YOLO26改进 | 主干网络 | 平衡局部卷积与全局注意力细节
💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡
本文给大家带来的教程是将YOLO26的主干替换为NextViT 来提取特征。文章在介绍主要的原理后,将手把手教学如何进行模块的代码添加和修改,并将修改后的完整代码放在文章的最后,方便大家一键运行,小白也可轻松上手实践。以帮助您更好地学习深度学习目标检测YOLO系列的挑战。
目录
1.论文
官方代码:官方代码仓库点击即可跳转
2. NextViT代码实现
2.1 将NextViT 添加到YOLO26中
关键步骤一:在ultralytics\ultralytics\nn\modules下面新建文件夹models,在文件夹下新建NextViT.py,粘贴下面代码
# Copyright (c) ByteDance Inc. All rights reserved.
from functools import partial
import numpy as np
import torch
import torch.utils.checkpoint as checkpoint
from einops import rearrange
from timm.models.layers import DropPath, trunc_normal_
from torch import nn
__all__ = ['nextvit_small', 'nextvit_base', 'nextvit_large']
NORM_EPS = 1e-5
class ConvBNReLU(nn.Module):
def __init__(
self,
in_channels,
out_channels,
kernel_size,
stride,
groups=1):
super(ConvBNReLU, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=kernel_size, stride=stride,
padding=1, groups=groups, bias=False)
self.norm = nn.BatchNorm2d(out_channels, eps=NORM_EPS)
self.act = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.norm(x)
x = self.act(x)
return x
def _make_divisible(v, divisor, min_value=None):
if min_value is None:
min_value = divisor
new_v = max(min_value, int(v + divisor / 2) // divisor * divisor)
# Make sure that round down does not go down by more than 10%.
if new_v < 0.9 * v:
new_v += divisor
return new_v
class PatchEmbed(nn.Module):
def __init__(self,
in_channels,
out_channels,
stride=1):
super(PatchEmbed, self).__init__()
norm_layer = partial(nn.BatchNorm2d, eps=NORM_EPS)
if stride == 2:
self.avgpool = nn.AvgPool2d((2, 2), stride=2, ceil_mode=True, count_include_pad=False)
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, bias=False)
self.norm = norm_layer(out_channels)
elif in_channels != out_channels:
self.avgpool = nn.Identity()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, bias=False)
self.norm = norm_layer(out_channels)
else:
self.avgpool = nn.Identity()
self.conv = nn.Identity()
self.norm = nn.Identity()
def forward(self, x):
return self.norm(self.conv(self.avgpool(x)))
class MHCA(nn.Module):
"""
Multi-Head Convolutional Attention
"""
def __init__(self, out_channels, head_dim):
super(MHCA, self).__init__()
norm_layer = partial(nn.BatchNorm2d, eps=NORM_EPS)
self.group_conv3x3 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1,
padding=1, groups=out_channels // head_dim, bias=False)
self.norm = norm_layer(out_channels)
self.act = nn.ReLU(inplace=True)
