MWORKS MCP 全产品线开放:加速装备工程全流程智能研发
当 AI 开始深度重塑软件工程流程,装备系统工程也正在迎来一场从需求分析、架构设计、设计建模到仿真验证的端到端变革。为加速这一变革真正走向落地,同元软控正式发布并开源一整套 MWORKS MCP Servers。
MWORKS MCP Servers 具体包括科学计算环境Syslab MCP Server、系统建模仿真环境Sysplorer MCP Server、框图建模环境Sysblock MCP Server、几何原型设计环境SysCAD MCP Server、需求分析与架构设计环境Sysbuilder MCP Server 的全流程能力体系。

此次开源,不只是一次能力开放,更是一次面向 AI 时代装备系统工程新范式的主动探索——让 AI Agent 不再停留于简单调用工具,而是进一步走进真实工程场景,深度参与装备智能化系统工程全流程,释放更高效、更智能的工程创新潜能。
五大MCP,构建全流程能力体系
01 · Syslab MCP
作为面向Syslab / Julia环境的MCP服务,Syslab MCP将AI能力与工程计算能力打通,使AI不仅能够理解代码,还可以直接调用本地计算环境完成算法执行、脚本运行、文档检索与函数映射等操作,实现从"代码生成"到"计算执行"的闭环。
在这一能力基础上,AI Agent不再只是辅助编写代码,还可以参与到实际工程计算流程中,显著提升算法开发与工程分析效率。
典型应用场景
1. 算法开发
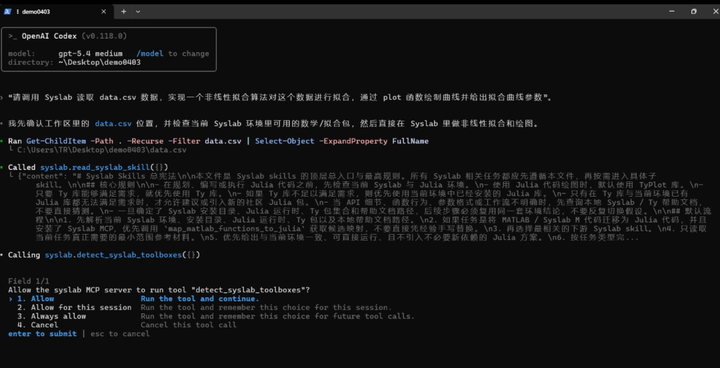
展示如何通过 Syslab MCP Server 实现一个 Julia 算法脚本,对实验数据进行非线性函数拟合。
syslab MCP
提示词示例:
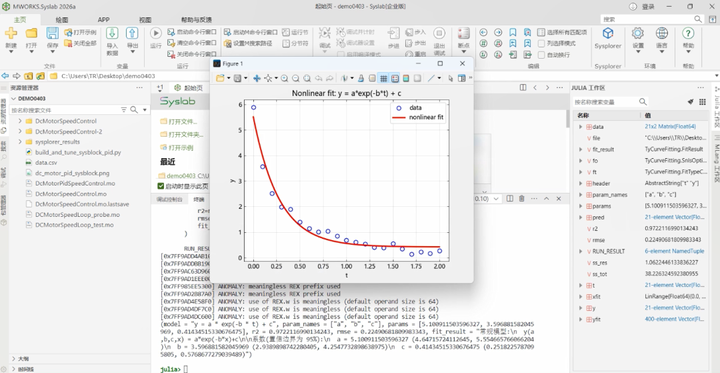
"请调用 Syslab 读取 data.csv 数据,实现一个非线性拟合算法对这个数据进行拟合,绘出曲线并给出拟合曲线参数"
最终可以得到的拟合曲线和参数结果,包含完整的曲线图表和拟合参数输出。
2. 性能优化
展示如何优化代码性能。以二维热扩散模拟为例:
二维热扩散模拟优化前的代码:
function make_initial_temperature(nx::Int, ny::Int)
u = zeros(Float64, nx, ny)
for j in1:ny
for i in1:nx
dx = i - nx ÷2
dy = j - ny ÷2
r2 = dx * dx + dy * dy
if r2 <900
u[i, j]=100.0
elseif r2 <3600
u[i, j]=40.0
end
end
end
u
end
function diffuse_slow(u0::Matrix{Float64}, alpha::Float64, steps::Int)
u = copy(u0)
for _ in1:steps
next = copy(u)
next[2:end-1,2:end-1]=
u[2:end-1,2:end-1].+
alpha .*(
u[1:end-2,2:end-1].+
u[3:end,2:end-1].+
u[2:end-1,1:end-2].+
u[2:end-1,3:end].-
4.0.* u[2:end-1,2:end-1]
)
u = next
end
u
end
u0 = make_initial_temperature(500,500)
@time u = diffuse_slow(u0,0.12,260)
