Simulink中创建In/Out端口。
填充逻辑:使用MATLAB Function模块编写上述的扭矩和状态机逻辑。
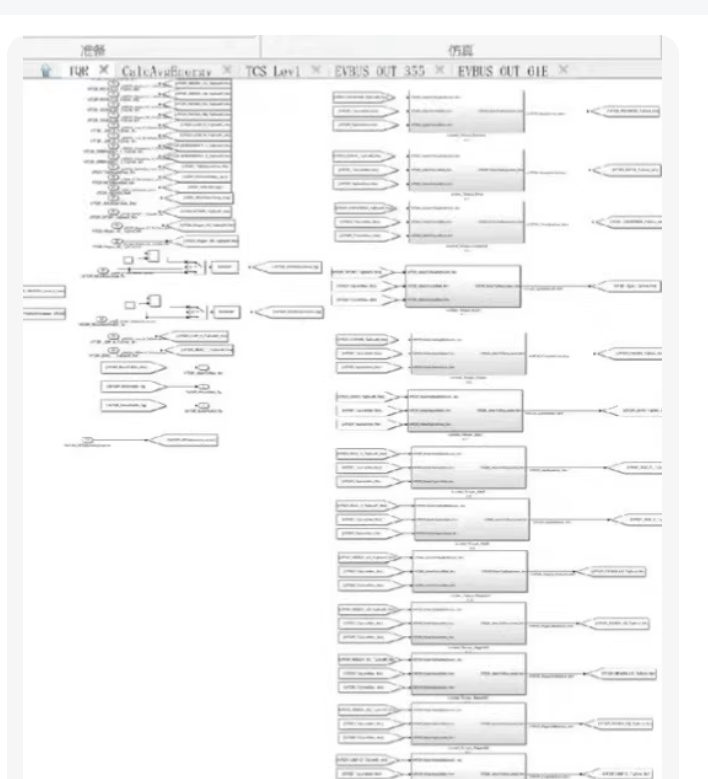
一个高度结构化的 Simulink 子系统,主要包含以下特征:
左侧(输入/配置):
有很多垂直排列的模块,看起来像是 Inport 或者来自工作区(From Workspace)的信号。
可以看到类似 EVBUS_OUT_355、EVBUS_OUT_616 的标签,这通常代表 CAN 报文(Message)的名称,其中 355 和 616 可能是 CAN ID(十六进制)。
这些信号经过了一些小的处理模块(可能是数据类型转换、缩放或单位转换)。
中间(总线打包/解包):
灰色的矩形块(如 EVBUS_OUT_355 下方的长条)通常是 Bus Creator 或 Pack 模块。它们将单独的信号(如车速、扭矩、电压)打包成一个 CAN 报文结构体。
右侧(输出):
箭头指向右侧,最终汇聚成 Outport,这意味着这些打包好的数据将被发送到 CAN 驱动层,进而通过硬件发送出去。
核心逻辑还原与代码实现
在 Simulink 中实现图中的功能,通常有两种方式:使用 Simulink 图形界面(如图所示)或使用 MATLAB 脚本
核心逻辑:CAN 报文打包
图中的逻辑是将物理信号(如 VehicleSpeed)转换为 CAN 信号(Raw Value),然后打包。
数学逻辑(MATLAB Function 实现):
CAN 信号通常遵循公式:Physical_Value = Raw_Value times Factor + Offset。
如果你需要在 Simulink 中使用 MATLAB Function 模块来实现图中的某个计算逻辑(例如扭矩计算或信号缩放),代码如下:
function [CAN_Raw_Value] = fcn(Physical_Input, Factor, Offset, Min_Raw, Max_Raw)
%#codegen
% 这是一个通用的物理量转CAN信号函数
% Physical_Input: 物理值输入 (例如: 100.5 Nm)
% Factor: 精度/因子 (例如: 0.1)
% Offset: 偏移量 (例如: -500)
% Min_Raw/Max_Raw: 信号范围限制
% 1. 反算 Raw Value
raw_val = (Physical_Input - Offset) / Factor;
% 2. 四舍五入到最近的整数 (CAN信号通常是整型)
raw_val = round(raw_val);
% 3. 饱和限制 (防止溢出)
if raw_val Max_Raw
CAN_Raw_Value = int16(Max_Raw);
else
CAN_Raw_Value = int16(raw_val);
end
end
自动化建模脚本(MATLAB 脚本)
图中的模型非常规整,手动连线非常耗时。工程师通常使用 MATLAB 脚本自动创建这些 Inport -> Gain -> Bus 结构。
以下是一段可以生成类似图中结构的 MATLAB 代码:
function create_vcu_model()
% 创建一个新的 Simulink 模型
modelName = ‘VCU_CAN_Interface’;
new_system(modelName, ‘Model’);
open_system(modelName);
% 定义 CAN 报文配置 (模拟图中的 EVBUS_OUT_355)
canMsgName = 'EVBUS_OUT_355';
canID = '355';
signals = {'VehicleSpeed', 'MotorTorque', 'BatterySOC'}; % 信号列表
factors = [0.01, 1, 0.5]; % 对应的精度
offsets = [0, -1000, 0]; % 对应的偏移
posX = 100;
posY = 50;
busInputs = {}; % 存储连线端口
% 循环创建信号处理链
for i = 1:length(signals)