self.projection = nn.Conv2d(out_channels, out_channels, kernel_size=1, bias=False)
def forward(self, x):
out = self.group_conv3x3(x)
out = self.norm(out)
out = self.act(out)
out = self.projection(out)
return out
class Mlp(nn.Module):
def __init__(self, in_features, out_features=None, mlp_ratio=None, drop=0., bias=True):
super().__init__()
out_features = out_features or in_features
hidden_dim = _make_divisible(in_features * mlp_ratio, 32)
self.conv1 = nn.Conv2d(in_features, hidden_dim, kernel_size=1, bias=bias)
self.act = nn.ReLU(inplace=True)
self.conv2 = nn.Conv2d(hidden_dim, out_features, kernel_size=1, bias=bias)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.conv1(x)
x = self.act(x)
x = self.drop(x)
x = self.conv2(x)
x = self.drop(x)
return x
class NCB(nn.Module):
"""
Next Convolution Block
"""
def __init__(self, in_channels, out_channels, stride=1, path_dropout=0,
drop=0, head_dim=32, mlp_ratio=3):
super(NCB, self).__init__()
self.in_channels = in_channels
self.out_channels = out_channels
norm_layer = partial(nn.BatchNorm2d, eps=NORM_EPS)
assert out_channels % head_dim == 0
self.patch_embed = PatchEmbed(in_channels, out_channels, stride)
self.mhca = MHCA(out_channels, head_dim)
self.attention_path_dropout = DropPath(path_dropout)
self.norm = norm_layer(out_channels)
self.mlp = Mlp(out_channels, mlp_ratio=mlp_ratio, drop=drop, bias=True)
self.mlp_path_dropout = DropPath(path_dropout)
self.is_bn_merged = False
def forward(self, x):
x = self.patch_embed(x)
x = x + self.attention_path_dropout(self.mhca(x))
if not torch.onnx.is_in_onnx_export() and not self.is_bn_merged:
out = self.norm(x)
else:
out = x
x = x + self.mlp_path_dropout(self.mlp(out))
return x
class E_MHSA(nn.Module):
"""
Efficient Multi-Head Self Attention
"""
def __init__(self, dim, out_dim=None, head_dim=32, qkv_bias=True, qk_scale=None,
attn_drop=0, proj_drop=0., sr_ratio=1):
super().__init__()
self.dim = dim
self.out_dim = out_dim if out_dim is not None else dim
self.num_heads = self.dim // head_dim
self.scale = qk_scale or head_dim ** -0.5
self.q = nn.Linear(dim, self.dim, bias=qkv_bias)
self.k = nn.Linear(dim, self.dim, bias=qkv_bias)
self.v = nn.Linear(dim, self.dim, bias=qkv_bias)
self.proj = nn.Linear(self.dim, self.out_dim)
self.attn_drop = nn.Dropout(attn_drop)
self.proj_drop = nn.Dropout(proj_drop)
self.sr_ratio = sr_ratio
self.N_ratio = sr_ratio ** 2
if sr_ratio > 1:
self.sr = nn.AvgPool1d(kernel_size=self.N_ratio, stride=self.N_ratio)
self.norm = nn.BatchNorm1d(dim, eps=NORM_EPS)
self.is_bn_merged = False
def forward(self, x):