println("center temperature = ", u[250,250],", corner temperature = ", u[1,1])代码在每一步中复制整个矩阵,这导致内存占用大、计算缓慢。例如,对于一个 500×500 的网格,进行 260 步迭代时,运行时间超过 1.7 秒,并消耗了超过 3.8 GB 内存。尽管计算结果正确,但性能瓶颈明显,难以应对更大规模或更多迭代的模拟。
输入提示词示例:
“帮我对 slow_heat_diffusion.jl 进行性能优化,并编辑在新 Julia 脚本中”
优化后生成的代码示例:
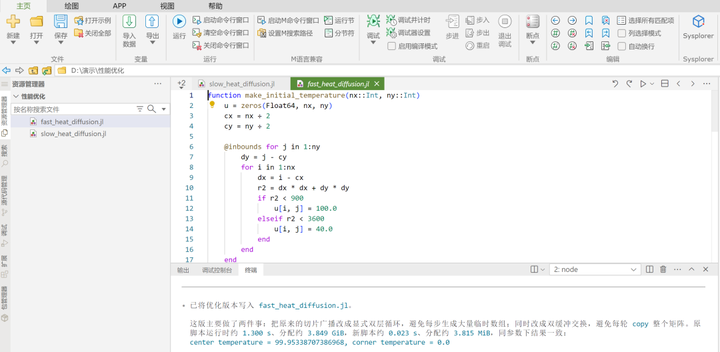
实际运行后结果为:
``
dataframe
0.025668seconds(4allocations:3.815MiB)
center temperature =99.95338707386968, corner temperature =0.0
```可以看出,优化后性能提升明显。把原来的切片广播改成显式双层循环,避免每步生成大量临时数组;同时改成双缓冲交换,避免每轮复制整个矩阵。

通过调用MCP,刚接触Julia编码的人也能成为专家。
3. M 代码迁移
展示如何将 M 代码迁移为可执行的 Julia 代码,以太阳黑子数据分析为例:
提示词示例:
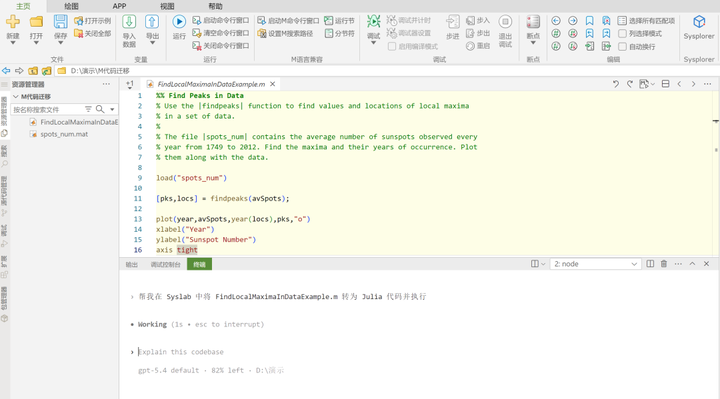
"帮我在 Syslab 中将 FindLocalMaximaInDataExample.m 转为 Julia 代码并执行"
M代码示例:
进行转换后的 Julia 代码示例:
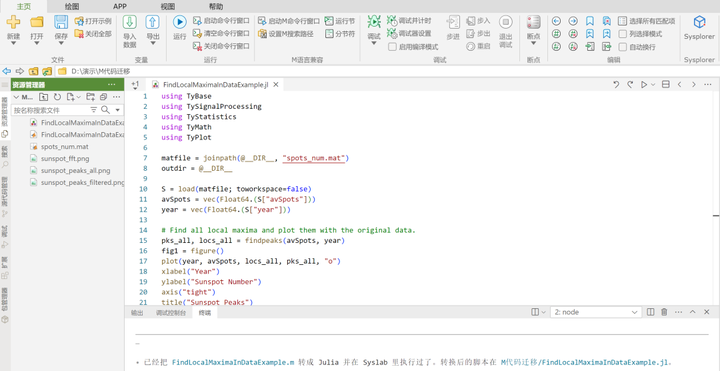
文件 spots_num 包含了从 1749 年到 2012 年每年观测到的太阳黑子平均数量,代码中使用傅里叶变换验证太阳黑子 11 年周期特性。
验证结果图及参数:
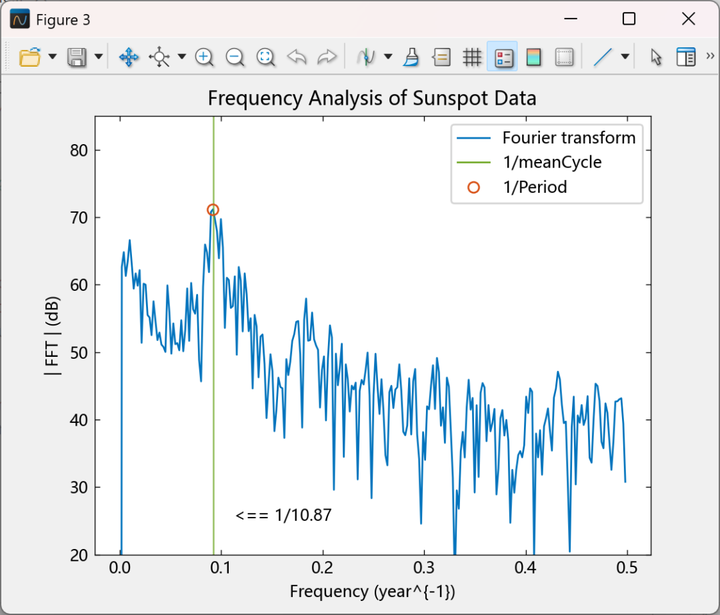
meanCycle = 10.8696 年 Period = 10.8936 年
验证结果与理论值 11 年高度吻合,成功完成代码迁移和数据分析任务。
Tools
Syslab MCP 共提供 9 个工具,覆盖 Syslab 的环境探测、会话管理、代码执行、文档检索与 MATLAB 迁移支持等能力,工具能力可按用途分为以下几类:
1. 环境探测与信息识别工具
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
detect_syslab_toolboxes |
环境探测工具 |
用于返回本机 Syslab 版本信息、Julia 环境信息、Syslab Julia 环境中已安装的 Julia 包,以及可发现的本地包文档路径,适合作为使用前的环境识别与能力探测入口。 |
2.会话与运行控制工具
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
restart_julia |
会话重启工具 |
用于重启全局 Julia 会话,适合在执行异常、环境污染或状态失效时进行运行环境恢复。 |
|
list_sessions |
会话列表工具 |
用于列出当前所有活跃会话及其状态,便于查看当前运行中的会话信息和整体连接状态。 |
3.代码执行与脚本运行工具
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
evaluate_julia_code |
代码执行工具 |
用于执行一段 Julia 代码并返回输出与最终结果,适合交互式计算、函数调用、调试验证和快速原型测试。 |
|
run_julia_file |
脚本运行工具 |
用于执行本地 Julia 脚本并返回输出结果,适合运行已有 `.jl` 文件、批处理脚本或完整计算流程。 |
4.文档与知识检索工具
