YOLO26改进| 主干网络 | 以条带化卷积减少计算量、强化多尺度特征融合的StripNet
💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡
本文给大家带来的教程是将YOLO26的主干替换为StripNet 来提取特征。文章在介绍主要的原理后,将手把手教学如何进行模块的代码添加和修改,并将修改后的完整代码放在文章的最后,方便大家一键运行,小白也可轻松上手实践。以帮助您更好地学习深度学习目标检测YOLO系列的挑战。
目录
1.论文
论文地址:Strip R-CNN: Large Strip Convolution for Remote Sensing Object Detection
官方代码:官方代码仓库点击即可跳转
2. StripNet 代码实现
2.1 将StripNet 添加到YOLO26中
关键步骤一:在ultralytics\ultralytics\nn\modules下面新建文件夹models,在文件夹下新建StripNet.py,粘贴下面代码
import torch
import torch.nn as nn
import math
from functools import partial
import warnings
# 從 timm 導入必要的工具
from timm.models.layers import DropPath, to_2tuple, trunc_normal_
# --- 輔助函數區 (替代 mmcv 功能) ---
def get_norm_layer(norm_cfg, num_features):
"""根據配置字典創建標準化層。"""
if norm_cfg is None:
# 預設使用 BatchNorm2d,與原始代碼行為一致
return nn.BatchNorm2d(num_features)
norm_type = norm_cfg.get('type')
if norm_type == 'SyncBN':
# 注意:SyncBatchNorm 需要在 DDP 環境下才能正常工作
return nn.SyncBatchNorm(num_features, **norm_cfg.get('kwargs', {}))
elif norm_type == 'BN':
return nn.BatchNorm2d(num_features, **norm_cfg.get('kwargs', {}))
elif norm_type == 'LN':
return nn.LayerNorm(num_features, **norm_cfg.get('kwargs', {}))
else:
raise NotImplementedError(f"Normalization layer type '{norm_type}' is not implemented.")
# --- 模型組件區 (原始代碼,稍作修改以移除依賴) ---
class Mlp(nn.Module):
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Conv2d(in_features, hidden_features, 1)
self.dwconv = DWConv(hidden_features)
self.act = act_layer()
self.fc2 = nn.Conv2d(hidden_features, out_features, 1)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.dwconv(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class StripBlock(nn.Module):
def __init__(self, dim, k1, k2):
super().__init__()
self.conv0 = nn.Conv2d(dim, dim, 5, padding=2, groups=dim)
self.conv_spatial1 = nn.Conv2d(dim, dim, kernel_size=(k1, k2), stride=1, padding=(k1//2, k2//2), groups=dim)
self.conv_spatial2 = nn.Conv2d(dim, dim, kernel_size=(k2, k1), stride=1, padding=(k2//2, k1//2), groups=dim)
self.conv1 = nn.Conv2d(dim, dim, 1)
def forward(self, x):
attn = self.conv0(x)
attn = self.conv_spatial1(attn)
attn = self.conv_spatial2(attn)
attn = self.conv1(attn)
return x * attn
class Attention(nn.Module):
def __init__(self, d_model, k1, k2):
super().__init__()
self.proj_1 = nn.Conv2d(d_model, d_model, 1)
self.activation = nn.GELU()
self.spatial_gating_unit = StripBlock(d_model, k1, k2)
self.proj_2 = nn.Conv2d(d_model, d_model, 1)
def forward(self, x):
shortcut = x.clone()
x = self.proj_1(x)
x = self.activation(x)
x = self.spatial_gating_unit(x)
x = self.proj_2(x)
x = x + shortcut
return x
class Block(nn.Module):
def __init__(self, dim, mlp_ratio=4., k1=1, k2=19, drop=0., drop_path=0., act_layer=nn.GELU, norm_cfg=None):
super().__init__()
self.norm1 = get_norm_layer(norm_cfg, dim)
self.attn = Attention(dim, k1, k2)
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