B, N, C = x.shape
q = self.q(x)
q = q.reshape(B, N, self.num_heads, int(C // self.num_heads)).permute(0, 2, 1, 3)
if self.sr_ratio > 1:
x_ = x.transpose(1, 2)
x_ = self.sr(x_)
if not torch.onnx.is_in_onnx_export() and not self.is_bn_merged:
x_ = self.norm(x_)
x_ = x_.transpose(1, 2)
k = self.k(x_)
k = k.reshape(B, -1, self.num_heads, int(C // self.num_heads)).permute(0, 2, 3, 1)
v = self.v(x_)
v = v.reshape(B, -1, self.num_heads, int(C // self.num_heads)).permute(0, 2, 1, 3)
else:
k = self.k(x)
k = k.reshape(B, -1, self.num_heads, int(C // self.num_heads)).permute(0, 2, 3, 1)
v = self.v(x)
v = v.reshape(B, -1, self.num_heads, int(C // self.num_heads)).permute(0, 2, 1, 3)
attn = (q @ k) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
class NTB(nn.Module):
"""
Next Transformer Block
"""
def __init__(
self, in_channels, out_channels, path_dropout, stride=1, sr_ratio=1,
mlp_ratio=2, head_dim=32, mix_block_ratio=0.75, attn_drop=0, drop=0,
):
super(NTB, self).__init__()
self.in_channels = in_channels
self.out_channels = out_channels
self.mix_block_ratio = mix_block_ratio
norm_func = partial(nn.BatchNorm2d, eps=NORM_EPS)
self.mhsa_out_channels = _make_divisible(int(out_channels * mix_block_ratio), 32)
self.mhca_out_channels = out_channels - self.mhsa_out_channels
self.patch_embed = PatchEmbed(in_channels, self.mhsa_out_channels, stride)
self.norm1 = norm_func(self.mhsa_out_channels)
self.e_mhsa = E_MHSA(self.mhsa_out_channels, head_dim=head_dim, sr_ratio=sr_ratio,
attn_drop=attn_drop, proj_drop=drop)
self.mhsa_path_dropout = DropPath(path_dropout * mix_block_ratio)
self.projection = PatchEmbed(self.mhsa_out_channels, self.mhca_out_channels, stride=1)
self.mhca = MHCA(self.mhca_out_channels, head_dim=head_dim)
self.mhca_path_dropout = DropPath(path_dropout * (1 - mix_block_ratio))
self.norm2 = norm_func(out_channels)
self.mlp = Mlp(out_channels, mlp_ratio=mlp_ratio, drop=drop)
self.mlp_path_dropout = DropPath(path_dropout)
self.is_bn_merged = False
def forward(self, x):
x = self.patch_embed(x)
B, C, H, W = x.shape
if not torch.onnx.is_in_onnx_export() and not self.is_bn_merged:
out = self.norm1(x)
else:
out = x
out = rearrange(out, "b c h w -> b (h w) c") # b n c
out = self.mhsa_path_dropout(self.e_mhsa(out))
x = x + rearrange(out, "b (h w) c -> b c h w", h=H)
out = self.projection(x)
out = out + self.mhca_path_dropout(self.mhca(out))
x = torch.cat([x, out], dim=1)
if not torch.onnx.is_in_onnx_export() and not self.is_bn_merged:
out = self.norm2(x)
else:
out = x
x = x + self.mlp_path_dropout(self.mlp(out))
return x
class NextViT(nn.Module):
def __init__(self, stem_chs, depths, path_dropout, attn_drop=0, drop=0, num_classes=1000,
strides=[1, 2, 2, 2], sr_ratios=[8, 4, 2, 1], head_dim=32, mix_block_ratio=0.75,
use_checkpoint=False):
super(NextViT, self).__init__()
self.use_checkpoint = use_checkpoint
self.stage_out_channels = [[96] * (depths[0]),
[192] * (depths[1] - 1) + [256],
[384, 384, 384, 384, 512] * (depths[2] // 5),
[768] * (depths[3] - 1) + [1024]]
# Next Hybrid Strategy
self.stage_block_types = [[NCB] * depths[0],
[NCB] * (depths[1] - 1) + [NTB],
[NCB, NCB, NCB, NCB, NTB] * (depths[2] // 5),
[NCB] * (depths[3] - 1) + [NTB]]
self.stem = nn.Sequential(
ConvBNReLU(3, stem_chs[0], kernel_size=3, stride=2),
ConvBNReLU(stem_chs[0], stem_chs[1], kernel_size=3, stride=1),
ConvBNReLU(stem_chs[1], stem_chs[2], kernel_size=3, stride=1),
ConvBNReLU(stem_chs[2], stem_chs[2], kernel_size=3, stride=2),
)
input_channel = stem_chs[-1]
features = []
idx = 0
dpr = [x.item() for x in torch.linspace(0, path_dropout, sum(depths))] # stochastic depth decay rule
for stage_id in range(len(depths)):
numrepeat = depths[stage_id]
output_channels = self.stage_out_channels[stage_id]
block_types = self.stage_block_types[stage_id]
for block_id in range(numrepeat):
if strides[stage_id] == 2 and block_id == 0:
stride = 2
else:
stride = 1
output_channel = output_channels[block_id]
block_type = block_types[block_id]
if block_type is NCB:
layer = NCB(input_channel, output_channel, stride=stride, path_dropout=dpr[idx + block_id],
drop=drop, head_dim=head_dim)
features.append(layer)
elif block_type is NTB:
layer = NTB(input_channel, output_channel, path_dropout=dpr[idx + block_id], stride=stride,
sr_ratio=sr_ratios[stage_id], head_dim=head_dim, mix_block_ratio=mix_block_ratio,
attn_drop=attn_drop, drop=drop)
features.append(layer)
input_channel = output_channel
idx += numrepeat
self.features = nn.Sequential(*features)
self.norm = nn.BatchNorm2d(output_channel, eps=NORM_EPS)
self.stage_out_idx = [sum(depths[:idx + 1]) - 1 for idx in range(len(depths))]
self.width_list = [i.size(1) for i in self.forward(torch.randn(1, 3, 640, 640))]
self._initialize_weights()
def _initialize_weights(self):
for n, m in self.named_modules():
if isinstance(m, (nn.BatchNorm2d, nn.GroupNorm, nn.LayerNorm, nn.BatchNorm1d)):
nn.init.constant_(m.weight, 1.0)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
trunc_normal_(m.weight, std=.02)
