BF信号是如何多路合一的
·
BF信号是如何多路合一的
典型的语音信号处理流程如下: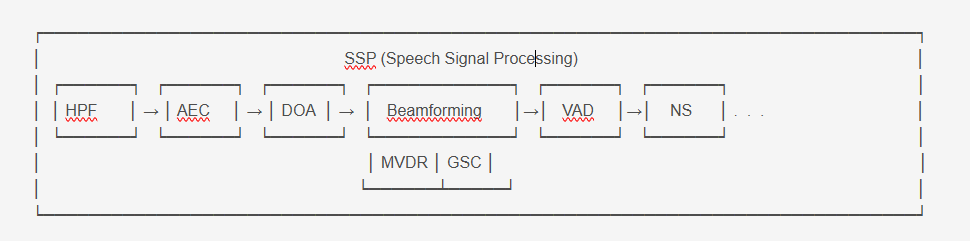
DOA的经典方法:Capon 波束成形器
Capon 波束成形器(也称为 MVDR)用于估计声源方向
MVDR (Minimum Variance Distortionless Response) 波束成形
核心思想: 在保持目标方向信号无失真的前提下,最小化输出方差
MVDR 权重计算公式:
MCRA 噪声估计 :
使用最小值跟踪法估计噪声功率谱
平滑因子自适应调整
GSC (Generalized Sidelobe Canceller) 广义旁瓣对消器
GSC算法模块介绍:
| 模块 | 功能 |
|---|---|
| BeamSteering | 根据目标方向计算各麦克风的时延补偿 (TDOA) |
| FBF | 固定波束成形,对目标方向信号进行延迟求和 |
| ABM | 自适应阻塞矩阵,阻止目标信号进入旁路 |
| AIC | 自适应干扰对消器,消除残余干扰 |
两种BF算法的比较:
| 特性 | MVDR | GSC |
|---|---|---|
| 计算复杂度 | 较高(需矩阵求逆) | 中等(自适应滤波) |
| 收敛速度 | 较快 | 较慢(需自适应过程) |
| 稳定性 | 需正则化 | 更稳定 |
| 信号取消风险 | 低 | 可能发生目标信号取消 |
| 适用场景 | 噪声统计已知 | 非平稳干扰环境 |
核心架构对比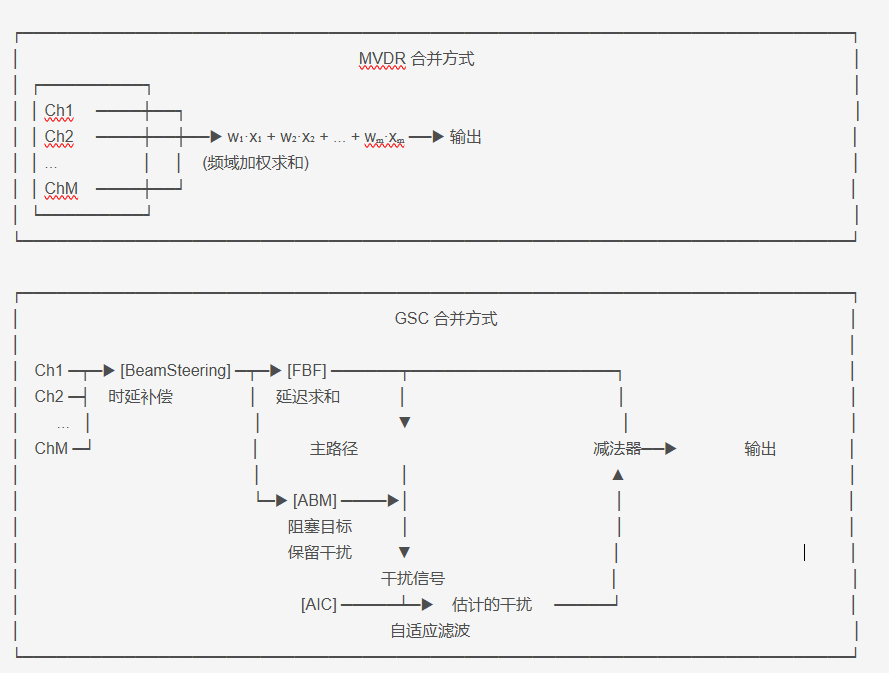
简而言之,既可以时域延时相加,也可以频域加权相加,GSC 多通道合并不需要频域求逆,所以非常适合嵌入式系统实施,本质上就是FBF,一个 延迟求和波束成形器:
| 模块 | 输入 | 输出 | 作用 | 关键思想 |
|---|---|---|---|---|
| BeamSteering | M 路原始信号 | M 路时延补偿后信号 | 补偿各麦克风到目标方向的时延 | 对齐 |
| FBF (固定波束成形器) | M 路时延补偿信号 | 1 路参考信号 | 均匀权重求和:增强目标方向信号 | 使用简单均匀权重,保证目标方向无失真(因为时延已对齐),但干扰也被混合进来了 |
| ABM (自适应阻塞矩阵) | M 路时延补偿信号 | M 路干扰信号 | 阻塞目标信号,只保留干扰 | 设计一个阻塞滤波器,让目标方向的信号被"阻塞",只让干扰信号通过,这样 ABM 输出主要是干扰 |
| AIC (自适应干扰对消器) | M 路干扰信号 | 1 路干扰估计 | 自适应抵消 FBF 输出中的干扰 | 用 ABM 输出的干扰信号,自适应地抵消 FBF 输出中的干扰成分,类似于 AEC (回声消除) 的原理 |
类比理解:
MVDR = 一次性计算最优权重
GSC = 先用简单权重,再用自适应滤波器"修正"结果
由此可以看出,GSC避免了矩阵求逆的数值稳定性问题,自适应滤波器可以跟踪非平稳干扰, 模块化设计,便于调试和优化
| 特性 | MVDR | GSC |
|---|---|---|
| 合并方式 | 频域加权求和 | 延迟求和 + 自适应干扰抵消 |
| 权重 | 复数,随频率变化 | FBF 均匀权重,AIC 自适应 |
| 计算量 | 矩阵求逆 | 自适应滤波 |
| 目标保护 | 约束优化保证 | FBF 天然保证 |
| 干扰抑制 | 通过权重设计 | 通过 AIC 自适应学习 |

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 3
3 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)