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
read_syslab_skill |
Skill读取工具 |
用于读取 Syslab skill markdown 文件内容,适合获取工具使用规范、能力说明和操作约束等上下文信息。 |
|
search_syslab_docs |
文档搜索工具 |
用于搜索本地已索引的 Syslab 帮助文档,适合按关键词查询相关包、函数说明和使用资料。 |
|
read_syslab_doc |
文档阅读工具 |
用于读取一篇已索引的 Syslab 帮助文档正文内容,适合进一步查看搜索结果对应的详细接口说明与使用示例。 |
5.MATLAB 迁移与函数映射工具
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
map_matlab_functions_to_julia |
MATLAB迁移映射工具 |
用于将一组 MATLAB 函数名映射到 Syslab Julia 环境中的候选等价函数及相关文档,适用于 MATLAB 代码迁移、函数替换和兼容性分析场景。 |
02 · Sysplorer MCP
Sysplorer MCP Server是面向MCP协议的Sysplorer API服务化能力封装层。它把Sysplorer中的关键对象与关键能力,以标准化方式开放给AI客户端。装备工程智能体、企业AI助手、Claude/CodeX/Gemini通用AI客户端等,都可以通过MCP协议连接Sysplorer,读取系统模型上下文,并在授权范围内调用仿真相关能力。
典型应用场景
1. 工程模型库构建
提示词输入(可让AI生成)
按照标准模型库开发流程与规范,帮我构建一个液压模型库 " Hydraulics",包含以下内容:
1. 泵、阀、缸关键元件
2. 传感器、边界模型
3. 示例与测试模型
AI与Sysplorer MCP协作,按照标准模版把完整模型库构建出来,并对每个组件进行单元测试。
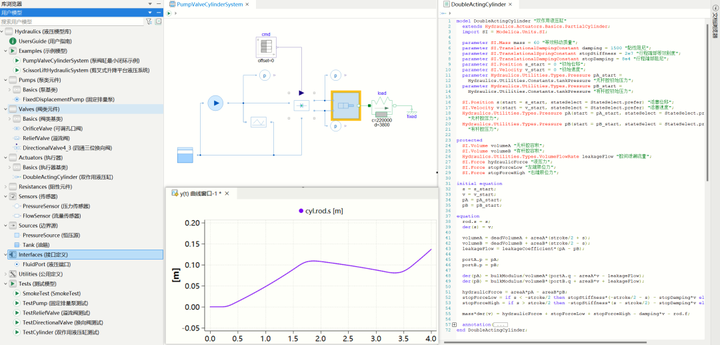
2. 系统模型开发
提示词输入(可让AI生成)
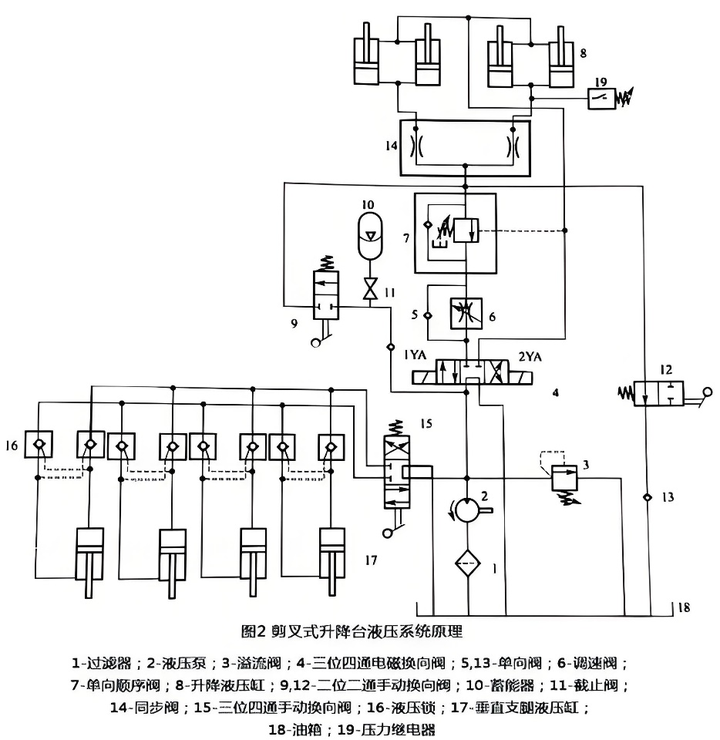
请根据所给剪叉式升降台液压系统原理图,用Sysplorer内置库TYHydrualics自主完成以下任务:
1. 自动识别图中液压元件及编号含义
2. 自动分析各元件之间的油路连接关系
3. 建立完整液压系统仿真模型
4. 补充合理的默认参数与初始条件 实现升起、下降、支腿动作、保压与同步控制仿真
5. 输出模型结构说明、关键假设及仿真结果
AI与Sysplorer MCP协作,在30分钟内经过多轮自主迭代,实现了预期的功能效果。
3. 系统建模问题诊断与调试
问题1 :
提示词输入(直接把报错扔给AI):
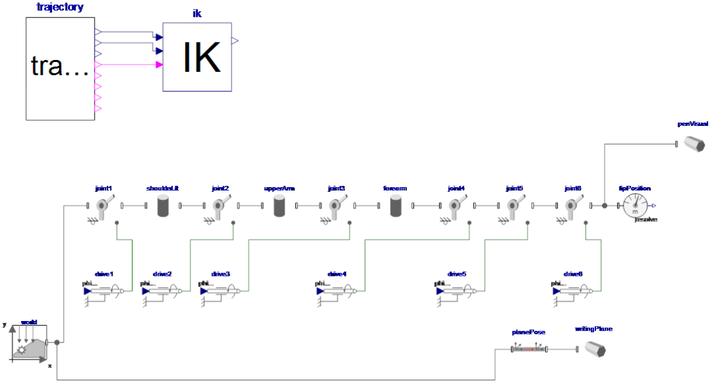
这个 “手写OK” 的 6 自由度 Modelica 工业机械手模型跑不过,帮我修复它。
AI诊断与修复过程
错误信息:Error:divide-zero error: (ik.elbowSign*(if 0.0>1.0-ik.c3^2 then 0 else (-2)*der(ik.c3,2)*ik.c3+(-2)*der(ik.c3)*der(ik.c3)))/(sqrt(max(0.0,1.0-ik.c3^2))) = (-0)/(0). Error:Failed to initialize Solver!。
问题分析:第一层是几何不可达。原来的默认配置下,初始化时腕点等效距离大约是 0.722 m,而前两段连杆总长只有 0.60 m,所以 IK 只能把 c3 硬夹到 1。第二层是数值奇异。c3 = 1 后,s3 = sqrt(1 - c3^2) 正好变成 0,初始化求导时就出现了你看到的 (-0)/(0),随后求解器初始化失败。
