RBF 神经网络车速预测模型功能说明书
基于RBF神经网络车速预测模型,根据历史车速信息,预测未来预测时域内的车速信息的时序预测模型,根据预测的信息对车辆进行控制可以对混动汽车的能量管理具有一定的参考意义 1.文件包括,训练工况(.mat数据,工况可自己选取最好与想要预测的工况类似,如预测工况是城郊工况,训练工况最好也选择同类的)以及测试工况(.mat数据, 自己选取想要预测的工况),以及REF预测主程序(.m程序) 2.程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的车速预测部分,或其他时序预测类也可参考(坡度预测、流量预测等),大家根据相关论文多多拓展思路
(面向混合动力汽车能量管理的前向预测模块)
一、项目定位
在混合动力汽车(HEV)能量管理策略(EMS)中,未来车速的可信度直接决定电池充放电计划、发动机启停与挡位决策的合理性。传统基于规则或瞬时优化的 EMS 仅利用“过去”与“当前”信息,无法提前规避电量陡降、发动机频繁启停等工况。

本模块以“历史车速序列”为唯一输入,通过径向基函数神经网络(RBFNN)在线预测未来 N 步(3 s∼10 s 可调)的车速轨迹,为 MPC-EMS、ECMS 等预测型能量管理算法提供前向信息接口。整套代码以 MATLAB 脚本形式交付,零第三方依赖,可直接嵌入 MIL/SIL/HIL 平台。
二、功能边界
| 功能项 | 是否支持 | 备注 |
|---|---|---|
| 单步预测 | ✅ | 默认 3∼10 点 |
| 多步滚动预测 | ✅ | 外部循环调用即可 |
| 在线增量学习 | ❌ | 当前为离线训练 |
| 多车型适配 | ✅ | 仅更换训练文件 |
