【转载】ROS 中 CMakeLists.txt 文件使用的讲解与总结
本博客转载自:【阿里云开发者社区】ROS 中 CMakeLists.txt 文件使用讲解与总结
一、CMakeLists.txt 作用
在 ROS 系统的功能包中要包含 CMakeLists.txt 与 package.xml 文件 来编译功能包的内容。
CMakeLists.txt 原本是 Cmake 编译系统的规则文件,而 Catkin 编译系统基本沿用了 CMake 的编译风格,只是针对 ROS 工程添加了一些宏定义。所以在写法上,catkin 的 CMakeLists.txt 与 CMake 的基本一致。
catkin 的 CMakeLists.txt 文件直接规定了这个 package 要依赖哪些 package,要编译生成哪些目标,如何编译等等流程。
所以 ROS 中 CMakeLists.txt 非常重要,它指定了由源码到目标文件的规则,catkin 编译系统在工作时首先会找到每个 package 下的 CMakeLists.txt ,然后按照规则来编译构建。
二、CMakeLists.txt 写法
CMakeLists.txt 的基本语法都还是按照 CMake,而 Catkin 在其中加入了少量的宏。
| 指令/方法 | 作用/说明 |
|---|---|
| cmake_minimum_required() | CMake 的版本号 |
| project() | 项目名称 |
| find_package() | 找到编译需要的其他 CMake/Catkin package |
| catkin_python_setup() | catkin 新加宏,打开 catkin 的 Python Module 的支持 |
| add_message_files() | catkin 新加宏,添加自定义 Message 文件 |
| generate_message() | catkin 新加宏,生成不同语言版本的 msg/srv/action 接口 |
| add_service_files() | catkin 新加宏,添加自定义 Service 文件 |
| add_action_files() | catkin 新加宏,添加自定义 Action 文件 |
| catkin_package() | catkin 新加宏,生成当前 package 的 cmake 配置,供依赖本包的其他软件包调用 |
| catkin_add_gtest() | catkin 新加宏,生成测试 |
| add_library() | 生成库 |
| add_executable() | 生成可执行二进制文件 |
| add_dependencies() | 定义目标文件依赖于其他目标文件,确保其他目标已被构建 |
| target_link_libraries() | 链接 |
| install() | 安装至本机 |
三、CMakeLists.txt 实例
为了详细的解释 CMakeLists.txt 的写法,以 turtlesim 小海龟这个 pacakge 为例进行讲解。
可 roscd 到 tuetlesim 包下查看,
在 turtlesim/CMakeLists.txt 的写法如下:
cmake_minimum_required(VERSION 2.8.3) # CMake至少为2.8.3版
project(turtlesim)
# 项目 (package) 名称为 turtlesim,在后续文件中可使用变量 ${PROJECT_NAME} 来引用项目名称 turltesim
# 这两个是 通过ros 指令 创建包 中就自动生成好的
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
message_generation
rosconsole
roscpp
roscpp_serialization
roslib
rostime
std_msgs
std_srvs)
# cmake 宏,指定依赖的其他 pacakge,实际是生成了一些环境变量,如 <NAME>_FOUND, <NAME>_INCLUDE_DIRS , <NAME>_LIBRARYIS
# 此处catkin是必备依赖 其余的 geometry_msgs... 为组件
include_directories(include ${catkin_INCLUDE_DIRS} ${Boost_INCLUDE_DIRS})
# 指定C++的头文件路径
link_directories(${catkin_LIBRARY_DIRS})
# 指定链接库的路径
add_message_files(DIRECTORY msg FILES Color.msg Pose.msg) #自定义msg文件
add_service_files(DIRECTORY srv FILES Kill.srv SetPen.srv Spawn.srv TeleportAbsolute.srv TeleportRelative.srv) #自定义srv文件
generate_messages(DEPENDENCIES geometry_msgs std_msgs std_srvs)
# 在 add_message_files、add_service_files 宏之后必须加上这句话,用于生成 srv msg 头文件,生 成的文件位于 devel/include 中
catkin_package(CATKIN_DEPENDS geometry_msgs message_runtime std_msgs std_srvs)
# catkin 宏命令,用于配置 ROS 的 package 配置文件和 CMake 文件
# 这个命令必须在 add_library() 或者 add_executable() 之前调用,该函数有 5 个可选参数:
# (1) INCLUDE_DIRS - 导出包的include路径
# (2) LIBRARIES - 导出项目中的库
# (3) CATKIN_DEPENDS - 该项目依赖的其他catkin项目
# (4) DEPENDS - 该项目所依赖的非catkin CMake项目。
# (5) CFG_EXTRAS - 其他配置选
set(turtlesim_node_SRCS src/turtlesim.cpp src/turtle.cpp src/turtle_frame.cpp)
set(turtlesim_node_HDRS include/turtlesim/turtle_frame.h )
# 指定 turtlesim_node_SRCS、turtlesim_node_HDRS 变量
qt5_wrap_cpp(turtlesim_node_MOCS ${turtlesim_node_HDRS})
add_executable(turtlesim_node ${turtlesim_node_SRCS} ${turtlesim_node_MOCS}) # 指定可执行文件目标turtlesim_node
target_link_libraries(turtlesim_node Qt5::Widgets ${catkin_LIBRARIES} ${Boost_LIBRARIE S}) # 指定链接可执行文件
add_dependencies(turtlesim_node turtlesim_gencpp)
add_executable(turtle_teleop_key tutorials/teleop_turtle_key.cpp) target_link_libraries(turtle_teleop_key ${catkin_LIBRARIES}) add_dependencies(turtle_teleop_key turtlesim_gencpp)
add_executable(draw_square tutorials/draw_square.cpp) target_link_libraries(draw_square ${catkin_LIBRARIES} ${Boost_LIBRARIES}) add_dependencies(draw_square turtlesim_gencpp)
add_executable(mimic tutorials/mimic.cpp) target_link_libraries(mimic ${catkin_LIBRARIES}) add_dependencies(mimic turtlesim_gencpp)
# 同样指定可执行目标、链接、依赖
install(TARGETS turtlesim_node turtle_teleop_key draw_square mimic RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}) # 安装目标文件到本地系统
install(DIRECTORY images DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION} FILES_MATCHING PATTERN "*.png" PATTERN "*.svg")
四、工程实践中遇到的问题总结
在一个功能包中,将类的函数定义与声明分开文件写,用 main.cpp 调用
类的声明和定义分开文件下,按之前那么处理、分布查看
只加这个,先生成 library