self.norm2 = get_norm_layer(norm_cfg, dim)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
layer_scale_init_value = 1e-2
self.layer_scale_1 = nn.Parameter(
layer_scale_init_value * torch.ones((dim)), requires_grad=True)
self.layer_scale_2 = nn.Parameter(
layer_scale_init_value * torch.ones((dim)), requires_grad=True)
def forward(self, x):
x = x + self.drop_path(self.layer_scale_1.unsqueeze(-1).unsqueeze(-1) * self.attn(self.norm1(x)))
x = x + self.drop_path(self.layer_scale_2.unsqueeze(-1).unsqueeze(-1) * self.mlp(self.norm2(x)))
return x
class OverlapPatchEmbed(nn.Module):
""" Image to Patch Embedding """
def __init__(self, img_size=224, patch_size=7, stride=4, in_chans=3, embed_dim=768, norm_cfg=None):
super().__init__()
patch_size = to_2tuple(patch_size)
self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=stride,
padding=(patch_size[0] // 2, patch_size[1] // 2))
self.norm = get_norm_layer(norm_cfg, embed_dim)
def forward(self, x):
x = self.proj(x)
_, _, H, W = x.shape
x = self.norm(x)
return x, H, W
class StripNet(nn.Module):
def __init__(self, img_size=224, in_chans=3, embed_dims=[64, 128, 256, 512],
mlp_ratios=[8, 8, 4, 4], k1s=[1, 1, 1, 1], k2s=[19, 19, 19, 19],
drop_rate=0., drop_path_rate=0., norm_layer=partial(nn.LayerNorm, eps=1e-6),
depths=[3, 4, 6, 3], num_stages=4,
pretrained=None,
norm_cfg=None):
super().__init__()
self.depths = depths
self.num_stages = num_stages
self.embed_dims = embed_dims
dpr = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))] # stochastic depth decay rule
cur = 0
for i in range(num_stages):
patch_embed = OverlapPatchEmbed(img_size=img_size if i == 0 else img_size // (2 ** (i + 1)),
patch_size=7 if i == 0 else 3,
stride=4 if i == 0 else 2,
in_chans=in_chans if i == 0 else embed_dims[i - 1],
embed_dim=embed_dims[i], norm_cfg=norm_cfg)
block = nn.ModuleList([Block(
dim=embed_dims[i], mlp_ratio=mlp_ratios[i], k1=k1s[i], k2=k2s[i],
drop=drop_rate, drop_path=dpr[cur + j], norm_cfg=norm_cfg)
for j in range(depths[i])])
# 使用 nn.LayerNorm 作为 Transformer-style block 结尾的 norm
norm = norm_layer(embed_dims[i])
cur += depths[i]
setattr(self, f"patch_embed{i + 1}", patch_embed)
setattr(self, f"block{i + 1}", block)
setattr(self, f"norm{i + 1}", norm)
# 初始化權重
self.apply(self._init_weights)
if pretrained:
self.load_pretrained(pretrained)
# 參考 EMO 模型,在初始化最後計算 width_list
# 這有助於與需要知道各階段輸出通道數的框架(如YOLOv8)集成
# 注意: 這裡的 forward() 會被調用,所以要確保模型結構在此時已完整
self.width_list = [i.shape[1] for i in self.forward(torch.randn(1, in_chans, 640, 640))]
# print(f"StripNet initialized. Output channels per stage: {self.width_list}")
def _init_weights(self, m):
"""權重初始化函數,替代 mmcv.cnn.utils.weight_init"""
if isinstance(m, nn.Linear):
trunc_normal_(m.weight, std=.02)
if isinstance(m, nn.Linear) and m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, (nn.LayerNorm, nn.BatchNorm2d)):
if m.bias is not None:
nn.init.constant_(m.bias, 0)
if m.weight is not None:
nn.init.constant_(m.weight, 1.0)