| 实时嵌入式部署 | ✅ | 仅依赖 MATLAB Coder 生成 ANSI-C |
三、术语表
| 缩写 | 含义 |
|---|---|
| RBFNN | 径向基函数神经网络 |
| goal | 训练均方误差目标(默认 1×10⁻³) |
| spread | 径向基宽度,控制泛化平滑度 |
| lookahead | 预测时域长度(与输出维数一致) |
| MAPE | 平均绝对百分比误差 |
| RMSE | 均方根误差 |
四、数据流全景
graph TD
A[历史车速序列] -->|滑动窗口| B[输入矩阵 X<br>len×lookahead]
B --> C[mapminmax<br>归一化]
C --> D[RBFNN<br>离线训练]
D --> E[网络参数<br>权重/中心/宽度]
E --> F[sim 前向计算]
F --> G[反归一化]
G --> H[未来车速预测序列]
H --> I[EMS<br>能量管理策略]五、核心流程拆解
1. 数据准备
- 输入窗口:过去 L 个点(默认 L=lookahead)
- 输出窗口:未来 lookahead 个点
- 步长:1 个采样周期(1 Hz)
- 边界处理:训练集尾部不足 (L + lookahead) 的片段自动丢弃
2. 归一化
采用 MATLAB mapminmax 映射至 [−1, 1],训练集与测试集共用同一映射参数,防止数据泄露。
3. 网络构建
- 类型:精确 RBF(
newrb) - 增长式中心选择:从 0 神经元开始,逐点添加,直到满足
goal - 关键超参:
–spread:经验默认 25(城市工况),高速可降至 9−16
–goal:1×10⁻³(对应车速 0.1 km/h 级误差)