编译成功类的声明和函数定义分开写的
生成了这个文件
继续加 main.cpp 的
只加这个

报错,很多都没定义
加上这个

这一条最后去掉了编译也成功 ,在使用自己的 msg 头文件时,必须添加 add_dependencies,否则找不到自定义的 msg 产生的头文件!
报错一样
再加

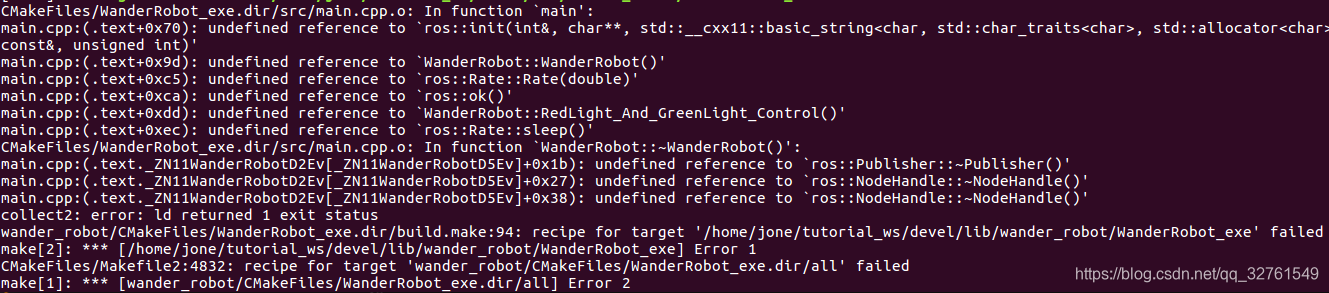
报错变了 没有了 ros::init() 这种未定义了,说明必须要加上面的,是最基本的

现在的错误就是没有找到类的定义的函数
把这个库加上

还是没找到,和之前报错一样
给上面那个类的定义,那个库也加上 target_link_libraries

编译就通过了
target_link_libraries() 这个功能可能是让其它文件可以定用这个库
- 那么还有个问题 ,要想用其它功能包的类的函数怎么办?
官网有详细的解释
CMakeLists.txt ROS 官网

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)