elif isinstance(m, nn.Conv2d):
fan_out = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
fan_out //= m.groups
m.weight.data.normal_(0, math.sqrt(2.0 / fan_out))
if m.bias is not None:
m.bias.data.zero_()
def load_pretrained(self, pretrained_path):
"""加載預訓練權重"""
if pretrained_path:
print(f"Loading pretrained weights from {pretrained_path}")
try:
# 加載 checkpoint
checkpoint = torch.load(pretrained_path, map_location='cpu')
# 處理不同 checkpoint 格式 (例如 'state_dict', 'model', or root)
if 'state_dict' in checkpoint:
state_dict = checkpoint['state_dict']
elif 'model' in checkpoint:
state_dict = checkpoint['model']
else:
state_dict = checkpoint
# 移除 'head.' or 'backbone.' 等前綴(如果有的話)
# 這一步驟對於從不同訓練框架導出的權重很重要
new_state_dict = {}
for k, v in state_dict.items():
if k.startswith('backbone.'):
new_state_dict[k[len('backbone.'):]] = v
elif k.startswith('head.'):
continue # 通常不加載分類頭
else:
new_state_dict[k] = v
# 加載權重
msg = self.load_state_dict(new_state_dict, strict=False)
print(f"Pretrained weights loaded with message: {msg}")
except Exception as e:
print(f"Error loading pretrained weights: {e}")
@torch.jit.ignore
def no_weight_decay(self):
return {'pos_embed1', 'pos_embed2', 'pos_embed3', 'pos_embed4', 'cls_token'}
def forward_features(self, x):
B = x.shape[0]
outs = []
for i in range(self.num_stages):
patch_embed = getattr(self, f"patch_embed{i + 1}")
block = getattr(self, f"block{i + 1}")
norm = getattr(self, f"norm{i + 1}")
x, H, W = patch_embed(x)
for blk in block:
x = blk(x)
# 原始的 norm 應用方式是針對 Transformer 的 (B, N, C)
# 這裡我們保持 CNN 的 (B, C, H, W) 格式
x_reshaped = x.flatten(2).transpose(1, 2)
x_normed = norm(x_reshaped)
x = x_normed.reshape(B, H, W, -1).permute(0, 3, 1, 2).contiguous()
outs.append(x)
return outs
def forward(self, x):
x = self.forward_features(x)
# 確保輸出是 list,以避免 'tuple' object has no attribute 'insert' 錯誤
# 即使 forward_features 已經返回 list,這裡再次轉換可以確保萬無一失
return list(x)
class DWConv(nn.Module):
def __init__(self, dim=768):
super(DWConv, self).__init__()
self.dwconv = nn.Conv2d(dim, dim, 3, 1, 1, bias=True, groups=dim)
def forward(self, x):
x = self.dwconv(x)
return x
# --- 工廠函數 (類似 EMO 的使用方式) ---
def StripNet_tiny(pretrained=None, **kwargs):
"""
StripNet-Tiny model.
"""
model = StripNet(
embed_dims=[32, 64, 160, 256],
k1s=[1, 1, 1, 1],
k2s=[19, 19, 19, 19],
mlp_ratios=[8, 8, 4, 4],
drop_rate=0.1,
drop_path_rate=0.15,
depths=[3, 3, 5, 2],
norm_cfg=dict(type='BN'), # 使用普通 BN,或根據需要改為 'SyncBN'
pretrained=pretrained,
**kwargs
)
return model
def StripNet_small(pretrained=None, **kwargs):
"""
StripNet-Small model.
"""
model = StripNet(
embed_dims=[64, 128, 320, 512],
k1s=[1, 1, 1, 1],
k2s=[19, 19, 19, 19],
mlp_ratios=[8, 8, 4, 4],
drop_rate=0.1,
drop_path_rate=0.15,
depths=[2, 2, 4, 2],
norm_cfg=dict(type='BN'), # 使用普通 BN,或根據需要改為 'SyncBN'
pretrained=pretrained,
**kwargs
)
return model
# --- 使用範例 ---
if __name__ == '__main__':
# 創建一個 StripNet-Tiny 模型
print("Creating StripNet-Tiny model...")
