永磁同步电机无位置传感器转子初始位置检测探索
永磁同步电机无位置传感器转子初始位置检测 1.正弦波信号注入实现PMSM转子初始位置检测,包括转子初始位置初次估计和极性判断; 2.提供仿真模型和参考文献,购买赠送PMSM控制相关电子资料
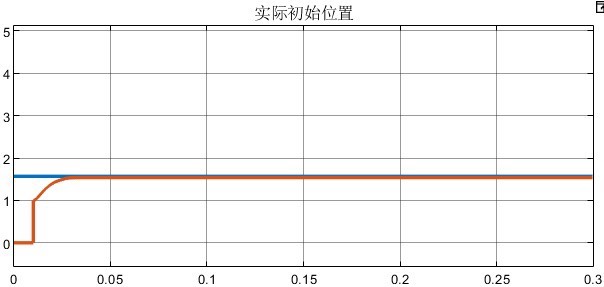
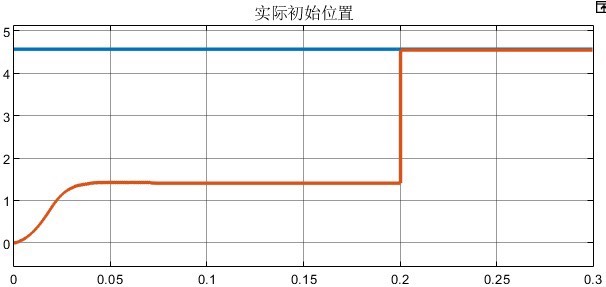
在永磁同步电机(PMSM)的控制领域,无位置传感器技术一直是研究热点,而其中转子初始位置检测更是关键的第一步。今天咱就来唠唠通过正弦波信号注入实现PMSM转子初始位置检测这一方法,它主要包含转子初始位置初次估计和极性判断两大部分。
正弦波信号注入实现转子初始位置初次估计
我们往电机的定子绕组里注入一个高频正弦波信号。为啥选正弦波呢?因为它特性比较好分析,容易通过电机的响应来获取我们想要的位置信息。
假设我们注入的正弦波电压信号表达式为:$V{h} = V{m}sin(\omega{h}t)$,这里$V{m}$是信号幅值,$\omega_{h}$是高频角频率。
在代码实现上,我们以基于MATLAB/Simulink的简单模型为例(当然实际应用会复杂得多)。
% 定义参数
Vm = 10; % 正弦波幅值
wh = 1000; % 高频角频率
t = 0:0.00001:0.1; % 时间向量
Vh = Vm*sin(wh*t); % 生成正弦波信号
% 绘制信号
figure;
plot(t, Vh);
xlabel('时间(s)');
ylabel('电压(V)');
title('注入的高频正弦波电压信号');这段代码就是简单地生成了我们要注入的高频正弦波信号,并把它绘制出来,方便我们观察。当这个信号注入到电机中后,电机的绕组会产生响应电流。通过对这个电流信号的分析,我们可以初步估计转子的位置。这里涉及到电机的数学模型,简单来说,电机绕组的电感会随着转子位置的变化而变化,而我们注入的高频信号就会因为这种电感变化产生不同的响应电流。
极性判断
在完成初次估计后,还得判断转子的极性。这一步也很重要,不然电机转起来方向可能就不对啦。一种常用的方法是基于磁链观测的极性判断。
永磁同步电机无位置传感器转子初始位置检测 1.正弦波信号注入实现PMSM转子初始位置检测,包括转子初始位置初次估计和极性判断; 2.提供仿真模型和参考文献,购买赠送PMSM控制相关电子资料
