惯性导航(IMU)原理(二)观测模型与标定
1 理论输出模型回顾
在上一篇推文中,我们探讨了理想条件下惯性传感器组件(ISA)的理论输出模型。设定载体坐标系(bbb 系)与当地导航坐标系(nnn 系)完全对齐时,加速度计与陀螺仪的理论输出可以统一表达。加速度计感知的是比力,而陀螺仪感知的是载体相对于惯性空间的角速度。加速度计与陀螺仪的三轴理论输出矩阵形式分别如下:
fn=[fNfEfD]=[aNaEaD]−[00g] \displaystyle \boldsymbol{f}^n = \begin{bmatrix} f_N \\ f_E \\ f_D \end{bmatrix} = \begin{bmatrix} a_N \\ a_E \\ a_D \end{bmatrix} - \begin{bmatrix} 0 \\ 0 \\ g \end{bmatrix} fn= fNfEfD = aNaEaD − 00g
ωinn=[ωNωEωD]=[vER+h+ωecosφ−vNR+h−vER+htanφ−ωesinφ] \displaystyle \boldsymbol{\omega}_{in}^n = \begin{bmatrix} \omega_N \\ \omega_E \\ \omega_D \end{bmatrix} = \begin{bmatrix} \displaystyle\frac{v_E}{R+h} + \omega_e\cos\varphi \\ \displaystyle-\frac{v_N}{R+h} \\ \displaystyle-\frac{v_E}{R+h}\tan\varphi - \omega_e\sin\varphi \end{bmatrix} ωinn= ωNωEωD = R+hvE+ωecosφ−R+hvN−R+hvEtanφ−ωesinφ
2 惯导误差的组成与观测模型
在工程实践中,传感器输出的原始数据中不可避免地夹杂着各类误差。为了从含有污染的数据中恢复真实的物理量,必须建立观测模型。
惯性器件的误差主要由静态误差和动态误差交织组成。静态误差主要包含零偏和噪声,零偏是指当输入物理量为零时传感器的输出非零,噪声是高频的随机干扰分量。动态误差则包含比例因子误差、交轴耦合误差以及非线性误差,它们主要表现为输出信号与输入物理量之间偏离了理想的线性比例,或者由于三轴安装不严格正交导致某一个轴的输出受到了其他两轴输入量的干扰。
综合各项确定的系统误差与随机误差成分,我们可以将三轴加速度计与三轴陀螺仪的观测模型一并给出。该模型是后续进行误差标定与数据补偿的核心数学基础,其公式如下:
f~=f+bf+S1f+S2f2+Nff+δg+ϵf \displaystyle \tilde{\boldsymbol{f}} = \boldsymbol{f} + \boldsymbol{b}_{f} + \boldsymbol{S}_{1} \boldsymbol{f} + \boldsymbol{S}_{2} \boldsymbol{f}^2 + \boldsymbol{N}_{f} \boldsymbol{f} + \delta \boldsymbol{g} + \boldsymbol{\epsilon}_{f} f~=f+bf+S1f+S2f2+Nff+δg+ϵf
ω~=ω+bω+Sωω+Nωω+ϵω \displaystyle \tilde{\boldsymbol{\omega}} = \boldsymbol{\omega} + \boldsymbol{b}_{\omega} + \boldsymbol{S}_{\omega} \boldsymbol{\omega} + \boldsymbol{N}_{\omega} \boldsymbol{\omega} + \boldsymbol{\epsilon}_{\omega} ω~=ω+bω+Sωω+Nωω+ϵω
在上述的统一观测模型中,
- f~\tilde{\boldsymbol{f}}f~ 与 ω~\tilde{\boldsymbol{\omega}}ω~ 表示传感器的实际测量值,f\boldsymbol{f}f 与 ω\boldsymbol{\omega}ω 为真实物理量;
- b\boldsymbol{b}b 统一代表传感器的零偏矢量;
- S\boldsymbol{S}S 代表比例因子误差构成的对角阵(其中加速度计还细分了线性项 S1\boldsymbol{S}_{1}S1 与非线性项 S2\boldsymbol{S}_{2}S2);
- N\boldsymbol{N}N 为由于非正交安装引起的交轴耦合误差矩阵;
- ϵ\boldsymbol{\epsilon}ϵ 为高频测量噪声矢量;