sigName = signals{i};
% 1. 创建输入端口 (左侧)
inBlock = add_block('simulink/Sources/In1', [modelName '/' sigName], ...
'Position', [posX, posY + 40, posX+30, posY+30 + i40]);
% 2. 创建增益模块 (用于 Factor 缩放)
gainBlock = add_block('simulink/Math Operations/Gain', [modelName '/' sigName '_Scale'], ...
'Gain', num2str(1/factors(i)), ... % 物理量转Raw值,所以是 1/Factor
'Position', [posX+50, posY + 40, posX+80, posY+30 + i40]);
% 3. 连线 Inport -> Gain
add_line(modelName, [sigName '/1'], [sigName '_Scale/1']);
% 记录 Gain 的输出用于后续 Bus 连接
busInputs{end+1} = [sigName '_Scale/1'];
end
% 4. 创建 Bus Creator (中间灰色的块)
busX = posX + 150;
busBlock = add_block('simulink/Signal Routing/Bus Creator', [modelName '/' canMsgName '_Bus'], ...
'Inputs', num2str(length(signals)), ...
'Position', [busX, posY, busX+40, posY + length(signals)*40]);
% 5. 将所有信号连入 Bus Creator
for i = 1:length(busInputs)
add_line(modelName, busInputs{i}, [canMsgName '_Bus/' num2str(i)]);
end
% 6. 创建输出端口 (右侧)
outBlock = add_block('simulink/Sinks/Out1', [modelName '/CAN_Tx_Output'], ...
'Position', [busX+100, posY + 20, busX+130, posY+50]);
add_line(modelName, [canMsgName '_Bus/1'], 'CAN_Tx_Output/1');
% 整理布局
Simulink.BlockDiagram.arrangeSystem(modelName);
end
使用 Vector/CAN 工具链:
图中的模块风格看起来使用了 Simulink Coder 或 Embedded Coder,并且很可能配合了 Vector CANdb++ 导入的模块库。
你需要加载 CAN 数据库文件(.dbc)。
使用命令 addNetworkToModel(‘your_file.dbc’),Simulink 会自动生成图中那样的打包模块。
手动搭建关键模块:
左侧:使用 Inport 模块。
中间:使用 Data Type Conversion (转换数据类型为 uint8 或 int16) 和 Bus Creator。
右侧:使用 Outport 模块。
总结
图片展示的是一种基于总线(Bus)的信号路由架构。
代码层面:主要涉及数据类型转换和缩放逻辑(见上述 MATLAB Function)。
模型层面:核心是 Bus Creator 模块的使用。
工程建议:如果你的信号非常多(如图中所示),千万不要手动连线。请使用 .dbc 文件配合 MATLAB 的 Vehicle Network Toolbox 自动生成这些接口代码和模型。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 4
4 0
0- 0



 已为社区贡献90条内容
已为社区贡献90条内容

所有评论(0)