修复:
-
在 SixAxisPlanarWriterIK.mo (line 41) 增加 c3Raw 和 c3Margin,把肘部解改成带裕量的正则化夹取,避免真的落到 |c3|=1 的奇异点;关键位置在 SixAxisPlanarWriterIK.mo (line 78)。
-
在 WriteOK.mo (line 6) 把默认机械臂几何和书写区域改到可达范围内:肩高降到 0.30,两段主臂改为 0.42 和 0.36,字迹中心移到 x=0.42,书写平面显示也同步调整,见 WriteOK.mo (line 23) 和 WriteOK.mo (line 45)。
问题2:
提示词输入(把问题描述给AI):
ok写的不规整 帮我分析原因并修复
AI诊断与修复过程
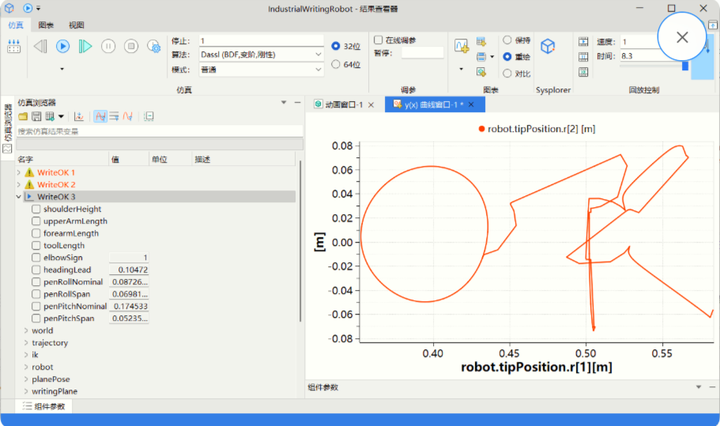
调试目标:修复 “OK” 字样不规整的问题,让实际末端轨迹和参考书写轨迹一致
修复:
-
“OK” 不规整的根因有两个。第一个是之前实际测量点取在视觉笔杆末端,但 IK 又按带工具偏置的近似姿态去算,导致真实末端和参考轨迹不重合。第二个是你当前 y(x) 图画的是整段 robot.toolPosition,其中把提笔换笔的空中移动也一起连进去了。
-
我把真实书写接触点改到了 joint6.frame_b,让 toolPosition 直接代表落笔点,再把示例里的 IK 工具偏置设为 0,这样实际末端就严格跟随参考轨迹,见 SixAxisWritingArm.mo (line 127) 和 WriteOK.mo (line 10)。
-
我还把 K 的默认几何比例和 Hermite 切向量调得更规整,竖笔、上斜、下斜的比例更统一,见 OKHandwriting.mo (line 13) 和 OKHandwriting.mo (line 69)。
4. 系统模型结构与参数优化
提示词示例:
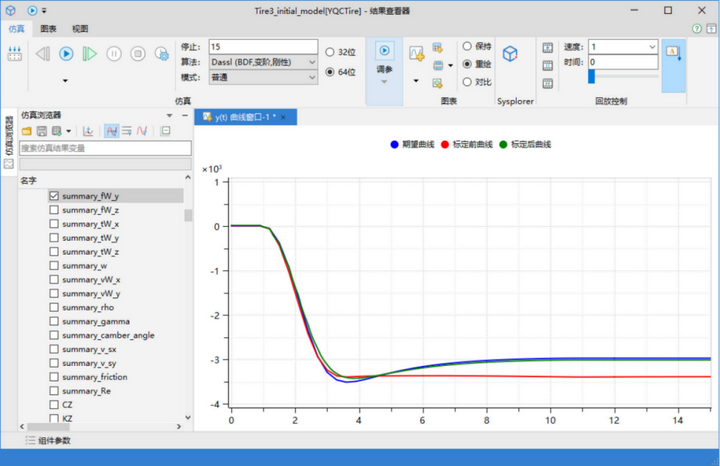
按标定工具流程和Skills对项目中的轮胎模型进行标定,期望结果为target.csv,禁止修改轮胎结构、尺寸等参数。
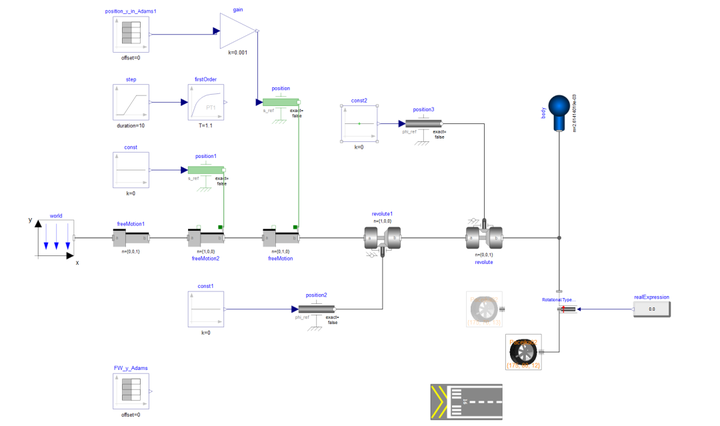
项目模型
AI按照“需求描述->标定case配置->仿真执行->目标函数评估->优化搜索->报告与产物输出”过程,完成了参数标定,可以看到标定前曲线、标定后曲线与期望曲线的对比。
Tools
Sysplorer MCP共提供 13 个工具,覆盖 Sysplorer 的启动、建模到仿真全流程,工具能力可以按用途分为以下几类:
1. 会话与连接
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
session_manager |
会话管理工具 |
用于启动、连接、探测、重连和关闭 Sysplorer 会话,是所有后续工具调用的基础入口。 |
2. 建模全流程工具
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
load_library |
库加载工具 |
用于加载 Modelica 标准库或商业库,为后续打开模型、查询类文档和仿真准备运行环境。 |
|
model_manager |
模型管理工具 |
用于执行模型打开、新建、加载文件、卸载、保存、导出原理图,以及组件、端口和类文本等内省查询。 |
|
check_model |
模型检查工具 |
用于对一个或多个模型执行实例化和编译检查,可结合 Smart Layout 写回与重载流程做建模前校验。 |
|
translate_model |
模型翻译工具 |