还是用代码来辅助理解一下。假设有一个简单的磁链观测模型代码片段:
% 假设的一些电机参数
Rs = 0.5; % 定子电阻
Ld = 0.01; % d轴电感
Lq = 0.01; % q轴电感
psi_f = 0.1; % 永磁体磁链
% 假设已经获取到的电流和电压信号(实际需要从硬件采集)
ia = [0.1 0.2 0.3 0.4]; % 相电流
va = [1 2 3 4]; % 相电压
% 磁链观测计算
psi_a = 0;
for k = 1:length(ia)
psi_a = psi_a + (va(k) - Rs*ia(k))*Ts; % Ts为采样时间
end
% 根据磁链值判断极性,这里只是简单示意,实际需更精确判断
if psi_a > 0
disp('转子极性为正');
else
disp('转子极性为负');
end这段代码简单地模拟了磁链观测的过程,并根据磁链值来初步判断转子的极性。实际应用中,要准确判断极性,还需要考虑很多实际因素,比如噪声干扰等。
仿真模型与参考文献
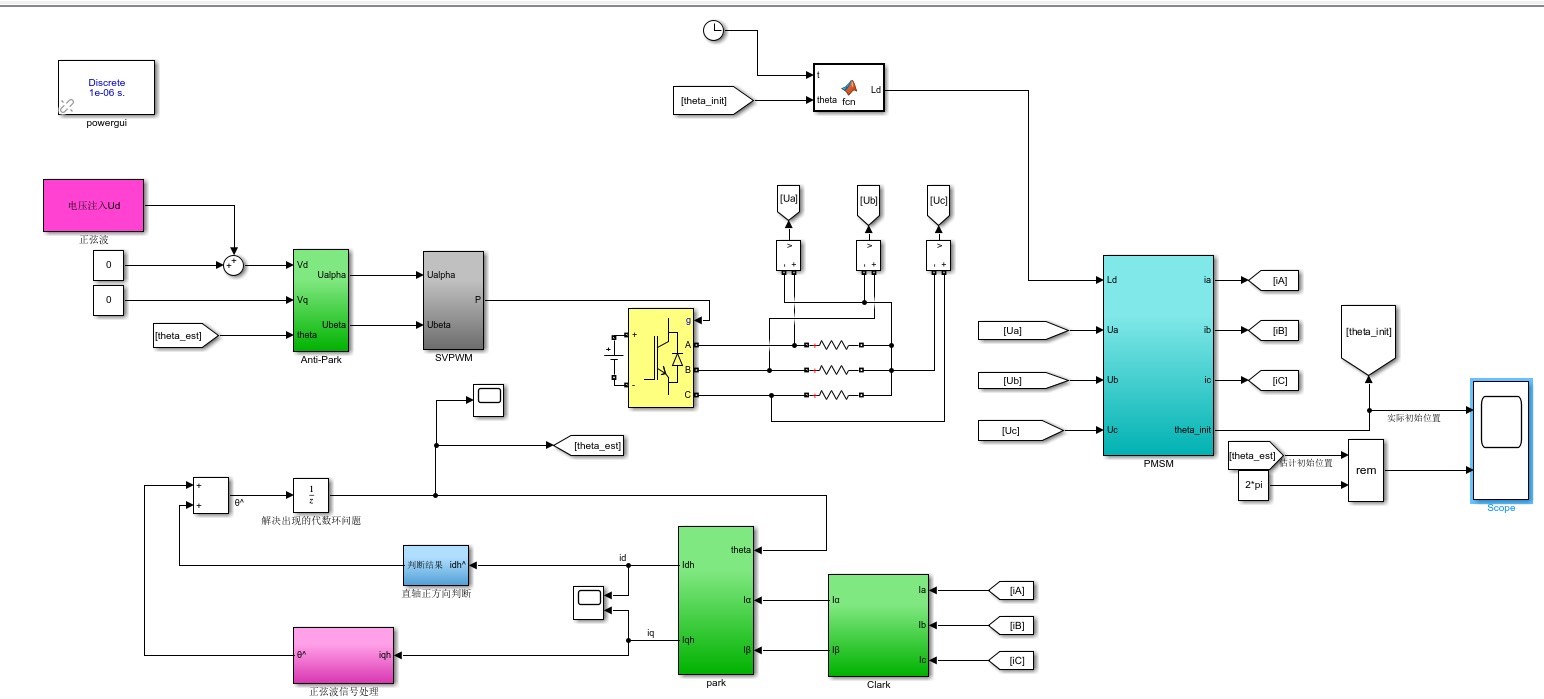
关于仿真模型,在MATLAB/Simulink里可以搭建一个较为完整的PMSM无位置传感器转子初始位置检测模型。从信号注入模块,到电流采集与处理模块,再到位置估计和极性判断模块,都可以通过各种标准的电气和控制模块搭建起来。这样就能在实际应用前,对整个算法进行验证和优化。
参考文献方面,《永磁同步电机无传感器控制技术》这本书对PMSM无位置传感器技术,包括转子初始位置检测,有很深入的理论和实践讲解。还有相关的IEEE论文,比如“High - Frequency Signal Injection Methods for Sensorless Control of Permanent - Magnet Synchronous Motors”,详细探讨了高频信号注入相关的技术细节。
如果大家对PMSM控制相关内容感兴趣,购买我们的资料包,将会获得包括详细代码、更多仿真模型以及各类PMSM控制电子资料,助力大家在这个领域深入探索。希望今天关于PMSM转子初始位置检测的分享,能给各位带来一些启发,一起在电机控制的世界里不断探索。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 5
5 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)