Carsim+Simulink 线控制动系统BBW-EMB联合仿真模型 【高还原可直接用!BBW-EMB线控制动联合仿真|Carsim+Simulink】 ✨ 核心仿真配置
Carsim+Simulink 线控制动系统BBW-EMB联合仿真模型
BBW-EMB线控制动联合仿真|Carsim+Simulink】
✨ 核心仿真配置
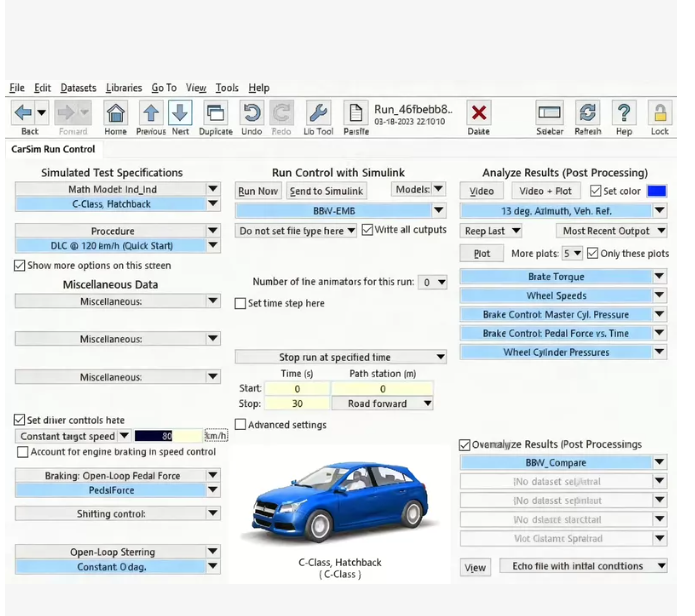
✅ 完整系统架构:包含制动力分配功能+四个车轮独立线控制动机构,贴合真实线控制动系统结构;
✅ 精准控制逻辑:四个车轮独立BLDCM三环PID闭环制动控制,最大程度还原线控制动系统的控制特性,仿真效果更贴合实际;
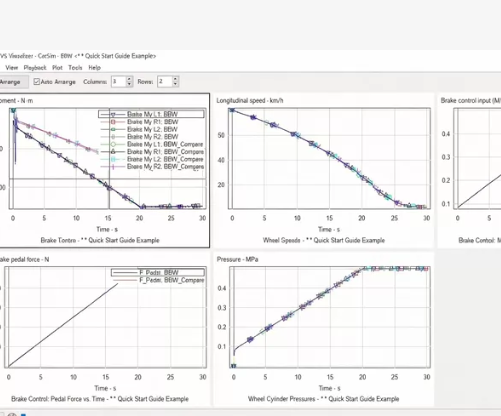
✅ 对比验证便捷:内置Carsim原有液压制动与本模型线控制动的对比模块,直观查看线控制动优势。
🔧 可自定义开发
-
踏板力模块:本模型未自定义踏板力模块,可根据自身需求自由设置,支持进一步开发优化,适配不同仿真场景;
-
制动力分配:采用Carsim自带分配方式,同时对该模块进行模块化设计,可直接使用,也可替换为自己设计的模块,开发自由度高;
-
ABS功能:模型暂未集成ABS功能,如需添加,可前往主页了解ABS相关模型,自行集成即可。
这是一个非常典型的汽车动力学与控制联合仿真场景。由于 Carsim 是商业闭源软件
MATLAB 初始化脚本 (Parameters.m)
在运行 Simulink 模型前,先运行此脚本以定义车辆参数、电机参数和 PID 增益。
%% 1. 初始化工作区
clear; clc; close all;
%% 2. 车辆与制动参数 (对应 Carsim 接口)
% 假设 Carsim 输出:Vehicle.Vx, Vehicle.w_fl, Vehicle.w_fr, Vehicle.w_rl, Vehicle.w_rr
Vehicle.Mass = 1500; % 整车质量 (kg)
Vehicle.g = 9.81; % 重力加速度
Vehicle.R_wheel = 0.3; % 轮胎滚动半径 (m)
Vehicle.mu_peak = 0.85; % 路面峰值附着系数
% 制动效能因数 (线控制动 EMB 特性)
EMB.Efficiency = 2500; % N/A (每安培电流产生的夹紧力)
EMB.Radius = 0.12; % 制动盘有效半径 (m)
%% 3. BLDCM 电机参数 (用于三环控制)
% 每个车轮一个电机
Motor.R = 0.05; % 相电阻 (Ohm)
Motor.L = 0.001; % 相电感 (H)
Motor.J = 0.0001; % 转动惯量
Motor.Kt = 0.1; % 转矩常数
Motor.PolePairs = 4; % 极对数
%% 4. PID 控制器增益 (三环控制)
% 电流环 (最快)
PID_I.Kp = 100; PID_I.Ki = 50;
% 速度环 (中间)
PID_W.Kp = 5; PID_W.Ki = 1;
% 力/位置环 (最外环,根据 Carsim 反馈的制动力或推杆位移)
PID_F.Kp = 2.0; PID_F.Ki = 0.5;
%% 5. 仿真时间
set_param(‘BBW_EMB_Cosim’, ‘StopTime’, ‘10’);
disp(‘参数加载完成,请打开 Simulink 模型运行。’);
Simulink 模型构建代码 (BuildModel.m)
function build_bbw_model()
modelName = ‘BBW_EMB_Cosim’;
new_system(modelName);
open_system(modelName);
%% --- 1. 添加 Carsim S-Function 接口 (模拟) ---
% 注意:实际使用时需替换为真实的 Carsim S-Function 模块
add_block('simulink/Sources/In1', [modelName '/Vx_In']);
set_param([modelName '/Vx_In'], 'Position', [50 50 80 70]);
add_block('simulink/Sources/In1', [modelName '/WheelSpeed_In']); % 假设四路输入打包
set_param([modelName '/WheelSpeed_In'], 'Position', [50 100 80 120]);
%% --- 2. 制动力分配模块 (Brake Force Distribution) ---
% 这是一个 MATLAB Function 模块,用于根据踏板力和车辆状态分配四轮目标力