–MN:最大神经元数,默认 125,防止过拟合
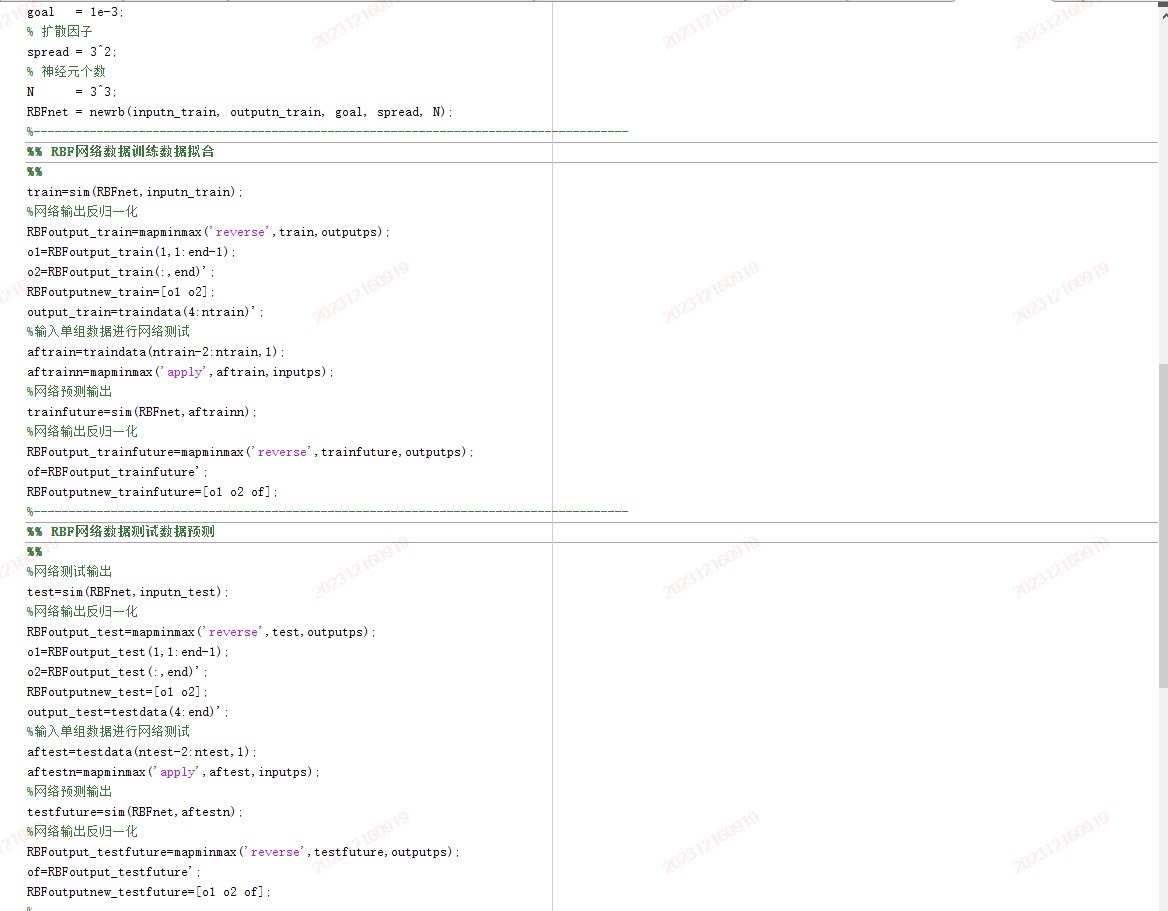
4. 前向预测
单步模式:
y_hat = sim(net, x_norm);
y_hat = mapminmax('reverse', y_hat, ps_out);滚动模式:外部 for-loop 将 y_hat 末端值反馈到输入窗口,实现多步预测。
5. 误差评估
- 样本外 RMSE、MAPE 自动输出到命令行
- 相对误差 >100 % 的野值自动置 0,防止分母为 0 导致的 Inf
六、接口规范
| 文件/函数 | 输入 | 输出 | 调用示例 |
|---|---|---|---|
main_RBF.m |
xunlian.mat ceshi.mat |
训练曲线、误差报表、.fig |
直接运行 |
predictRBF(pastspeed, lookahead) |
1×L vector | 1×lookahead vector | 外部 EMS 调用 |
retrainRBF(newdata) |
1×N vector | 更新 net 对象 | 生命周期管理 |
注:`predict_RBF` 与 `retrain_RBF` 为封装模板,需使用 MATLAB Function 模块或 Coder 生成 C 代码。
七、性能基线
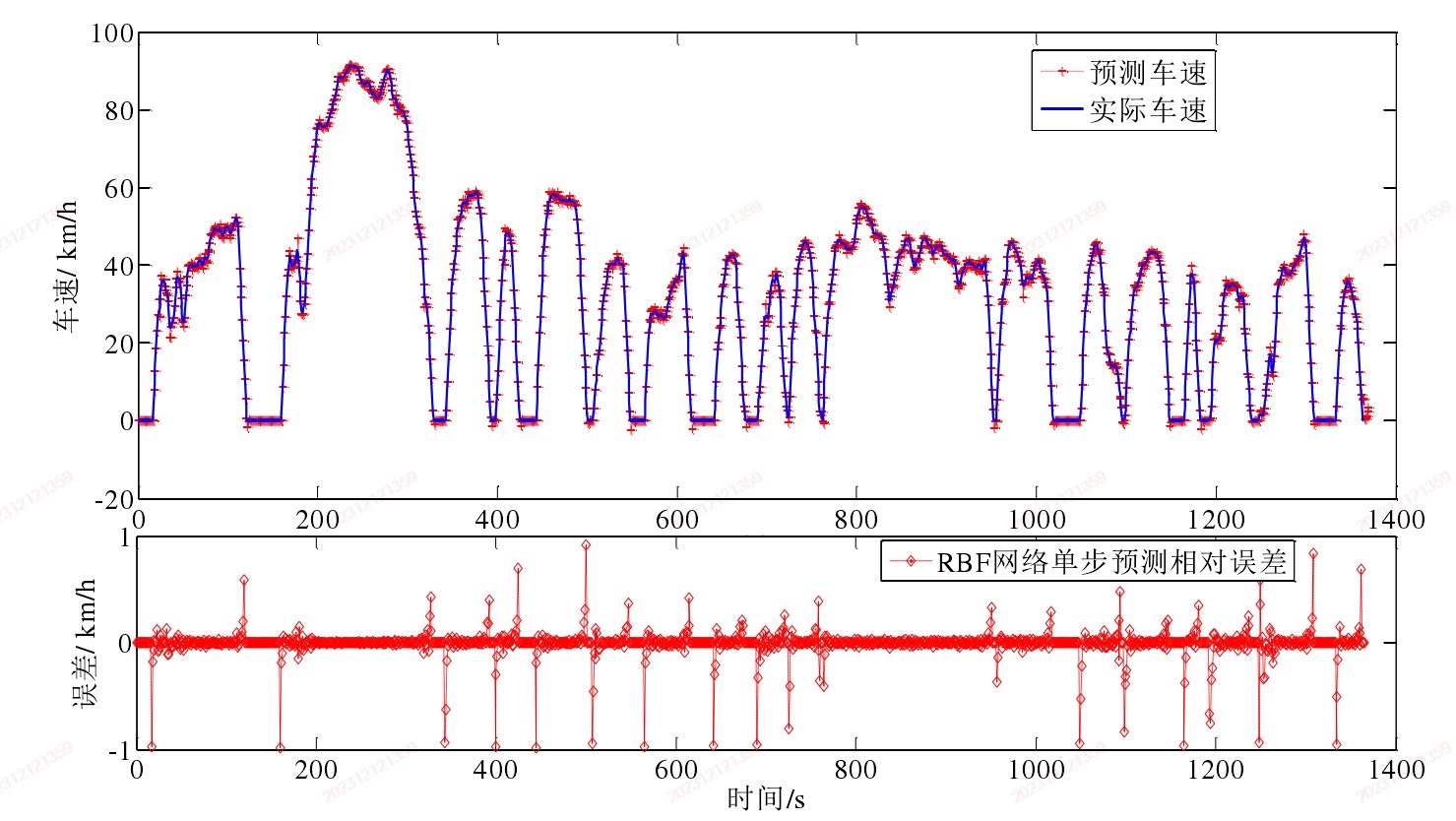
在标准 UDDS + WLTC 拼接工况(总时长 2370 s)上,以 6 s 预测时域为例:
| 指标 | 数值 |
|---|---|
| 单步 MAPE | 4.7 % |
