技术深解|Kinova为何它是机械臂操作、力控与具身智能的首选
在具身智能、双臂操作、VLM‑VLA 模型、力控学习全面爆发的今天,硬件平台的选择直接决定研究落地与算法复现效果。无论是机器人顶会论文,还是高校实验室项目,Kinova 机械臂的出现频率居高不下。它不拼极端负载、不卷极限速度,凭借7轴冗余、全域力控、内置控制器、高度开源四大核心优势,成为精密操作与前沿研究的事实标准硬件。
不同于传统工业机械臂“重负载、高速度、封闭化”的逻辑,Kinova 从诞生之初就走出差异化协作路线,核心价值在于“以人为中心”,兼顾安全、灵活、开放与可扩展性,这也是它长期占据科研与高端协作领域领先地位的根本原因。
一、从助残出发
Kinova Robotics 2006年成立于加拿大,初心并非服务工业流水线,而是为肢体障碍人士、轮椅使用者提供生活辅助,帮助他们重获独立生活能力。这一初心,塑造了其独特产品基因,与传统工业机械臂划清界限。
早期 Jaco 辅助臂作为轮椅用户的“第三只手”,以“安全、轻便、易用”为核心,采用轻量化材料、简单操作方式与全关节力控系统,奠定了Kinova 核心技术基因:安全优先、极致轻量化、7轴冗余构型、全关节力控、高度开源。
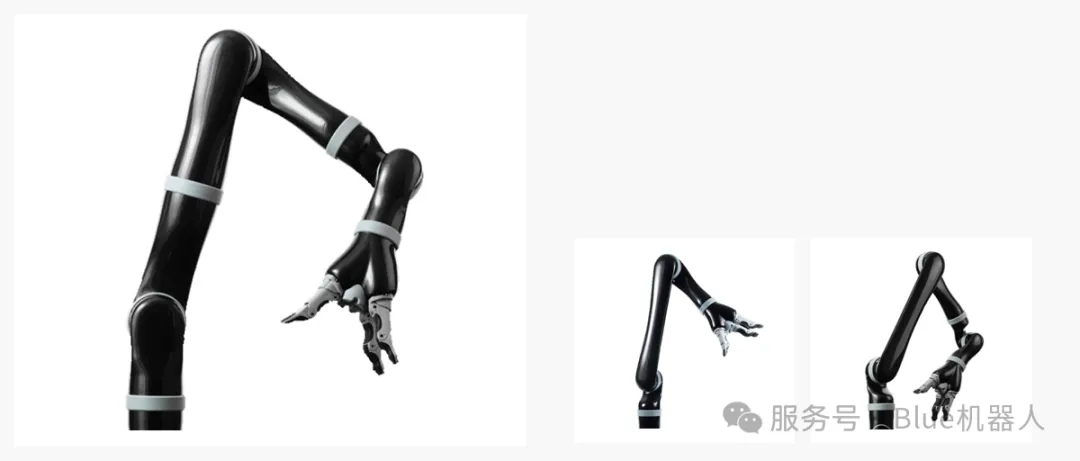
这种“以人为中心”的设计,让Kinova 区别于传统工业臂——后者侧重高效重载,需安全围栏隔离;前者侧重安全柔顺,可与人近距离协同,逐渐聚焦科研、医疗、移动操作等高端场景,成为不可替代的硬件平台。
随着机器人技术向具身智能、双臂协同发展,Kinova 的产品基因恰好契合前沿需求:7轴冗余解决避障与协同问题,全关节力控保障安全与精密交互,高度开源降低开发门槛,轻量化适配多场景。如今其产品线覆盖多系列、多场景,但核心基因始终未变,成为科研与医疗领域的核心支撑。
二、硬件架构
硬件是机器人性能的基础,也是算法落地的前提。Kinova 为协作与研究而生的硬件架构,无冗余堆砌,经工程实践验证,其中四大核心设计筑牢科研平台基础,也是其核心竞争力所在。
-
7自由度冗余构型:传统工业机械臂多为6轴,难以应对复杂避障与双臂协同。Kinova主流产品采用7自由度冗余构型,复刻人类手臂运动结构,可在末端位姿不变时调整臂身姿态,实现避障与奇异点回避,适配复杂非结构环境;双臂协同时可优化姿态、避免自碰撞,是SkillVLA等研究的硬件前提;同时支持零空间优化,延长使用寿命并保证运动平滑。
-
全关节扭矩传感:Kinova 中高端系列采用全关节内置扭矩传感,实现全域力控。碰撞响应<50ms,无需安全围栏;支持力矩、阻抗、力位混合控制,适配不同任务;力控精度达±0.3N,满足精密操作与医疗需求;支持无传感器拖拽示教,降低操作与调试门槛。
-
集成式控制器:传统工业臂需外置控制柜,体积大、布线复杂,难以适配移动场景。Kinova 将控制器、驱动、电源管理集成于臂身,实现无外置控制柜设计。Gen3 7DoF自重仅8.2kg,单人可安装;24VDC低压供电,平均功耗36W,可电池驱动;布线极简,可无缝搭载AMR底盘、轮椅等,适配移动操作与具身智能场景。
-
1kHz实时闭环:上层算法的稳定运行依赖底层实时性,Kinova 1kHz闭环控制,每1ms完成状态检测与指令调整,运动平滑无抖动;重复定位精度±0.5mm,保障实验一致性;末端预留标准化接口,可快速对接视觉、夹爪、力传感器,降低实验搭建成本。