# 假設預訓練權重 'pretrained/stripnet_s.pth.tar' 存在
# model_tiny = StripNet_tiny(pretrained='path/to/your/weights.pth')
model_tiny = StripNet_tiny()
# 創建一個 StripNet-Small 模型
print("\nCreating StripNet-Small model...")
model_small = StripNet_small()
# 打印模型結構
# print(model_small)
# 測試前向傳播
print("\nTesting forward pass...")
dummy_input = torch.randn(1, 3, 640, 640)
output_features = model_small(dummy_input)
# 檢查輸出
print(f"Output is a: {type(output_features)}")
print(f"Number of output feature maps: {len(output_features)}")
for i, feature_map in enumerate(output_features):
print(f" - Feature map {i+1} shape: {feature_map.shape}")
# 檢查 width_list 是否正確
print(f"\nModel's pre-calculated width_list: {model_small.width_list}")
# 驗證 width_list 是否與實際輸出通道數一致
actual_widths = [f.shape[1] for f in output_features]
assert model_small.width_list == actual_widths
print("width_list matches actual output channels. Verification successful.")2.2 更改init.py文件
关键步骤二:在文件ultralytics\ultralytics\nn\modules\models文件夹下新建__init__.py文件,先导入函数
然后在下面的__all__中声明函数
2.3 添加yaml文件
关键步骤三:在/ultralytics/ultralytics/cfg/models/26下面新建文件yolo26_StripNet.yaml文件,粘贴下面的内容
- 目标检测
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Ultralytics YOLO26 object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/yolo26
# Task docs: https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
end2end: True # whether to use end-to-end mode
reg_max: 1 # DFL bins
scales: # model compound scaling constants, i.e. 'model=yolo26n.yaml' will call yolo26.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 260 layers, 2,572,280 parameters, 2,572,280 gradients, 6.1 GFLOPs
s: [0.50, 0.50, 1024] # summary: 260 layers, 10,009,784 parameters, 10,009,784 gradients, 22.8 GFLOPs
m: [0.50, 1.00, 512] # summary: 280 layers, 21,896,248 parameters, 21,896,248 gradients, 75.4 GFLOPs
l: [1.00, 1.00, 512] # summary: 392 layers, 26,299,704 parameters, 26,299,704 gradients, 93.8 GFLOPs
x: [1.00, 1.50, 512] # summary: 392 layers, 58,993,368 parameters, 58,993,368 gradients, 209.5 GFLOPs
# YOLO26n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, StripNet_tiny, []]
- [-1, 1, SPPF, [1024, 5]] # 5
- [-1, 2, C2PSA, [1024]] # 6