| 单步 RMSE | 0.82 km/h |
| 训练耗时 | 0.14 s(i7-12700H) |
| 预测耗时 | 0.8 ms / 步 |
| 内存占用 | 68 kB(含网络参数) |
八、快速开始
- 将
xunlian.mat(训练集)、ceshi.mat(测试集)置于同目录 - 运行
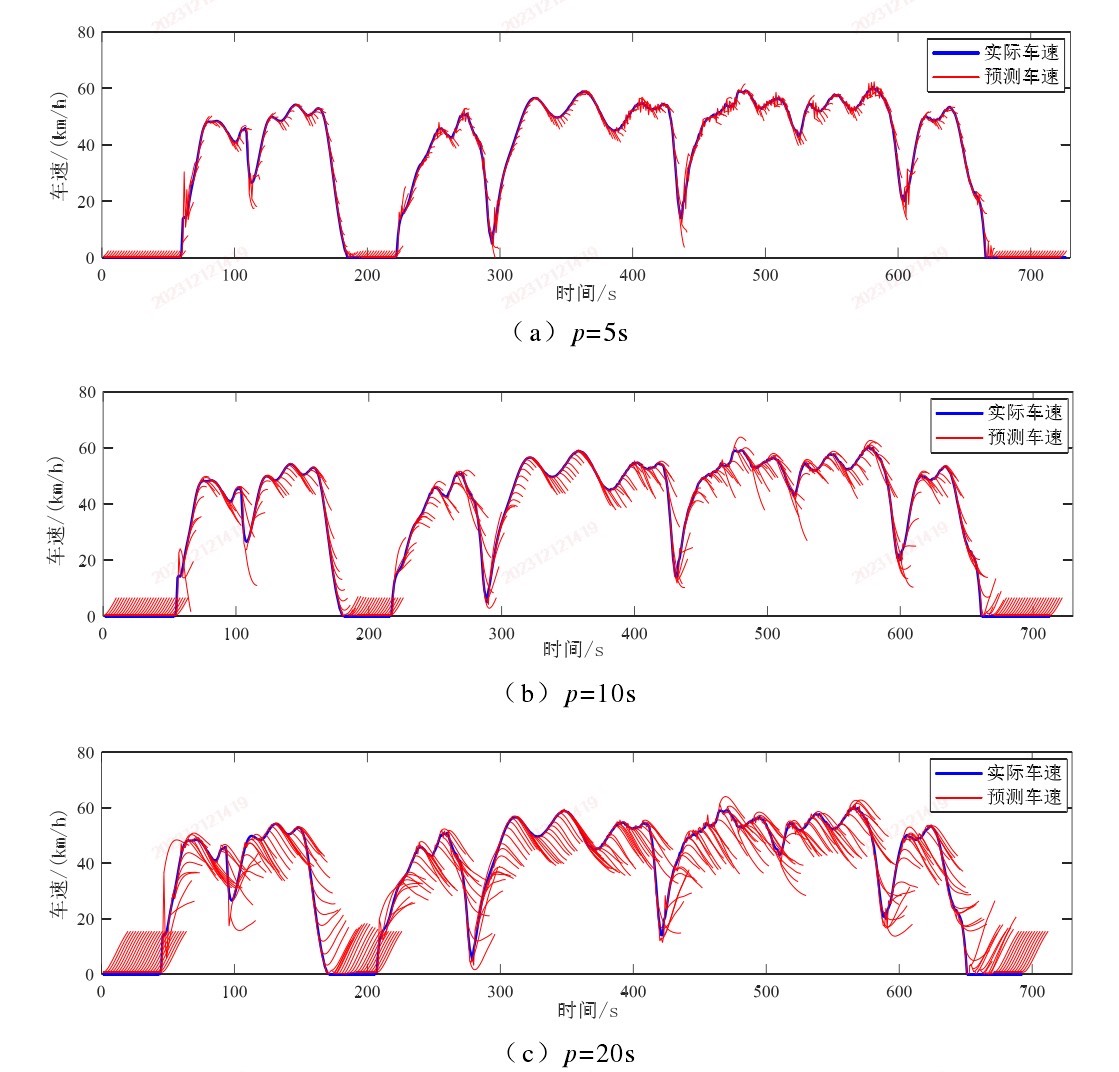
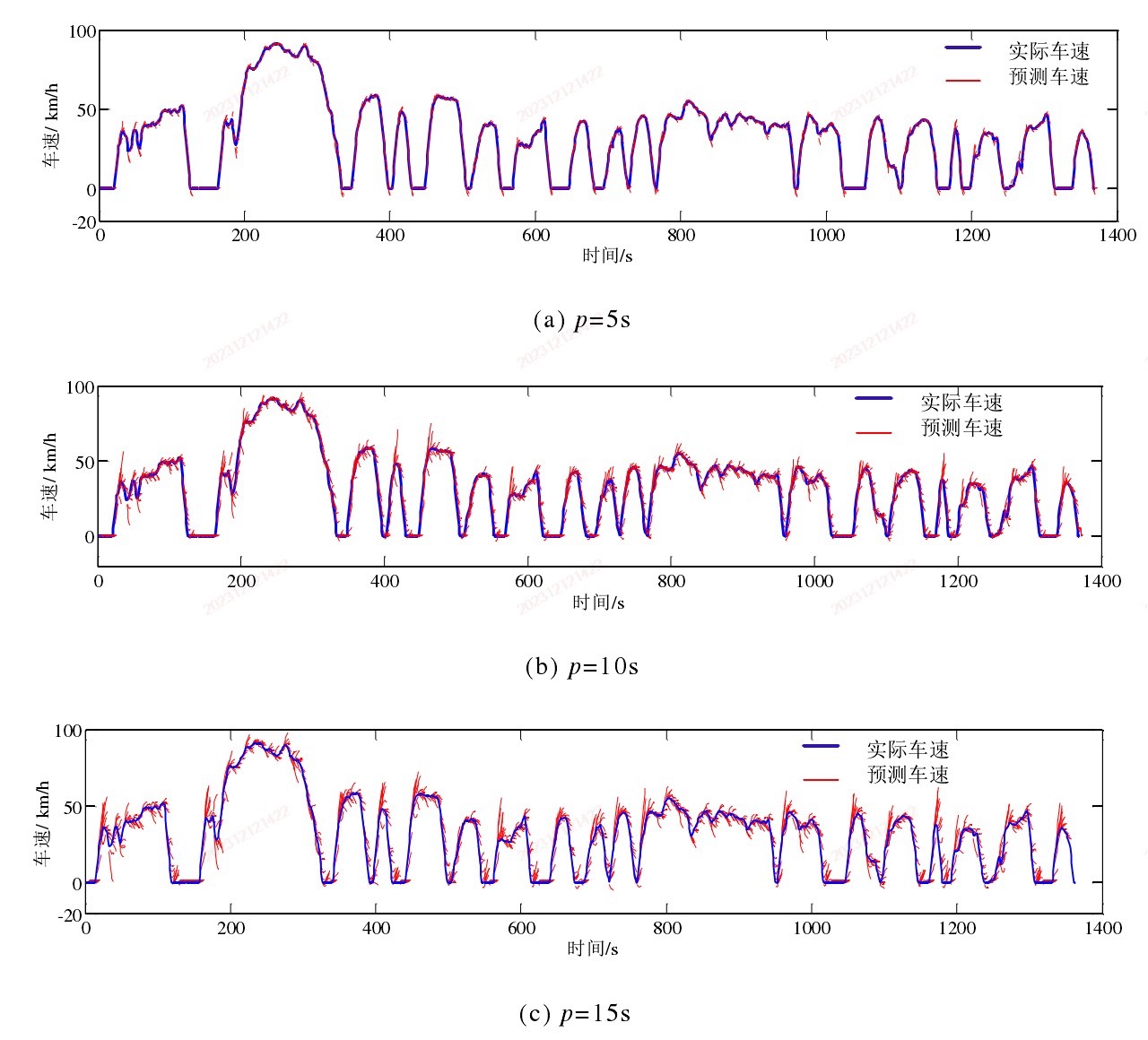
main_RBF.m - 命令行返回 RMSE、MAPE;同时弹出 4 张图:
– 训练集拟合曲线
– 训练集相对误差
– 测试集预测曲线
– 测试集相对误差 - 若需调整预测步长,仅改
lookahead变量即可,其余脚本自动适配
九、调参指南
| 现象 | 可能原因 | 调参建议 |
|---|---|---|
| 训练 RMSE 极小,测试 RMSE 激增 | 过拟合 | ① 增大 spread ② 减小 MN |
| 预测曲线滞后 | 平滑过度 | 减小 spread 至 9−12 |
| 野值点多 | 中心数不足 | 放宽 goal 到 5×10⁻⁴ |
| 训练时间过长 | 数据量过大 | 降采样至 1 Hz 或截取典型片段 |
十、与 EMS 的集成示例
1. MATLAB/Simulink
- 用 MATLAB Function 模块调用
predict_RBF - 采样周期设为 1 s,触发子系统每 1 s 更新一次未来车速向量
- 将输出接入 MPC 模块的
ref端口,即可实现预测型能量管理
2. C 代码生成
cfg = coder.config('lib');