用于调用 TranslateModel 完成代码生成与翻译流程,可用于生成仿真代码或后续部署所需的中间结果。 |
|
simulate_model |
模型仿真工具 |
用于执行自动、独立或实时仿真,并在仿真后校验结果变量是否可读取,是模型运行阶段的核心入口。 |
|
smart_layout |
自动布局工具 |
用于计算布局、整合生成结果并将 Placement 和连线信息写回系统级 .mo 文件,适合自动建模后的版式整理。 |
3. 脚本与自动化
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
call_code |
脚本调用工具 |
用于执行 run_script、异步任务、就绪分派和 CAD 工具箱等能力,其中 mode="run_script" 是 Sysblock 程序化建图和脚本化操作的重要入口。 |
4. 文档与资源检索
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
resources_retrieval |
资源检索工具 |
用于检索 resources/ 中的规则、案例和语料,适合查询流程建议、选型经验、排障知识和示例资料。 |
|
get_api_document |
接口文档工具 |
用于查询 Sysplorer Python API 的帮助说明,适合确认命令名、参数含义和官方接口用法。 |
|
get_lib_model_document |
模型库文档工具 |
用于查询已加载库模型类的真实说明、参数、端口和导出文档内容,适合核对组件级上下文。 |
5. 结果与可视化
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
result_manager |
结果读取工具 |
用于打开结果文件、列出变量、读取时序数据、读取指定时刻值以及获取时间轴信息。 |
|
plot_manager |
绘图动画工具 |
用于在 Sysplorer 中执行结果绘图与动画创建,支持变量可视化和动态展示。 |
03 · Sysblock MCP
Sysblock 是 MWORKS. Sysplorer 平台中的框图建模范式 ,是基于Modelica扩展的信号流建模方式。它通过拖拽模块、连接信号线的方式构建控制系统、信号处理系统等模型,支持自动代码生成。
Sysblock MCP 是连接 AI 编程助手与Sysblock 建模仿真平台的智能桥梁,通过自然语言即可驱动专业仿真。
典型应用场景
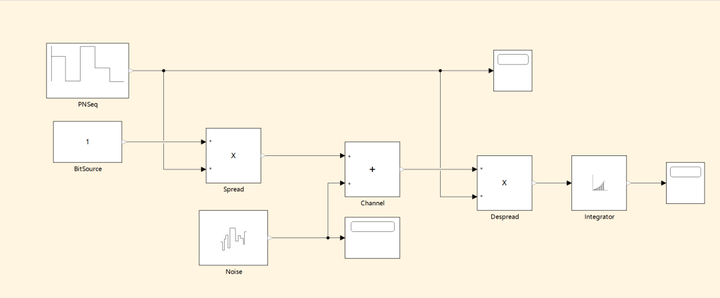
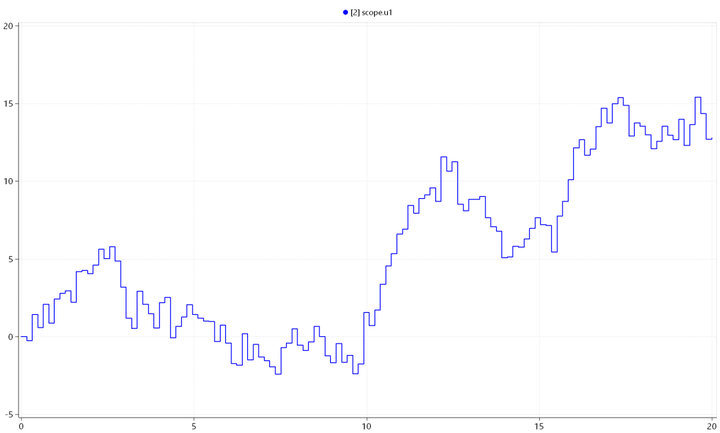
DSSS 扩频 — 解扩通信链路
使用 Sysblock 搭建DSSS 扩频 — 解扩通信链路,体现:
-
信源 → 调制 → 扩频 → 信道 → 解扩 → 解调解码 → 接收
-
扩频码(PN 码)生成
-
直接序列扩频与同步解扩
-
调制解调、载波同步
-
加性高斯白噪声信道 / 窄带干扰
-
定义扩频增益:如 15、31、63(m 序列长度)。
Tools
-
脚本自动化:通过 Python API 程序化构建 Sysblock框图,支持参数扫描、批量仿真等高级操作。
-
模型管理:支持加载、创建、保存 Sysblock 框图模型,自动处理依赖库加载。
-
智能布局:自动生成美观的系统原理图布局,将组件坐标和连线信息写回 .mo 文件,无需手动排版。
-
编译验证:一键检查模型语法与连接正确性,编译失败时自动尝试修复(最多3次),确保模型可运行。
-
仿真运行:支持独立仿真、实时仿真等多种模式,自动处理翻译流程,仿真完成后可读取时序数据。
-
结果分析:读取仿真变量、绘制曲线、计算 KPI 指标。
-