# YOLO26n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 3], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2, [512, False]] # 9
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 2], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2, [256, False]] # 12 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2, [512, False]] # 15 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 6], 1, Concat, [1]] # cat head P5
- [-1, 2, C3k2, [1024, True]] # 18 (P5/32-large)
- [[12, 15, 18], 1, Detect, [nc]] # Detect(P3, P4, P5)- 语义分割
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Ultralytics YOLO26 object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/yolo26
# Task docs: https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
end2end: True # whether to use end-to-end mode
reg_max: 1 # DFL bins
scales: # model compound scaling constants, i.e. 'model=yolo26n.yaml' will call yolo26.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 260 layers, 2,572,280 parameters, 2,572,280 gradients, 6.1 GFLOPs
s: [0.50, 0.50, 1024] # summary: 260 layers, 10,009,784 parameters, 10,009,784 gradients, 22.8 GFLOPs
m: [0.50, 1.00, 512] # summary: 280 layers, 21,896,248 parameters, 21,896,248 gradients, 75.4 GFLOPs
l: [1.00, 1.00, 512] # summary: 392 layers, 26,299,704 parameters, 26,299,704 gradients, 93.8 GFLOPs
x: [1.00, 1.50, 512] # summary: 392 layers, 58,993,368 parameters, 58,993,368 gradients, 209.5 GFLOPs
# YOLO26n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, StripNet_tiny, []]
- [-1, 1, SPPF, [1024, 5]] # 5
- [-1, 2, C2PSA, [1024]] # 6
# YOLO26n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 3], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2, [512, False]] # 9
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 2], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2, [256, False]] # 12 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2, [512, False]] # 15 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 6], 1, Concat, [1]] # cat head P5
- [-1, 2, C3k2, [1024, True]] # 18 (P5/32-large)
- [[12, 15, 18], 1, Segment, [nc, 32, 256]]- 旋转目标检测
# Ultralytics 🚀 AGPL-3.0 License - https://ultralytics.com/license
# Ultralytics YOLO26 object detection model with P3/8 - P5/32 outputs
# Model docs: https://docs.ultralytics.com/models/yolo26
# Task docs: https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
end2end: True # whether to use end-to-end mode
reg_max: 1 # DFL bins