if hasattr(m, 'bias') and m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Conv2d):
trunc_normal_(m.weight, std=.02)
if hasattr(m, 'bias') and m.bias is not None:
nn.init.constant_(m.bias, 0)
def forward(self, x):
res = []
x = self.stem(x)
for idx, layer in enumerate(self.features):
if self.use_checkpoint:
x = checkpoint.checkpoint(layer, x)
else:
x = layer(x)
if idx in self.stage_out_idx:
res.append(x)
res[-1] = self.norm(res[-1])
return res
def update_weight(model_dict, weight_dict):
idx, temp_dict = 0, {}
for k, v in weight_dict.items():
if k in model_dict.keys() and np.shape(model_dict[k]) == np.shape(v):
temp_dict[k] = v
idx += 1
model_dict.update(temp_dict)
print(f'loading weights... {idx}/{len(model_dict)} items')
return model_dict
def nextvit_small(weights=''):
model = NextViT(stem_chs=[64, 32, 64], depths=[3, 4, 10, 3], path_dropout=0.1)
if weights:
pretrained_weight = torch.load(weights)['model']
model.load_state_dict(update_weight(model.state_dict(), pretrained_weight))
return model
def nextvit_base(weights=''):
model = NextViT(stem_chs=[64, 32, 64], depths=[3, 4, 20, 3], path_dropout=0.2)
if weights:
pretrained_weight = torch.load(weights)['model']
model.load_state_dict(update_weight(model.state_dict(), pretrained_weight))
return model
def nextvit_large(weights=''):
model = NextViT(stem_chs=[64, 32, 64], depths=[3, 4, 30, 3], path_dropout=0.2)
if weights:
pretrained_weight = torch.load(weights)['model']
model.load_state_dict(update_weight(model.state_dict(), pretrained_weight))
return model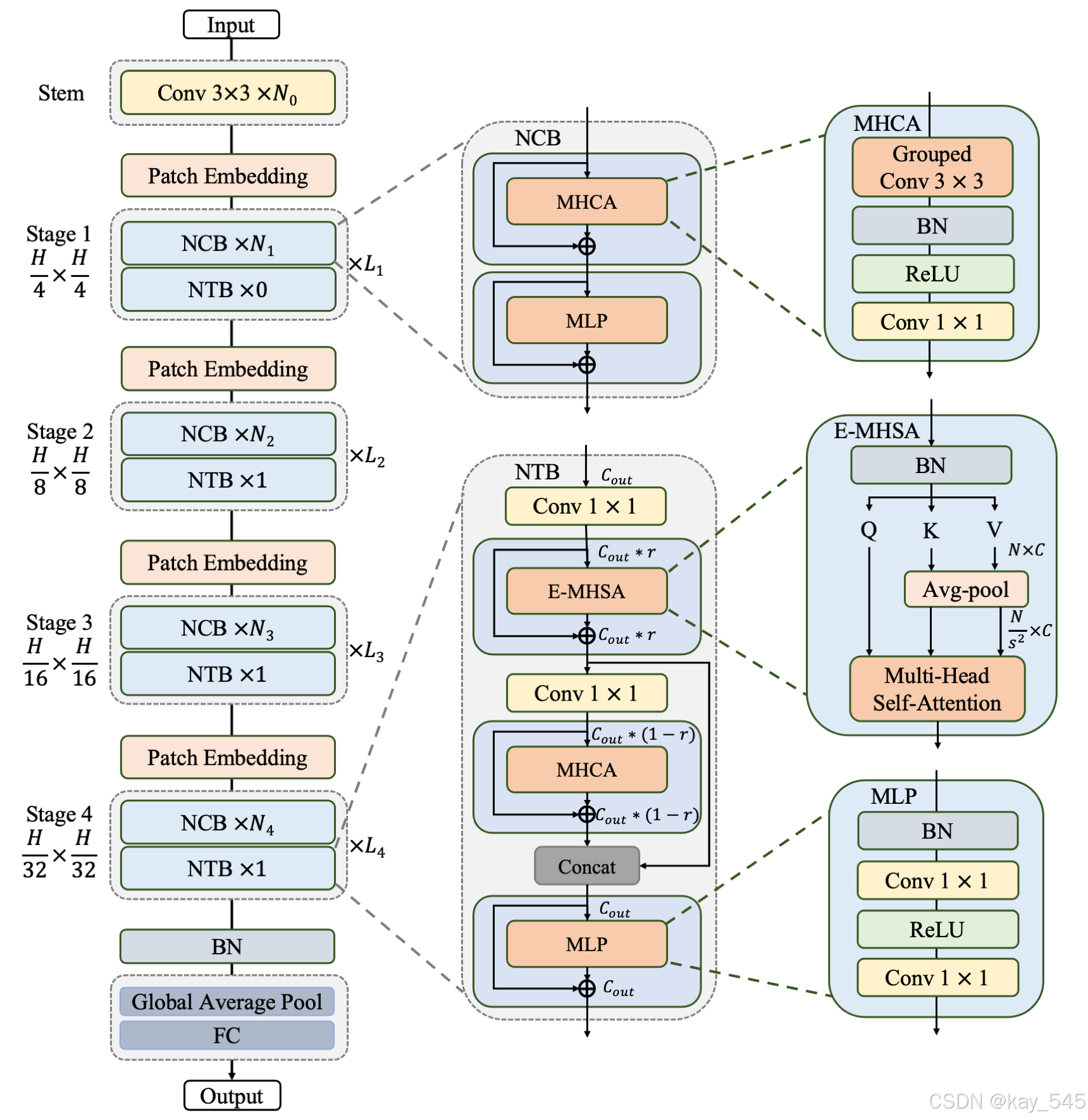
2.2 更改init.py文件
关键步骤二:在文件ultralytics\ultralytics\nn\modules\models文件夹下新建__init__.py文件,先导入函数
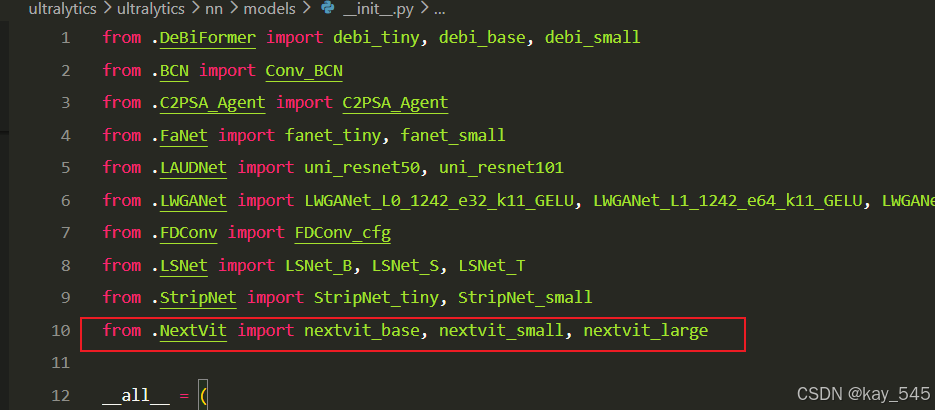
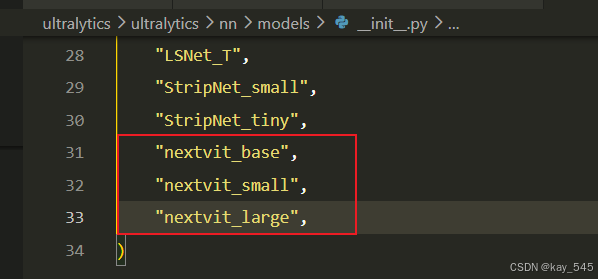
然后在下面的__all__中声明函数
2.3 添加yaml文件
关键步骤三:在/ultralytics/ultralytics/cfg/models/26下面新建文件yolo26_NextViT.yaml文件,粘贴下面的内容
- 目标检测
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Ultralytics YOLO26 object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/yolo26
# Task docs: https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
end2end: True # whether to use end-to-end mode
reg_max: 1 # DFL bins
scales: # model compound scaling constants, i.e. 'model=yolo26n.yaml' will call yolo26.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 260 layers, 2,572,280 parameters, 2,572,280 gradients, 6.1 GFLOPs
s: [0.50, 0.50, 1024] # summary: 260 layers, 10,009,784 parameters, 10,009,784 gradients, 22.8 GFLOPs
m: [0.50, 1.00, 512] # summary: 280 layers, 21,896,248 parameters, 21,896,248 gradients, 75.4 GFLOPs