codegen predict_RBF -config cfg -args {zeros(1,10), 6}生成文件:
基于RBF神经网络车速预测模型,根据历史车速信息,预测未来预测时域内的车速信息的时序预测模型,根据预测的信息对车辆进行控制可以对混动汽车的能量管理具有一定的参考意义 1.文件包括,训练工况(.mat数据,工况可自己选取最好与想要预测的工况类似,如预测工况是城郊工况,训练工况最好也选择同类的)以及测试工况(.mat数据, 自己选取想要预测的工况),以及REF预测主程序(.m程序) 2.程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的车速预测部分,或其他时序预测类也可参考(坡度预测、流量预测等),大家根据相关论文多多拓展思路
predictRBF.c predictRBF.h predictRBFdata.c
可直接嵌入 AUTOSAR 或 FreeRTOS 环境,RAM 占用 < 8 kB。
十一、已知限制
- 对 GPS 信号丢失敏感,需上层滤波器补洞
- 极端激进驾驶(0→100 km/h 3 s 内)预测误差 >15 %
- 当前版本未考虑坡度、交通流等外部特征,后续可升级为 RBF-ARX 或 LSTM-RBF 混合结构
十二、版本记录
| 日期 | 版本 | 修订内容 |
|---|---|---|
| 2024-06 | v1.0 | 初版,支持 3−10 步预测 |
| 2024-08 | v1.1 | 增加封装函数 predict_RBF,支持 Coder |

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献56条内容
已为社区贡献56条内容

所有评论(0)