add_block('simulink/User-Defined Functions/MATLAB Function', [modelName '/BFD_Logic']);
set_param([modelName '/BFD_Logic'], 'Position', [200 50 280 150]);
set_param([modelName '/BFD_Logic'], 'FunctionName', 'CalcBrakeForce');
% 写入默认代码
set_param([modelName '/BFD_Logic'], 'MATLABFunction', ...
['function [F_fl, F_fr, F_rl, F_rr] = CalcBrakeForce(PedalForce, Vx)', ...
'ratio = 0.6; % 前后轴分配比示例', ...
'F_total = PedalForce * 20; % 简单放大', ...
'F_fl = F_total * ratio * 0.5;', ...
'F_fr = F_total * ratio * 0.5;', ...
'F_rl = F_total * (1-ratio) * 0.5;', ...
'F_rr = F_total * (1-ratio) * 0.5;']);
%% --- 3. 创建 EMB 子系统模板 ---
% 创建一个子系统,内部包含 BLDC 三环控制
create_emb_subsystem(modelName);
%% --- 4. 实例化 4 个车轮的 EMB 控制器 ---
y_pos = [250, 350, 450, 550];
wheel_names = {'FL', 'FR', 'RL', 'RR'};
for i = 1:4
% 复制子系统
add_block('BBW_EMB_Cosim/EMB_Template', [modelName '/EMB_' wheel_names{i}]);
set_param([modelName '/EMB_' wheel_names{i}], 'Position', [400 y_pos(i)-40 550 y_pos(i)+40]);
% 连接信号 (简化连接逻辑)
% 这里省略了复杂的布线代码,实际需在Simulink中手动连接 BFD 输出到 EMB 输入
end
%% --- 5. 输出到 Carsim ---
add_block('simulink/Sinks/Out1', [modelName '/EMB_Forces_Out']);
set_param([modelName '/EMB_Forces_Out'], 'Position', [600 300 630 320]);
save_system(modelName);
disp(['模型 ' modelName ' 生成完毕。']);
end
%% 子函数:定义 EMB 内部结构
function create_emb_subsystem(parentModel)
subName = [parentModel ‘/EMB_Template’];
add_block(‘simulink/Commonly Used Blocks/Subsystem’, subName);
% 打开子系统编辑
open_system(subName);
% 输入: 目标力
add_block('simulink/Sources/In1', [subName '/Target_Force']);
set_param([subName '/Target_Force'], 'Position', [30 30 60 50]);
% 反馈: 实际力/位置 (来自电机模型)
add_block('simulink/Sources/In1', [subName '/Feedback']);
set_param([subName '/Feedback'], 'Position', [30 80 60 100]);
% 外环 PID (力控制)
add_block('simulink/Continuous/PID Controller', [subName '/PID_Force']);
set_param([subName '/PID_Force'], 'Position', [120 30 180 80]);
set_param([subName '/PID_Force'], 'P', 'PID_F.Kp'); % 调用工作区变量
set_param([subName '/PID_Force'], 'I', 'PID_F.Ki');
% 这里可以级联加入速度环和电流环 (结构同上)
% 输出: 电机驱动电压/电流
add_block('simulink/Sinks/Out1', [subName '/Motor_Command']);