l: [1.00, 1.00, 512] # summary: 392 layers, 26,299,704 parameters, 26,299,704 gradients, 93.8 GFLOPs
x: [1.00, 1.50, 512] # summary: 392 layers, 58,993,368 parameters, 58,993,368 gradients, 209.5 GFLOPs
# YOLO26n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, nextvit_small, []]
- [-1, 1, SPPF, [1024, 5]] # 5
- [-1, 2, C2PSA, [1024]] # 6
# YOLO26n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 3], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2, [512, False]] # 9
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 2], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2, [256, False]] # 12 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2, [512, False]] # 15 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 6], 1, Concat, [1]] # cat head P5
- [-1, 2, C3k2, [1024, True]] # 18 (P5/32-large)
- [[12, 15, 18], 1, Detect, [nc]] # Detect(P3, P4, P5)- 语义分割
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Ultralytics YOLO26 object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/yolo26
# Task docs: https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
end2end: True # whether to use end-to-end mode
reg_max: 1 # DFL bins
scales: # model compound scaling constants, i.e. 'model=yolo26n.yaml' will call yolo26.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 260 layers, 2,572,280 parameters, 2,572,280 gradients, 6.1 GFLOPs
s: [0.50, 0.50, 1024] # summary: 260 layers, 10,009,784 parameters, 10,009,784 gradients, 22.8 GFLOPs
m: [0.50, 1.00, 512] # summary: 280 layers, 21,896,248 parameters, 21,896,248 gradients, 75.4 GFLOPs
l: [1.00, 1.00, 512] # summary: 392 layers, 26,299,704 parameters, 26,299,704 gradients, 93.8 GFLOPs
x: [1.00, 1.50, 512] # summary: 392 layers, 58,993,368 parameters, 58,993,368 gradients, 209.5 GFLOPs
# YOLO26n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, nextvit_small, []]
- [-1, 1, SPPF, [1024, 5]] # 5
- [-1, 2, C2PSA, [1024]] # 6
# YOLO26n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 3], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2, [512, False]] # 9
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 2], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2, [256, False]] # 12 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2, [512, False]] # 15 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 6], 1, Concat, [1]] # cat head P5
- [-1, 2, C3k2, [1024, True]] # 18 (P5/32-large)
- [[12, 15, 18], 1, Segment, [nc, 32, 256]]- 旋转目标检测
