基于RBF神经网络模型,根据历史车速信息,预测将来几秒预测时域的车速信息的时序预测模型(本程序...
基于RBF神经网络模型,根据历史车速信息,预测将来几秒预测时域的车速信息的时序预测模型(本程序先根据训练工况训练,采用训练后的神经网络模型,预测UDDS循环工况,每个时间点车速下将来几秒内 的车速信息)。 1.文件包括,训练工况(.mat数据,工况可自己选取最好与想要预测的工况类似,如预测工况是城郊工况,训练工况最好也选择同类的)以及测试工况(.mat数据, 自己选取想要预测的工况),以及REF预测主程序(.m程序); 2.车速预测程序基于matlab m编程完成,已备注好如何修改预测步长,可根据需求自己调整 ; 3.程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的车速预测部分,或其他时序预测类也可参考(坡度预测、流量预测等)。
1. 项目概述
本项目基于RBF(径向基函数)神经网络构建了一个时序预测模型,专门用于根据历史车速信息预测未来几秒内的车速变化。该模型采用两阶段工作流程:首先使用训练工况数据对神经网络进行训练,然后利用训练好的模型对UDDS循环工况进行实时车速预测。这种预测方法在智能交通系统、车辆能量管理和自动驾驶等领域具有重要的应用价值。
2. 数据准备与预处理
2.1 训练数据构建
模型从训练数据集中提取输入输出对,采用滑动窗口方法构建训练样本。具体而言,系统使用连续7个时间点的历史车速数据作为输入特征,对应的未来7个时间点的车速作为预测目标。这种设计使得模型能够学习从短期历史序列到未来序列的映射关系。
基于RBF神经网络模型,根据历史车速信息,预测将来几秒预测时域的车速信息的时序预测模型(本程序先根据训练工况训练,采用训练后的神经网络模型,预测UDDS循环工况,每个时间点车速下将来几秒内 的车速信息)。 1.文件包括,训练工况(.mat数据,工况可自己选取最好与想要预测的工况类似,如预测工况是城郊工况,训练工况最好也选择同类的)以及测试工况(.mat数据, 自己选取想要预测的工况),以及REF预测主程序(.m程序); 2.车速预测程序基于matlab m编程完成,已备注好如何修改预测步长,可根据需求自己调整 ; 3.程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的车速预测部分,或其他时序预测类也可参考(坡度预测、流量预测等)。
数据预处理阶段采用了归一化处理,将所有特征缩放到统一尺度,这对于神经网络训练的稳定性和收敛速度至关重要。归一化参数从训练数据中计算得到,并同样应用于测试数据,确保数据分布的一致性。
2.2 测试数据准备
测试数据的准备方式与训练数据类似,但使用独立的测试数据集。这种分离确保了模型评估的公正性,能够真实反映模型在未见数据上的泛化能力。
3. RBF神经网络架构
3.1 网络配置