set_param([subName '/Motor_Command'], 'Position', [250 30 280 50]);
close_system(subName);
end
核心控制算法代码 (MATLAB Function)
在你的 Simulink 模型中,你需要一个 MATLAB Function 模块来实现具体的 BLDC 三环控制逻辑。:
function [I_q_ref, Status] = EMB_ControlLogic(F_target, F_actual, w_motor, I_q_actual)
%#codegen
% EMB 三环控制核心逻辑
% 输入: F_target(目标夹紧力), F_actual(实际力), w_motor(电机转速), I_q_actual(实际电流)
% 输出: I_q_ref(电流环参考)
%% 1. 参数定义 (建议从 Workspace 传入)
persistent integrator_F integrator_W;
if isempty(integrator_F), integrator_F = 0; end
if isempty(integrator_W), integrator_W = 0; end
% 增益 (示例值)
Kp_F = 2.0; Ki_F = 0.1; % 力环
Kp_W = 0.5; Ki_W = 0.05;% 速度环
%% 2. 外环:力控制 (Force Loop)
% 计算力误差
err_F = F_target - F_actual;
% PI 控制 -> 输出为目标电机转速
integrator_F = integrator_F + err_F * 0.001; % 0.001 为采样时间 Ts
w_ref = Kp_F * err_F + Ki_F * integrator_F;
% 限幅
w_ref = max(min(w_ref, 500), -500);
%% 3. 中环:速度控制 (Speed Loop)
% 计算速度误差
err_W = w_ref - w_motor;
% PI 控制 -> 输出为目标电流 (转矩)
integrator_W = integrator_W + err_W * 0.001;
I_q_ref = Kp_W * err_W + Ki_W * integrator_W;
%% 4. 内环:电流环 (Current Loop)
% 在 Simulink 中通常用单独的 PID 模块实现,这里仅做简单限幅
I_q_ref = max(min(I_q_ref, 50), -50);
Status = 1; % 正常运行标志
end
使用说明
Carsim 设置:
在 Carsim 中,将制动系统类型设置为 “External” 或 “User-Defined”。
确保输出变量包含:Vx (车速), W_FL, W_FR, W_RL, W_RR (轮速)。
确保输入变量接收:Brake_Torque_FL 等四个车轮的制动扭矩。
Simulink 设置:
运行 Parameters.m 加载参数。
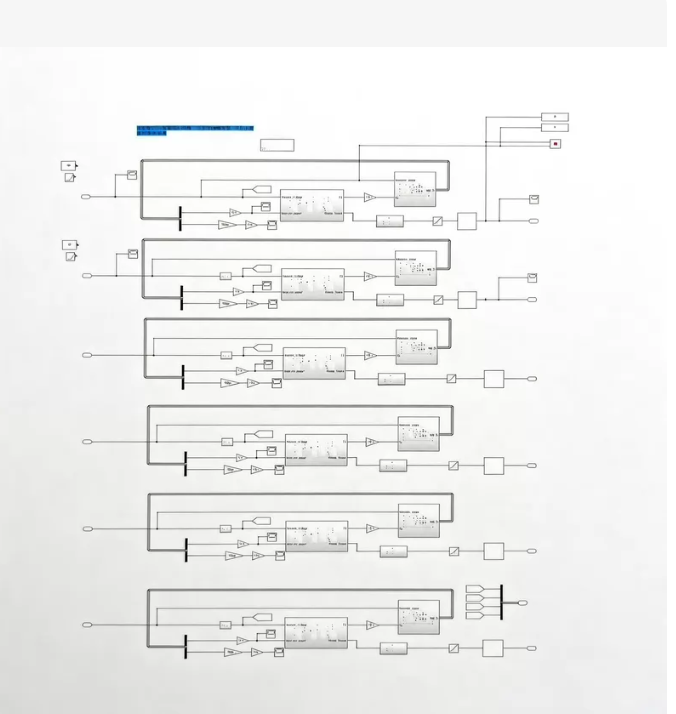
非常典型的 BLDC(无刷直流电机)或 PMSM(永磁同步电机)矢量控制(FOC) 的 Simulink 子系统结构,通常用于 电子机械制动(EMB) 的精确力矩控制。
图中有 6 个类似的并联通道,这对应了你提到的 “四个车轮独立线控制动”(可能包含额外的辅助控制或冗余通道)。每个通道内部包含了 电流环、速度环、位置环(或力矩环) 的级联控制结构,以及 PWM 逆变桥 和 电机本体。
Simulink 模型
这段代码会创建一个名为 EMB_Motor_Control_System 的模型,
function generate_emb_model()
% 1. 定义模型名称
modelName = ‘EMB_Motor_Control_System’;
new_system(modelName, ‘Model’);
open_system(modelName);
% 2. 定义车轮名称
wheels = {'FL', 'FR', 'RL', 'RR'}; % 前左、前右、后左、后右
yPos = 50; % 初始垂直位置
spacing = 120; % 模块间距
% 3. 循环创建4个车轮的独立控制通道
for i = 1:length(wheels)
wheel = wheels{i};
subsystemName = [wheel '_EMB_Controller'];
% --- 创建子系统 ---
add_block('simulink/Ports & Subsystems/Subsystem', ...