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Ultralytics YOLO26 object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/yolo26
# Task docs: https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
end2end: True # whether to use end-to-end mode
reg_max: 1 # DFL bins
scales: # model compound scaling constants, i.e. 'model=yolo26n.yaml' will call yolo26.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 260 layers, 2,572,280 parameters, 2,572,280 gradients, 6.1 GFLOPs
s: [0.50, 0.50, 1024] # summary: 260 layers, 10,009,784 parameters, 10,009,784 gradients, 22.8 GFLOPs
m: [0.50, 1.00, 512] # summary: 280 layers, 21,896,248 parameters, 21,896,248 gradients, 75.4 GFLOPs
l: [1.00, 1.00, 512] # summary: 392 layers, 26,299,704 parameters, 26,299,704 gradients, 93.8 GFLOPs
x: [1.00, 1.50, 512] # summary: 392 layers, 58,993,368 parameters, 58,993,368 gradients, 209.5 GFLOPs
# YOLO26n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, nextvit_small, []]
- [-1, 1, SPPF, [1024, 5]] # 5
- [-1, 2, C2PSA, [1024]] # 6
# YOLO26n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 3], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2, [512, False]] # 9
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 2], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2, [256, False]] # 12 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2, [512, False]] # 15 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 6], 1, Concat, [1]] # cat head P5
- [-1, 2, C3k2, [1024, True]] # 18 (P5/32-large)
- [[12, 15, 18], 1, OBB, [nc, 1]]温馨提示:本文只是对yolo26基础上添加模块,如果要对yolo26 n/l/m/x进行添加则只需要指定对应的depth_multiple 和 width_multiple
end2end: True # whether to use end-to-end mode
reg_max: 1 # DFL bins
scales: # model compound scaling constants, i.e. 'model=yolo26n.yaml' will call yolo26.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 260 layers, 2,572,280 parameters, 2,572,280 gradients, 6.1 GFLOPs
s: [0.50, 0.50, 1024] # summary: 260 layers, 10,009,784 parameters, 10,009,784 gradients, 22.8 GFLOPs
m: [0.50, 1.00, 512] # summary: 280 layers, 21,896,248 parameters, 21,896,248 gradients, 75.4 GFLOPs
l: [1.00, 1.00, 512] # summary: 392 layers, 26,299,704 parameters, 26,299,704 gradients, 93.8 GFLOPs
x: [1.00, 1.50, 512] # summary: 392 layers, 58,993,368 parameters, 58,993,368 gradients, 209.5 GFLOPs2.4 在task.py中进行注册
关键步骤四:在parse_model函数中进行注册,添加NextViT
先在task.py导入函数

然后在task.py文件下找到parse_model这个函数,如下图,添加NextViT
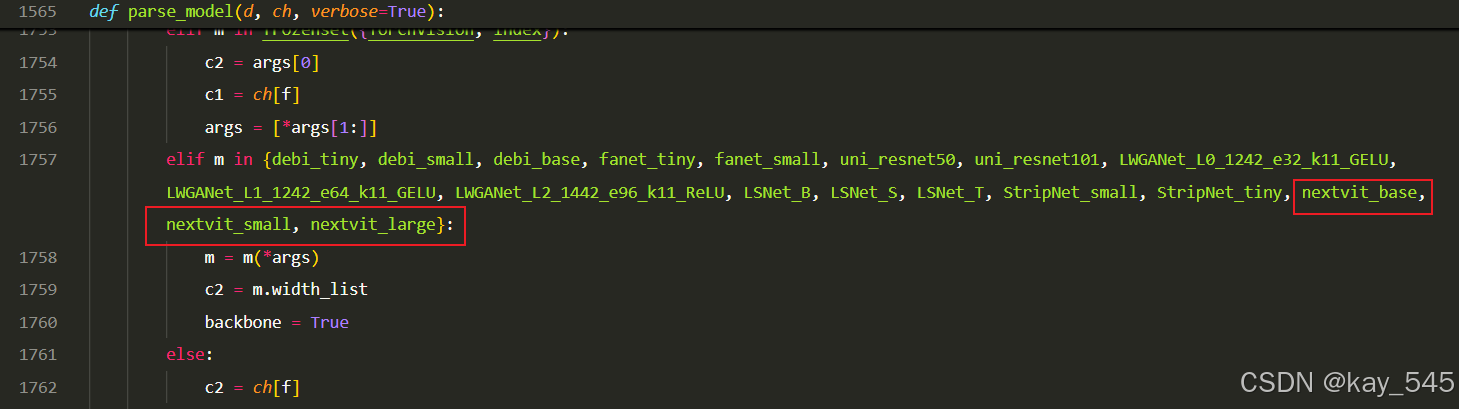
elif m in {nextvit_base, nextvit_small, nextvit_large}:
m = m(*args)
c2 = m.width_list
backbone = True
else:
c2 = ch[f]2.5 执行程序
关键步骤五: 在ultralytics文件中新建train.py,将model的参数路径设置为yolo26_NextViT .yaml的路径即可 【注意是在外边的Ultralytics下新建train.py】
from ultralytics import YOLO
import warnings
warnings.filterwarnings('ignore')
from pathlib import Path
if __name__ == '__main__':
# 加载模型
model = YOLO("ultralytics/cfg/26/yolo26.yaml") # 你要选择的模型yaml文件地址
# Use the model
results = model.train(data=r"你的数据集的yaml文件地址",
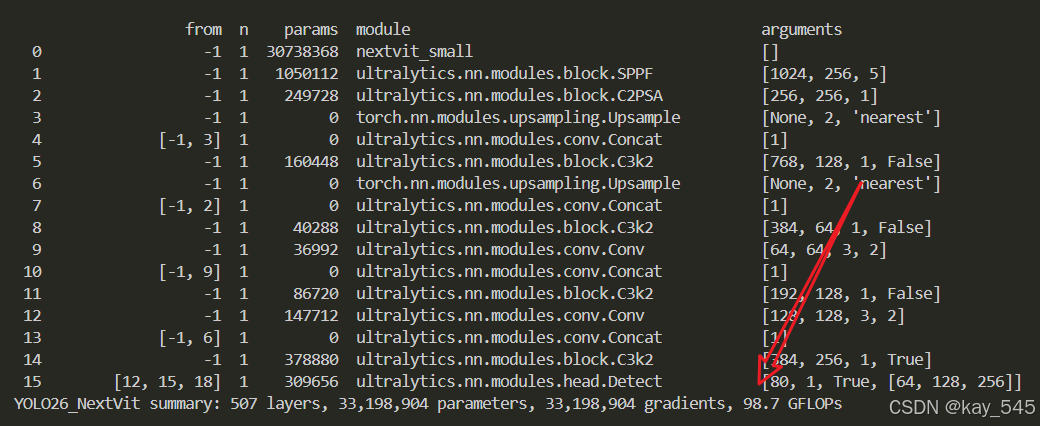
epochs=100, batch=16, imgsz=640, workers=4, name=Path(model.cfg).stem) # 训练模型🚀运行程序,如果出现下面的内容则说明添加成功🚀
from n params module arguments
0 -1 1 30738368 nextvit_small []
1 -1 1 1050112 ultralytics.nn.modules.block.SPPF [1024, 256, 5]
2 -1 1 249728 ultralytics.nn.modules.block.C2PSA [256, 256, 1]
3 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
4 [-1, 3] 1 0 ultralytics.nn.modules.conv.Concat [1]
5 -1 1 160448 ultralytics.nn.modules.block.C3k2 [768, 128, 1, False]
6 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
7 [-1, 2] 1 0 ultralytics.nn.modules.conv.Concat [1]
8 -1 1 40288 ultralytics.nn.modules.block.C3k2 [384, 64, 1, False]
9 -1 1 36992 ultralytics.nn.modules.conv.Conv [64, 64, 3, 2]
10 [-1, 9] 1 0 ultralytics.nn.modules.conv.Concat [1]
11 -1 1 86720 ultralytics.nn.modules.block.C3k2 [192, 128, 1, False]
12 -1 1 147712 ultralytics.nn.modules.conv.Conv [128, 128, 3, 2]
13 [-1, 6] 1 0 ultralytics.nn.modules.conv.Concat [1]
14 -1 1 378880 ultralytics.nn.modules.block.C3k2 [384, 256, 1, True]
15 [12, 15, 18] 1 309656 ultralytics.nn.modules.head.Detect [80, 1, True, [64, 128, 256]]
YOLO26_NextVit summary: 507 layers, 33,198,904 parameters, 33,198,904 gradients, 98.7 GFLOPs3. 完整代码分享
主页侧边
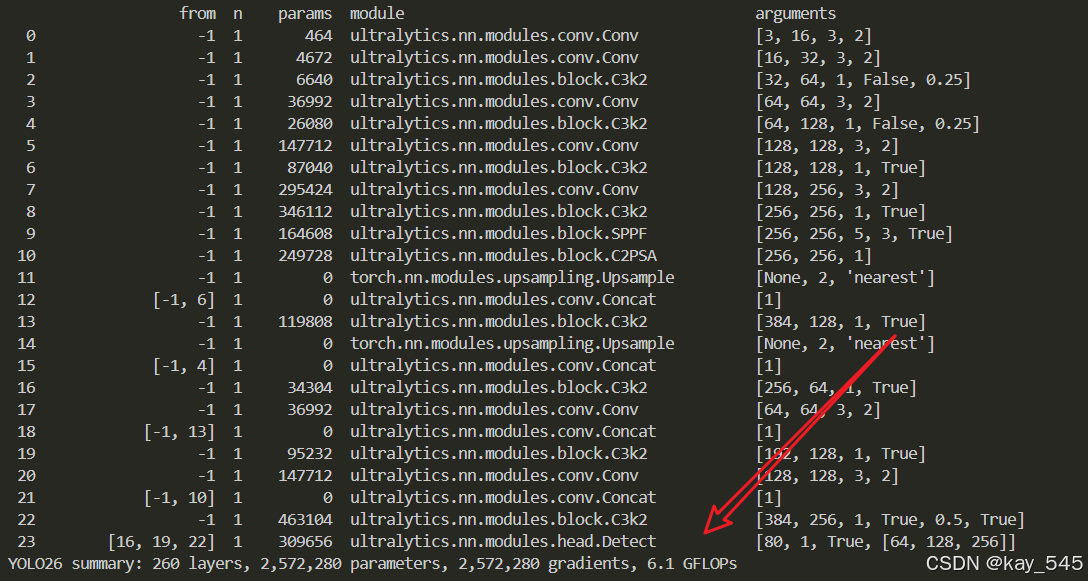
4. GFLOPs
关于GFLOPs的计算方式可以查看:百面算法工程师 | 卷积基础知识——Convolution
未改进的YOLO26n GFLOPs
改进后的GFLOPs
5. 进阶
可以与其他的注意力机制或者损失函数等结合,进一步提升检测效果
6.总结
通过以上的改进方法,我们成功提升了模型的表现。这只是一个开始,未来还有更多优化和技术深挖的空间。在这里,我想隆重向大家推荐我的专栏——<专栏地址:YOLO26改进-论文涨点——点击跳转看所有内容,关注不迷路!>。这个专栏专注于前沿的深度学习技术,特别是目标检测领域的最新进展,不仅包含对YOLO26的深入解析和改进策略,还会定期更新来自各大顶会(如CVPR、NeurIPS等)的论文复现和实战分享。
为什么订阅我的专栏? ——专栏地址:YOLO26改进-论文涨点——点击跳转看所有内容,关注不迷路!
-
前沿技术解读:专栏不仅限于YOLO系列的改进,还会涵盖各类主流与新兴网络的最新研究成果,帮助你紧跟技术潮流。
-
详尽的实践分享:所有内容实践性也极强。每次更新都会附带代码和具体的改进步骤,保证每位读者都能迅速上手。
-
问题互动与答疑:订阅我的专栏后,你将可以随时向我提问,获取及时的答疑。
-
实时更新,紧跟行业动态:不定期发布来自全球顶会的最新研究方向和复现实验报告,让你时刻走在技术前沿。
专栏适合人群:
-
对目标检测、YOLO系列网络有深厚兴趣的同学
-
希望在用YOLO算法写论文的同学
-
对YOLO算法感兴趣的同学等

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 5
5 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)