知识检索:内置 RAG 智能检索引擎,覆盖建模规范、2700+ 组件文档、37 个商业库素材,精准推荐组件用法。
04 · SysCAD MCP
SysCAD 的核心定位是连接几何原型设计与系统仿真模型的自动化桥梁,通过 SysCAD MCP Servers,大模型可以直接操控底层接口,自动完成从参数化几何模型生成、物理属性计算、多体设计等操作,最终自动生成 Modelica 模型,从而充分发挥 Sysplorer 在多领域统一建模上的优势。
典型应用场景
一句话生成六轴机械臂
为了直观展示其能力,我们尝试让大模型全自动生成一个六自由度工业机械臂的多体动力学模型。
只需提供一份简单的任务节拍分解表(如目标节拍 10.0 秒、标准搬运工况),并输入提示词:
提示词示例:
"按照 CAD 几何模型规则,依据功能描述文档,创建六自由度机械臂的 CAD 模型,并将其转换成多体动力学 Modelica 模型。要求生成的机械臂 CAD 模型有真实感。"
大模型迅速理解需求,通过 syscad_run_script 接口,在 SysCAD 中瞬间完成了D-H参数设计、数十个零件的创建、钢/铝材质的赋予等操作,以及 6 个旋转副和 1 个固定副的精准多体约束设计。
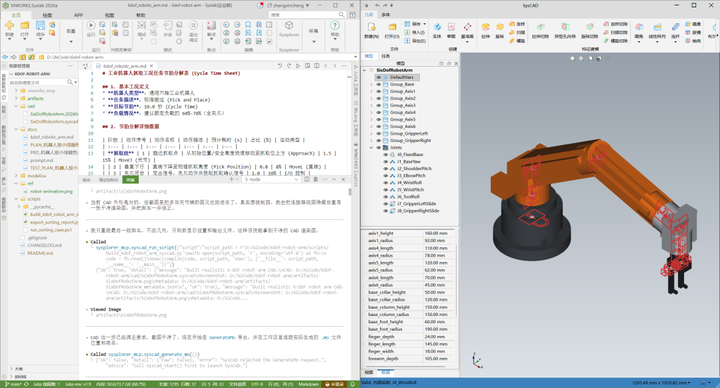
建模完成后,大模型自动调用 syscad_generate_mo,将这个极具真实感的六轴机械臂CAD模型自动转换为 Modelica 多体模型,并无缝导入 Sysplorer,通过调用 Sysplorer MCP,大模型进一步为六个关节添加了驱动信号,模拟了完整的搬运工况。
通过 SysCAD MCP,原本需要工程师耗费数小时的繁琐建模工作,现在只需一句话即可由 AI 自动完成,真正实现了 AI 驱动的 CAD-系统仿真一体化。
Tools
在 SysCAD 与 Sysplorer 的协同生态中,MCP 扮演着“智能调度员”的角色,形成了一个几何设计-仿真-优化的迭代闭环:
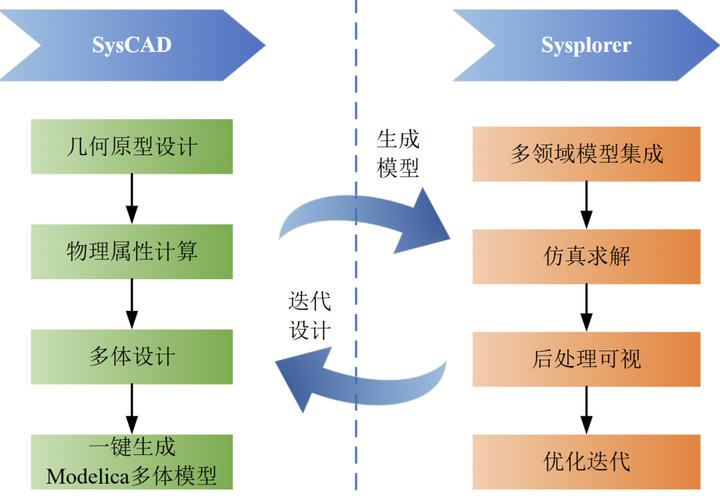
为了实现这一闭环,SysCAD MCP 提供了 6 个核心Tools。与 `sysplorer-mcp-server` 提供的建模、仿真和资源检索能力不同,这 6 个工具只聚焦 SysCAD 侧的能力:启动与关闭 SysCAD、执行 SysCAD 内部 Python 脚本、同步参数,以及触发 Modelica 导出。它们适合承担整个 CAD 到系统模型流程中“几何建模与导出”这一段工作。
从用途上看,这些工具可以分为以下 3 类:
1. 会话准备与生命周期
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
health_check |
健康检查工具 |
用于检查 SysCAD IPC named pipe 是否在线,是判断当前客户端能否和 SysCAD 建立通信的最轻量入口。若返回找不到 pipe,通常说明 MCP 服务本身已启动,但 SysCAD 尚未启动或尚未附着完成。 |
|
start |
启动SysCAD工具 |
用于先附着到现有 Sysplorer 会话,再由 Sysplorer 拉起 SysCAD。它通常是所有 CAD 建模任务的第一步;如果复用了已有 Sysplorer 实例,返回中的 detail 可能为 false,但只要 ok=true,仍应按成功处理。 |
|
close |
关闭SysCAD工具 |
用于通过 SysCADStarter.CloseSysCAD(force) 关闭 SysCAD。默认会尽量正常关闭;若存在未保存文档导致确认框阻塞,可传入 force=true 丢弃未保存修改并强制关闭。 |
2. 参数同步与导出