scales: # model compound scaling constants, i.e. 'model=yolo26n.yaml' will call yolo26.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 260 layers, 2,572,280 parameters, 2,572,280 gradients, 6.1 GFLOPs
s: [0.50, 0.50, 1024] # summary: 260 layers, 10,009,784 parameters, 10,009,784 gradients, 22.8 GFLOPs
m: [0.50, 1.00, 512] # summary: 280 layers, 21,896,248 parameters, 21,896,248 gradients, 75.4 GFLOPs
l: [1.00, 1.00, 512] # summary: 392 layers, 26,299,704 parameters, 26,299,704 gradients, 93.8 GFLOPs
x: [1.00, 1.50, 512] # summary: 392 layers, 58,993,368 parameters, 58,993,368 gradients, 209.5 GFLOPs
# YOLO26n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, StripNet_tiny, []]
- [-1, 1, SPPF, [1024, 5]] # 5
- [-1, 2, C2PSA, [1024]] # 6
# YOLO26n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 3], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2, [512, False]] # 9
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 2], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2, [256, False]] # 12 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2, [512, False]] # 15 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 6], 1, Concat, [1]] # cat head P5
- [-1, 2, C3k2, [1024, True]] # 18 (P5/32-large)
- [[12, 15, 18], 1, OBB, [nc, 1]]温馨提示:本文只是对yolo26基础上添加模块,如果要对yolo26 n/l/m/x进行添加则只需要指定对应的depth_multiple 和 width_multiple
end2end: True # whether to use end-to-end mode
reg_max: 1 # DFL bins
scales: # model compound scaling constants, i.e. 'model=yolo26n.yaml' will call yolo26.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 260 layers, 2,572,280 parameters, 2,572,280 gradients, 6.1 GFLOPs
s: [0.50, 0.50, 1024] # summary: 260 layers, 10,009,784 parameters, 10,009,784 gradients, 22.8 GFLOPs
m: [0.50, 1.00, 512] # summary: 280 layers, 21,896,248 parameters, 21,896,248 gradients, 75.4 GFLOPs
l: [1.00, 1.00, 512] # summary: 392 layers, 26,299,704 parameters, 26,299,704 gradients, 93.8 GFLOPs
x: [1.00, 1.50, 512] # summary: 392 layers, 58,993,368 parameters, 58,993,368 gradients, 209.5 GFLOPs2.4 在task.py中进行注册
关键步骤四:在parse_model函数中进行注册,添加StripNet
先在task.py导入函数

然后在task.py文件下找到parse_model这个函数,如下图,添加StripNet
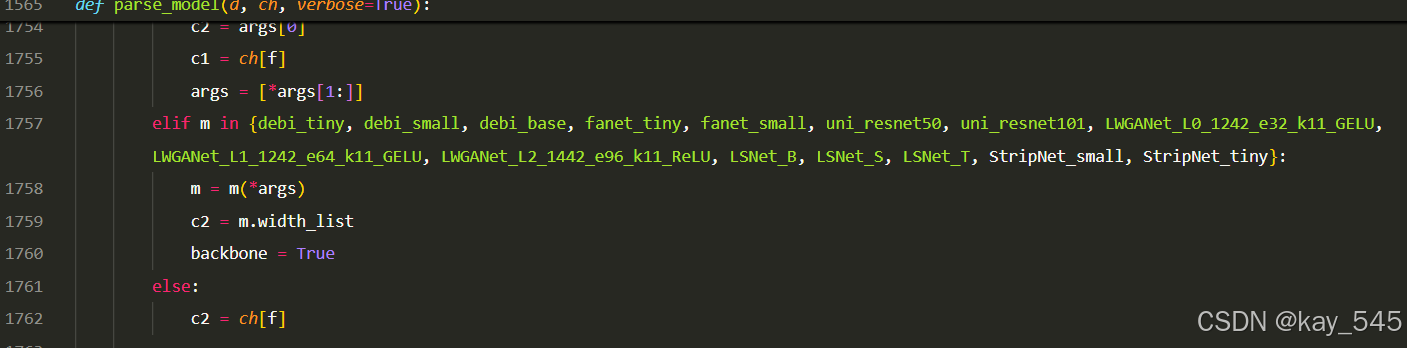
elif m in {StripNet_small, StripNet_tiny}:
m = m(*args)
c2 = m.width_list
backbone = True
else:
c2 = ch[f]2.5 执行程序
关键步骤五: 在ultralytics文件中新建train.py,将model的参数路径设置为yolo26_StripNet .yaml的路径即可 【注意是在外边的Ultralytics下新建train.py】