项目选择了RBF神经网络作为核心预测模型,这种网络具有结构简单、训练速度快和逼近能力强的特点。网络配置了三个关键参数:
- 误差容限:设置为1e-3,控制训练精度
- 扩散因子:影响基函数的宽度,设为25
- 隐层神经元数量:设置为125个,平衡模型复杂度和表达能力
3.2 网络训练
网络训练过程采用有监督学习方式,通过比较网络输出与真实车速值来调整网络参数。RBF网络的特殊结构允许它快速学习输入与输出之间的非线性关系,这对于捕捉复杂的车速变化模式非常关键。
4. 预测流程
4.1 单步预测
模型接收当前时刻及之前6个时刻的车速数据,输出未来7个时刻的车速预测值。这种多步预测能力使模型能够提供较长时间的预测视野,为决策提供更多信息。
4.2 滚动预测
除了基本的单步预测外,系统还实现了滚动预测机制。通过将最新预测结果反馈到输入中,模型可以进行更长期的预测,这对于需要预判较长时间范围内车速变化的应用场景非常有用。
5. 模型评估与分析
5.1 误差指标
项目采用了多种指标全面评估模型性能:
- 平均绝对百分比误差(MAPE):衡量预测的相对误差
- 均方根误差(RMSE):评估预测的绝对误差
- 均方误差(MSE):反映预测值与真实值的偏离程度
这些指标从不同角度刻画了模型的预测精度,为模型优化提供了明确方向。
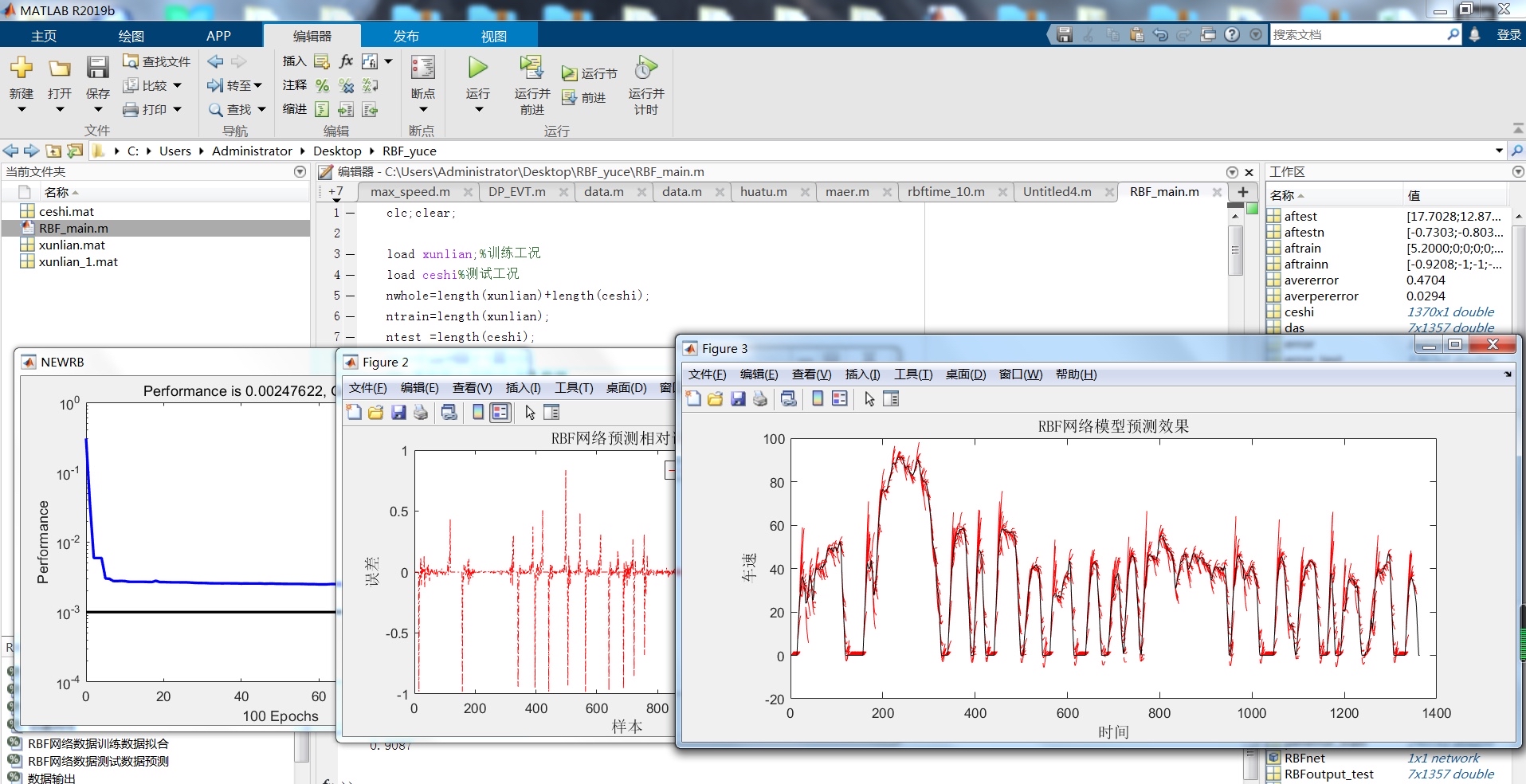
5.2 可视化分析
系统提供了丰富的可视化功能,包括:
- 预测值与真实值的对比曲线
- 预测误差随时间变化图
- 多步预测效果展示
这些可视化工具不仅帮助开发者理解模型行为,也使结果解释更加直观。
6. 技术特点与优势
6.1 模型优势
本实现具有几个显著优势:
- 时序关系捕捉:专门设计用于处理车速数据的时间依赖性
- 多步预测:能够同时预测多个未来时间点的车速
- 强泛化能力:通过独立的训练和测试流程确保模型实用性
- 实时性:RBF网络的快速推理特性适合实时应用场景
6.2 应用价值
该预测模型可以广泛应用于:
- 智能交通系统中的交通流预测
- 混合动力车辆的能量管理优化
- 自动驾驶系统的行为规划
- 车辆能耗预测与路线优化
7. 总结
本项目成功实现了一个基于RBF神经网络的车速时序预测系统,展示了神经网络在时间序列预测领域的强大能力。通过合理的数据预处理、网络结构设计和训练策略,模型能够准确捕捉车速变化的动态特性,并为各种智能交通应用提供可靠的预测支持。
代码设计考虑了实际应用需求,在预测精度和计算效率之间取得了良好平衡,为相关领域的研究和开发提供了有价值的参考。未来的工作可以探索更复杂的网络结构、多变量输入以及在线学习机制,以进一步提升模型的预测性能和适应性。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献126条内容
已为社区贡献126条内容

所有评论(0)