- 此外,针对加速度计的模型中还特别引入了重力异常补偿项 δg\delta \boldsymbol{g}δg 以提高高精度场景下的解算严密性。
3 传感器标定方法
3.1 加速度计标定
在建立了加速度计的观测模型后,我们需要通过标定实验来求解模型中的各项误差参数。基于重力基准,最经典的实验室标定方法便是两位置与六位置静态标定。
3.1.1 单轴两位置静态标定
两位置标定是最基础的标定逻辑。其核心思想是将该敏感轴依次严格垂直向上和垂直向下对准当地水平面,使其交替感受正向和负向的重力加速度 ggg。
在理想对准的情况下,当某一敏感轴(设为输入轴)分别指向上和向下时,其对应的观测输出 f~up\tilde{f}_{up}f~up 与 f~down\tilde{f}_{down}f~down 可简化表达为:
{f~up=b+(1+δs)g(重力与加速度计正方向同向)f~down=b−(1+δs)g(倒置,重力与正方向反向) \begin{cases} \displaystyle \tilde{f}_{up} &= b + (1+\delta s)g \text{(重力与加速度计正方向同向)}\\ \\ \displaystyle \tilde{f}_{down} &= b - (1+\delta s)g\text{(倒置,重力与正方向反向)} \end{cases} ⎩
⎨
⎧f~upf~down=b+(1+δs)g(重力与加速度计正方向同向)=b−(1+δs)g(倒置,重力与正方向反向)
其中,bbb为零偏,δs\delta sδs为比例因子误差
解方程组得:
{b=f~up+f~down2δs=f~up−f~down2g−1 \begin{cases} \displaystyle b &= \displaystyle\frac{\tilde{f}_{up} + \tilde{f}_{down}}{2}\\ \\ \displaystyle \delta s &= \displaystyle\frac{\tilde{f}_{up} - \tilde{f}_{down}}{2g} - 1 \end{cases} ⎩
⎨
⎧bδs=2f~up+f~down=2gf~up−f~down−1
两位置法物理意义清晰、计算简便,但它的局限性在于只能标定单一轴向的自身误差,无法获取由于三轴非正交安装引起的交轴耦合误差。
3.1.2 三轴六位置静态标定
将两位置法拓展到三维空间的三轴,可获取三轴加速度计的完整误差参数。将 XXX、YYY、ZZZ 三根敏感轴依次垂直向上和垂直向下放置,总共构建六个静态测试姿态。在每个姿态下,理论上只有一根轴承受重力 ggg 或 −g-g−g,其余两根与重力正交的轴系理论输入应当严格为零。
例如,当 ZZZ 轴垂直向上指向(感受重力 ggg)时,理论上 XXX 轴的输出比力为零。但由于零偏 bxb_xbx 以及 Y、ZY、ZY、Z 轴输入对 XXX 轴的交轴耦合效应 γ\gammaγ 的存在,XXX 轴的实际输出为:
f~x=bx+sxfx+γyxfy+γzxfz \displaystyle \tilde{f}_{x} = b_x +s_{x}f_{x+}\gamma_{yx}{f}_{y} + \gamma_{zx}{f}_{z} f~x=bx+sxfx+γyxfy+γzxfz
其中 f~x\tilde{f}_{x}f~x为观测值,fff为真实输入值,γ\gammaγ为交轴耦合误差分量
回顾之前加速度计观测模型(忽略非线性因子与重力异常):
f~=f+bf+Sf+Nf+εf \tilde{\boldsymbol{f}} = \boldsymbol{f} + \boldsymbol{b}_f + \mathbf{S}\boldsymbol{f} + \mathbf{N}\boldsymbol{f} + \boldsymbol{\varepsilon}_f f~=f+bf+Sf+Nf+εf
将加速度计的观测模型写为矩阵形式得:
[f~xf~yf~z]=[sxγyxγzxγxysyγzyγxzγyzsz][fxfyfz]+[baxbaybaz] \begin{bmatrix} \tilde{f}_x \\ \tilde{f}_y \\ \tilde{f}_z \end{bmatrix} = \begin{bmatrix} s_x & \gamma_{yx} & \gamma_{zx} \\ \gamma_{xy} & s_y & \gamma_{zy} \\ \gamma_{xz} & \gamma_{yz} & s_z \end{bmatrix} \begin{bmatrix} f_x \\ f_y \\ f_z \end{bmatrix} + \begin{bmatrix} b_{ax} \\ b_{ay} \\ b_{az} \end{bmatrix}