三、软件生态:开源友好,开箱即可跑算法
硬件决定下限,软件决定上限。Kinova 高度开源、友好易用的软件生态,在专业机械臂中处于第一梯队,真正实现“开箱即可跑算法”,大幅提升科研效率。
其软件生态以Kortex框架为核心,搭配ROS/ROS 2原生支持与多层级控制模式,覆盖从入门到科研的全场景需求,适配不同层次用户。
-
Kortex API:统一跨平台接口,支持C++、Python、MATLAB三种主流语言,适配不同研究者习惯;提供Web图形化界面,无需代码即可完成监控、配置与轨迹录制;配套仿真环境与例程,助力研究者快速搭建实验方案。
-
ROS/ROS 2原生支持:多数前沿研究基于ROS/ROS 2开发,Kinova 提供官方驱动包,开箱即可对接,适配MoveIt规划器、Gazebo仿真等工具;与顶会开源代码高度兼容,可快速复现实验结果,降低适配成本。
-
多层级控制模式:基础模式支持拖拽示教、图形化编程,适配零基础用户;工程模式支持轨迹、速度环控制,适配自动化任务;科研模式开放底层接口,支持自定义算法与控制策略,满足前沿研究个性化需求。
四、性能与场景
Kinova 精准聚焦轻型协作、精密交互、科研与医疗等高端场景,客观呈现能力边界,不夸大、不虚构,务实适配真实需求。以科研常用的Kinova Gen3 7DoF为例,其核心性能参数贴合科研需求:最大伸展902mm,中臂展持续负载4kg,全臂展2kg,最大末端速度50cm/s,防护等级IP33,支持Ethernet/USB通信,24VDC低压供电,兼顾性能与实用性。

Kinova 核心适配四大场景,充分发挥软硬件优势:
-
双臂操作与技能组合研究:7轴冗余、全关节力控与集成设计,使其成为双臂协同研究的理想平台,可完成复杂协同任务,适配SkillVLA等前沿研究,是顶会双臂论文的首选硬件。
-
具身智能与VLA模型落地:力觉与视觉感知兼备,开源生态支持快速部署学习算法,轻量化设计适配移动机器人,成为具身智能与VLA模型的理想载体。
-
医疗康复领域:安全柔顺、轻量小型,适配康复病房与家庭场景,可完成康复训练、轮椅辅助等任务,是医疗康复机器人的核心硬件。
-
移动操作场景:无外置控制柜、低功耗、轻量化,可完美适配AMR底盘,实现移动抓取、巡检等任务,是全球移动操作项目的常用选择。

需明确,Kinova 不适合高负载、高速连续工业作业,高粉尘恶劣环境及低成本大批量简单任务。
五、Kinova 的不可替代性
当前机器人行业陷入内卷,而Kinova 始终守住协作机器人本质——不是“更强的机器”,而是“更懂协作、更安全、更易用、更能支撑创新”的工具,坚守“以人为中心”的基因。
对实验室而言,它是开箱即用、论文可复现的标准平台,让前沿研究从理想走向现实;对医疗团队而言,它是安全可靠的设备,守护人类健康与尊严;对工程师而言,它是灵活开放的硬件底座,适配未来机器人发展方向;对行业而言,它定义了协作机器人的正确形态,证明无需极端参数,守住协作本质即可占据高端市场。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 5
5 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)