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
update_param |
参数同步工具 |
用于触发 Sysplorer 到 SysCAD 的参数同步,使 Sysplorer 侧的设计参数、表达式或配置变更回写到当前 CAD 模型。适合在参数驱动建模、设计变量迭代以及重新导出前执行。 |
|
generate_mo |
Modelica 导出工具 |
用于调用 SysCADStarter.GenerateMo() 触发 Modelica 导出。它只表示"导出请求已受理并入队",不表示导出已经完成;调用前应尽量确保相关文档已保存,导出后再回到 sysplorer-mcp-server 侧继续做加载、检查、翻译或仿真验证。 |
3. 脚本化建模与自动化
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
run_script |
脚本执行工具 |
用于在 SysCAD 内部 Python 环境中执行完整脚本文本,是几何建模、导入 CAD、分组、材质设置、标架与运动副创建等自动化任务的核心入口 |
05 · Sysbuilder MCP
Sysbuilder_MCP是将 Sysbuilder 的 SysML 建模能力以 MCP 协议开放至 AI 生态的核心执行层。它以自然语言为入口,使大模型能够直接驱动系统工程建模过程,自动完成从需求到架构再到仿真准备的全流程建模,并实现架构向几何设计与仿真模型的贯通生成。
典型应用场景
1. 需求分析
用户通常以自然语言描述或需求文档形式提出系统需求。通过大模型对原始需求内容进行语义理解与结构解析,结合 Sysbuilder MCP 提供的建模能力,能够将非结构化需求自动转化为规范化的 SysML 需求模型。
以固体发动机系统为例,用户仅需提供一份需求文档或自然语言描述,并输入相应提示词,即可自动完成需求建模过程:
提示词示例:
分析example下的固体发动机系统的原始建模需求,以及需求指标,使用Sysbuilder软件进行需求建模。
大模型便会按要求先做了两步准备:
-
先读取了SysML建模规范,再读取了强制约束文件 Sysbuilder建模要求。
-
之后解析了需求源文件固体发动机建模需求。
接着启动 Sysbuilder开始全自动需求分析与建模:
2. 功能定义
在完成需求建模后,需要进一步对系统“如何实现需求”进行分析。基于大模型的语义理解与推理能力,Sysbuilder MCP 可自动从需求模型中提取功能信息,并构建系统功能模型。
提示词示例:
在固体发动机需求模型的基础上提取功能需求,进行功能定义与分解,构建功能模型,并建立功能到需求的满足关系。
在已有需求模型的基础上连接Sysbuilder开始全自动功能定义与建模:
3. 架构设计
在完成需求建模与功能分析后,系统设计进入架构设计阶段。基于大模型的语义理解与推理能力,Sysbuilder MCP 可自动将功能模型映射为系统结构模型,构建系统的整体架构。
提示词示例:
从固体发动机的功能模型出发,进行固体发动机的架构设计,构建架构模型,并建立功能到结构的分配关系。
在已有功能模型的基础上连接Sysbuilder开始全自动架构设计与建模:
4. 模型贯通
在完成系统架构设计后,系统模型不应仅停留在结构表达层面,而应进一步向仿真分析与工程设计环节延伸。基于大模型的语义理解与模型解析能力,Sysbuilder MCP 可对系统架构模型及参数模型进行自动解析,实现模型向仿真与几何设计的贯通。
提示词示例:
基于现有的架构模型生成几何参数文档和Modelica仿真框架。
在已有架构模型的基础上连接Sysbuilder开始自动生成几何参数文档和Modelica仿真框架:
Tools
1. 会话准备与生命周期
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