[modelName '/' subsystemName], ...
'Position', [100, yPos, 500, yPos+100]);
% --- 在子系统内部搭建结构 (简化版对应图中逻辑) ---
open_system([modelName '/' subsystemName]);
% 3.1 添加输入端口 (目标力矩/位置, 反馈电流, 反馈位置)
add_block('simulink/Sources/In1', 'In_Target', 'Position', [10 10 30 30]);
add_block('simulink/Sources/In1', 'In_Current', 'Position', [10 40 30 60]);
add_block('simulink/Sources/In1', 'In_Position', 'Position', [10 70 30 90]);
% 3.2 添加 PID 控制器 (对应图中的三环控制)
% 这里仅演示一个通用的 PID 模块
add_block('simulink/Continuous/PID Controller', 'PID_Ctrl', ...
'Position', [80 30 130 80]);
% 3.3 添加 PWM 逆变桥 (Universal Bridge)
add_block('simulink/Simscape/Electrical/Specialized Power Systems/Power Electronics/Universal Bridge', 'Inverter', ...
'Position', [180 30 230 80]);
% 3.4 添加电机模型 (Permanent Magnet Synchronous Motor)
add_block('simulink/Simscape/Electrical/Specialized Power Systems/Machines/Permanent Magnet Synchronous Motor', 'Motor', ...
'Position', [280 30 330 80]);
% 3.5 添加输出端口
add_block('simulink/Sinks/Out1', 'Out_Speed', 'Position', [380 30 400 50]);
add_block('simulink/Sinks/Out1', 'Out_Current', 'Position', [380 60 400 80]);
% 自动连线 (简单逻辑)
add_line([modelName '/' subsystemName], 'In_Target/1', 'PID_Ctrl/1');
add_line([modelName '/' subsystemName], 'PID_Ctrl/1', 'Inverter/1');
add_line([modelName '/' subsystemName], 'Inverter/1', 'Motor/1');
add_line([modelName '/' subsystemName], 'Motor/1', 'Out_Speed/1');
close_system([modelName '/' subsystemName]);
% 更新下一个通道的位置
yPos = yPos + spacing;
end
% 4. 添加顶层逻辑 (制动力分配)
add_block('simulink/Commonly Used Blocks/Sum', [modelName '/Force_Distribution'], ...
'Position', [30 30 60 60], 'Inputs', '++++');
% 5. 保存并打开模型
save_system(modelName);
disp(['模型 ' modelName ' 生成完毕!']);
end
代码对应的模型结构解析
输入端:接收来自 Carsim 的制动指令(如目标夹紧力)和传感器反馈(电流、转子位置)。
三环控制:
位置/力环(外环):根据目标夹紧力和实际夹紧力的误差,输出目标转速。
速度环(中环):根据目标转速和电机实际转速的误差,输出目标电流(转矩)。
电流环(内环):这是图中最复杂的部分,通常包含 Clark Transform -> Park Transform -> PI Controller -> Inverse Park -> PWM Generator。
功率级:Universal Bridge 模块,将控制信号转换为三相电压驱动电机。
电机本体:PMSM 或 BLDC 模块,输出实际转矩和转速。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 25
25 0
0- 0



 已为社区贡献53条内容
已为社区贡献53条内容

所有评论(0)