f~xf~yf~z
=
sxγxyγxzγyxsyγyzγzxγzysz
fxfyfz
+
baxbaybaz
注意:这里的sss为比例因子,等于1+比例因子误差1+比例因子误差1+比例因子误差。简化得:
[f~xf~yf~z]=[sxγyxγzxbaxγxysyγzybayγxzγyzszbaz][fxfyfz1]→f~=M[f1] \begin{bmatrix} \tilde{f}_x \\ \tilde{f}_y \\ \tilde{f}_z \end{bmatrix} = \begin{bmatrix} s_x & \gamma_{yx} & \gamma_{zx} & b_{ax} \\ \gamma_{xy} & s_y & \gamma_{zy} & b_{ay} \\ \gamma_{xz} & \gamma_{yz} & s_z & b_{az} \end{bmatrix} \begin{bmatrix} f_x \\ f_y \\ f_z \\ 1 \end{bmatrix} \rightarrow \tilde{\boldsymbol{f}} = \mathbf{M} \begin{bmatrix} \boldsymbol{f} \\ 1 \end{bmatrix}
f~xf~yf~z
=
sxγxyγxzγyxsyγyzγzxγzyszbaxbaybaz
fxfyfz1
→f~=M[f1]
将X、Y、ZX、Y、ZX、Y、Z正反置的三轴输出向量分别用f1∼f6\boldsymbol{f}_{1}\sim\boldsymbol{f}_{6}f1∼f6表示,得到观测方程:
[f~1f~2f~3f~4f~5f~6]=M[f1f2f3f4f5f6111111] \begin{bmatrix} \tilde{\boldsymbol{f}}_1 & \tilde{\boldsymbol{f}}_2 & \tilde{\boldsymbol{f}}_3 & \tilde{\boldsymbol{f}}_4 & \tilde{\boldsymbol{f}}_5 & \tilde{\boldsymbol{f}}_6 \end{bmatrix} = \mathbf{M} \begin{bmatrix} \boldsymbol{f}_1 & \boldsymbol{f}_2 & \boldsymbol{f}_3 & \boldsymbol{f}_4 & \boldsymbol{f}_5 & \boldsymbol{f}_6 \\ 1 & 1 & 1 & 1 & 1 & 1 \end{bmatrix} [f~1f~2f~3f~4f~5f~6]=M[f11f21f31f41f51f61]
L=MA \boldsymbol{L} = \boldsymbol{M}\boldsymbol{A} L=MA
M矩阵中包含4∗3=124*3=124∗3=12个待估参数,共有3∗6=183*6=183∗6=18个方程,由此就进入到我们喜闻乐见的平差(最小二乘)环节了,最终结果:
M^=LAT(AAT)−1 \hat{\mathbf{M}} = \mathbf{L} \mathbf{A}^{\mathrm{T}} (\mathbf{A} \mathbf{A}^{\mathrm{T}})^{-1} M^=LAT(AAT)−1
3.2 陀螺仪标定
陀螺仪标定的核心逻辑与加速度计高度相似,都是利用已知的高精度外部物理基准为参考,通过观测其实际输出反推系统内的误差参数。
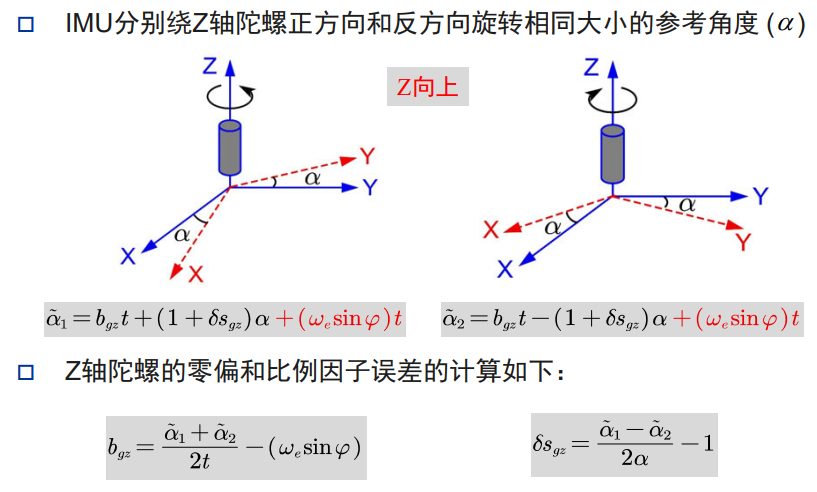
由此,我们可以通过高精度转台提供已知的、精确的外部基准。陀螺仪感知的是角速度,是一个瞬时值,受采样频率、噪声和转台速度波动的影响很大。而角度是角速度对时间的积分。由高精度转台控制的旋转 α\alphaα,可以将瞬时角速度的扰动平均化。
对陀螺仪观测模型积分得:
θ~=θ+bωt+Sθ+Nθ\tilde{\theta} = \theta + b_\omega t + S\theta + N\thetaθ~=θ+bωt+Sθ+Nθ
类比加速度计正反置,将IMU正逆旋转相同的角度,并考虑地球自转ωe\omega_{e}ωe,可得如图结果。同样仿照加速度计进行平差,完成陀螺仪标定。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 9
9 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)