from ultralytics import YOLO
import warnings
warnings.filterwarnings('ignore')
from pathlib import Path
if __name__ == '__main__':
# 加载模型
model = YOLO("ultralytics/cfg/26/yolo26.yaml") # 你要选择的模型yaml文件地址
# Use the model
results = model.train(data=r"你的数据集的yaml文件地址",
epochs=100, batch=16, imgsz=640, workers=4, name=Path(model.cfg).stem) # 训练模型🚀运行程序,如果出现下面的内容则说明添加成功🚀
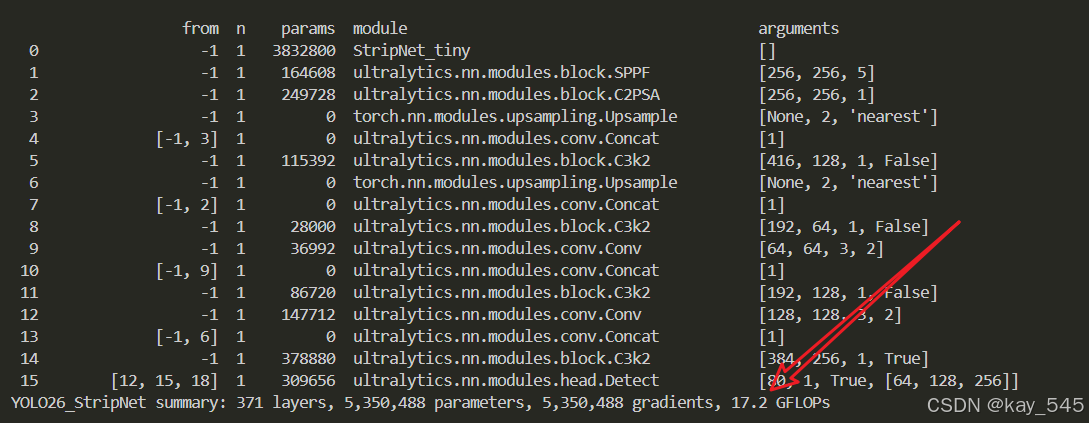
from n params module arguments
0 -1 1 3832800 StripNet_tiny []
1 -1 1 164608 ultralytics.nn.modules.block.SPPF [256, 256, 5]
2 -1 1 249728 ultralytics.nn.modules.block.C2PSA [256, 256, 1]
3 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
4 [-1, 3] 1 0 ultralytics.nn.modules.conv.Concat [1]
5 -1 1 115392 ultralytics.nn.modules.block.C3k2 [416, 128, 1, False]
6 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
7 [-1, 2] 1 0 ultralytics.nn.modules.conv.Concat [1]
8 -1 1 28000 ultralytics.nn.modules.block.C3k2 [192, 64, 1, False]
9 -1 1 36992 ultralytics.nn.modules.conv.Conv [64, 64, 3, 2]
10 [-1, 9] 1 0 ultralytics.nn.modules.conv.Concat [1]
11 -1 1 86720 ultralytics.nn.modules.block.C3k2 [192, 128, 1, False]
12 -1 1 147712 ultralytics.nn.modules.conv.Conv [128, 128, 3, 2]
13 [-1, 6] 1 0 ultralytics.nn.modules.conv.Concat [1]
14 -1 1 378880 ultralytics.nn.modules.block.C3k2 [384, 256, 1, True]
15 [12, 15, 18] 1 309656 ultralytics.nn.modules.head.Detect [80, 1, True, [64, 128, 256]]
YOLO26_StripNet summary: 371 layers, 5,350,488 parameters, 5,350,488 gradients, 17.2 GFLOPs3. 完整代码分享
主页侧边
4. GFLOPs
关于GFLOPs的计算方式可以查看:百面算法工程师 | 卷积基础知识——Convolution
未改进的YOLO26n GFLOPs
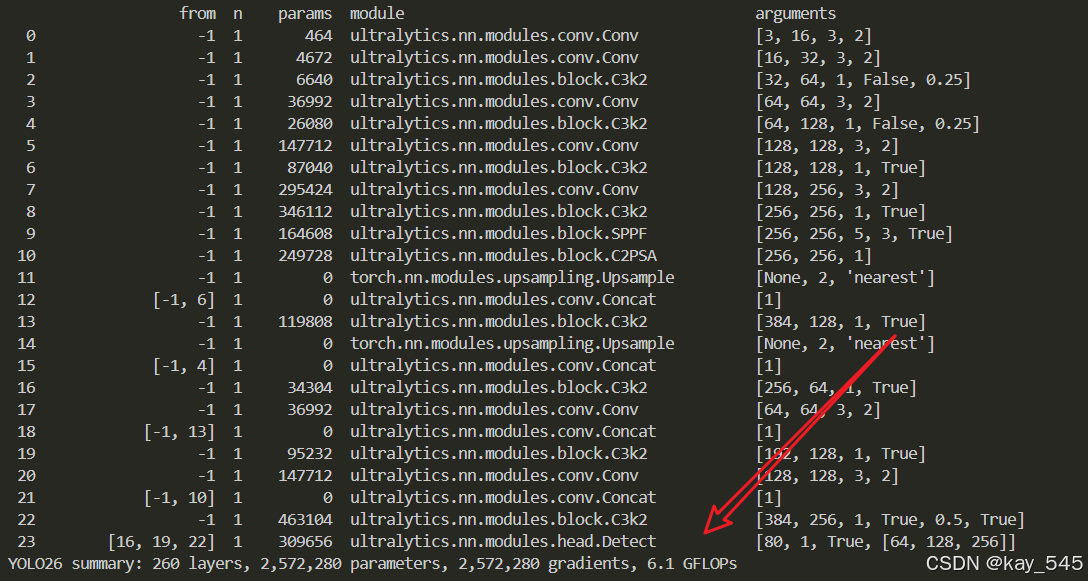
改进后的GFLOPs
5. 进阶
可以与其他的注意力机制或者损失函数等结合,进一步提升检测效果
6.总结
通过以上的改进方法,我们成功提升了模型的表现。这只是一个开始,未来还有更多优化和技术深挖的空间。在这里,我想隆重向大家推荐我的专栏——<专栏地址:YOLO26改进-论文涨点——点击跳转看所有内容,关注不迷路!>。这个专栏专注于前沿的深度学习技术,特别是目标检测领域的最新进展,不仅包含对YOLO26的深入解析和改进策略,还会定期更新来自各大顶会(如CVPR、NeurIPS等)的论文复现和实战分享。
为什么订阅我的专栏? ——专栏地址:YOLO26改进-论文涨点——点击跳转看所有内容,关注不迷路!
-
前沿技术解读:专栏不仅限于YOLO系列的改进,还会涵盖各类主流与新兴网络的最新研究成果,帮助你紧跟技术潮流。
-
详尽的实践分享:所有内容实践性也极强。每次更新都会附带代码和具体的改进步骤,保证每位读者都能迅速上手。
-
问题互动与答疑:订阅我的专栏后,你将可以随时向我提问,获取及时的答疑。
-
实时更新,紧跟行业动态:不定期发布来自全球顶会的最新研究方向和复现实验报告,让你时刻走在技术前沿。
专栏适合人群:
-
对目标检测、YOLO系列网络有深厚兴趣的同学
-
希望在用YOLO算法写论文的同学
-
对YOLO算法感兴趣的同学等

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 13
13 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)