start |
启动 Sysbuilder 工具 |
用于启动 Sysbuilder 并建立脚本连接。可直接传入 process_path 指向 Sysbuilder.exe,也可依赖安装脚本写入的默认路径。通常是显式会话管理的第一步;大多数建模调用中服务也会自动尝试启动或连接。 |
|
find |
查找会话工具 |
用于发现当前可连接的 Sysbuilder 实例及端口信息。适合排查 MCP 服务未附着进程的问题,也可用于多实例场景选择端口。 |
|
connect |
连接 Sysbuilder 工具 |
用于连接已启动的 Sysbuilder 实例。若未传入 port,会自动查找并连接可用实例,适合手动启动后接入 MCP。 |
|
exit |
关闭 Sysbuilder 工具 |
用于调用 Exit() 关闭当前连接的 Sysbuilder,仅作用于已连接会话,适合批处理完成后释放资源。 |
2. 脚本化建模与自动化
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
run_script |
建模脚本执行工具 |
用于执行 Sysbuilder Python 建模脚本,是自动化建模的核心入口。大模型需先生成完整脚本,再通过该工具执行建模操作。 |
3. 外部模型与需求导入
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
import_model |
模型导入工具 |
用于导入外部需求或模型文件,支持 Excel、ReqIF、XML。可自动识别或手动指定类型,适用于需求基线导入和模型迁移。 |
4. 模型生成与文档导出
|
工具英文名 |
工具中文描述 |
工具具体功能描述 |
|---|---|---|
|
generate_modelica_framework |
Modelica 框架生成工具 |
调用 GenerateModelicaSimulationFramework,根据模型生成 Modelica 仿真框架,支持向仿真侧延伸。 |
|
generate_system_design_report |
系统设计报告生成工具 |
调用 GenerateSystemDesignReport,基于模板生成系统设计报告,适用于评审与归档。 |
|
generate_geometric_param_doc |
几何参数文档生成工具 |
调用 GenGeometricParam,从模型中提取几何参数并生成 Markdown 文档,用于 CAD 或接口说明。 |
如何获取MWORKS MCP
MWORKS全套MCP现已正式上线,进入 MoHub-众创共享专区(https://mohub.net/sharing)即可下载
AI 与装备系统工程的融合,正在打开工程研发的新空间。随着工程知识、工具能力与智能体技术不断深入结合,未来的装备研发流程有望变得更加智能、高效与协同。期待以此次 MWORKS MCP Servers 开源上线为起点,与更多开发者、用户及生态伙伴一道,共同探索 AI 赋能装备系统工程的创新实践,推动装备研发加快迈向更高水平的智能化。
此外,MWORKS星火计划为所有用户和合作伙伴提供了开放的交流与协作平台。通过加入星火计划,您可以获取最新技术资讯、共享实践经验、参与功能扩展开发,与行业同行共同探索和推动工业软件创新。
诚邀您加入星火计划,利用开放的MCP和丰富的技术生态,共同推动工业系统设计与管理向更高效、更智能、更协同的方向发展。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 5
5 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)