惯性导航(IMU)原理入门(一)理论模型
1. 惯性导航系统的组成与数据流演进
惯性导航系统由底层传感器、误差补偿模块与导航解算算法构成的递进式数据处理链路。其系统架构与数据流向如下:
ISA惯性传感器组件→误差标定与数据补偿CcompIMU惯性测量单元→机械编排与航位推算MnavINS惯性导航系统(P,V,A) \underset{\text{惯性传感器组件}}{\text{ISA}} \xrightarrow[\text{误差标定与数据补偿}]{\mathcal{C}_{\text{comp}}} \underset{\text{惯性测量单元}}{\text{IMU}} \xrightarrow[\text{机械编排与航位推算}]{\mathcal{M}_{\text{nav}}} \underset{\text{惯性导航系统}}{\text{INS}} \big( \boldsymbol{P},\boldsymbol{V},\boldsymbol{A} \big) 惯性传感器组件ISACcomp误差标定与数据补偿惯性测量单元IMUMnav机械编排与航位推算惯性导航系统INS(P,V,A)
式中:
- ISAISAISA(Inertial Sensor Assembly)由三轴加速度计与三轴陀螺仪构成,直接感知物理量并输出含原始误差的传感器裸数据;
- Ccomp\mathcal{C}_{\text{comp}}Ccomp 为误差标定与数据补偿算子,负责消除零偏、比例因子及轴间耦合等确定性系统误差,结果为 IMU\text{IMU}IMU(Inertial Measurement Unit)的标准输出;
- Mnav\mathcal{M}_{\text{nav}}Mnav 为导航解算算法,通过对补偿后的比力与角速率进行坐标变换、重力剥离与地球曲率修正,并执行航位推算积分,最终解算生成 INS\text{INS}INS 的导航状态量:位置 P\boldsymbol{P}P、速度 V\boldsymbol{V}V 与姿态 A\boldsymbol{A}A。
本文聚焦于理想条件下 ISA\text{ISA}ISA 的理论输出特性,是后续构建误差模型、执行静态标定与推导机械编排方程的必要前提。
2. 惯性传感器组件(ISA)的理论输出模型
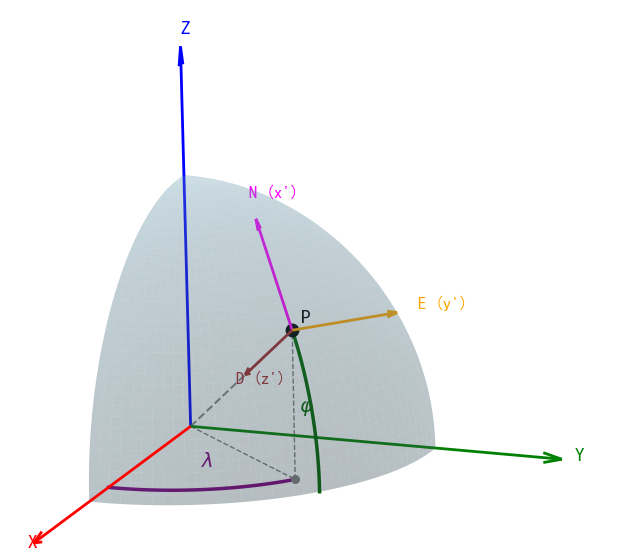
ISA 包含三轴加速度计与三轴陀螺仪,其本质是感知载体相对于惯性空间的运动状态。为建立严谨的数学表达,设定载体坐标系(b 系)的 X,Y,ZX, Y, ZX,Y,Z 轴分别与当地导航坐标系(n 系,采用北-东-地 NED 约定)完全对齐。
2.1 加速度计的理论输出:比力方程
加速度计测量的是载体相对于惯性空间的绝对加速度与地球万有引力加速度之差,该物理量被严格定义为比力(Specific Force,记为 f\boldsymbol{f}f)。其理论输出模型遵循比力方程:
f=a−g \boldsymbol{f} = \boldsymbol{a} - \boldsymbol{g} f=a−g
式中,a\boldsymbol{a}a 为载体的运动加速度,g\boldsymbol{g}g 为万有引力加速度。
根据该模型,可以推导不同状态下加速度计的理论输出:
- 静止状态:当载体静止于地面时(a=0\boldsymbol{a} = \mathbf{0}a=0),比力输出为 f=−g\boldsymbol{f} = -\boldsymbol{g}f=−g。在 b 系与 NED 系对齐的情况下,水平轴(北向、东向)理论输出为零,而垂直轴(地向)受到向上的支撑力,理论输出为 −g-g−g。
- 自由落体状态:当载体处于自由落体时(a=g\boldsymbol{a} = \boldsymbol{g}a=g),比力输出为 f=0\boldsymbol{f} = \mathbf{0}f=0。
2.2 陀螺仪的理论输出:角速度模型
陀螺仪用于测量载体相对于惯性空间的绝对角速度。对于在地球表面运动的载体,其陀螺仪感知到的总角速度由地球自转引起的静态分量与载体运动引起的动态分量耦合而成。
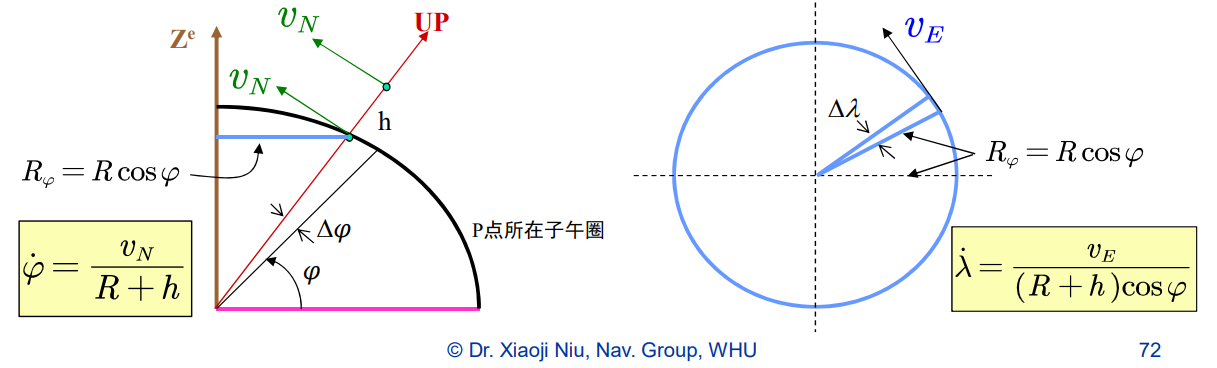
设定载体在地球表面以东向速度 vEv_EvE 和北向速度 vNv_NvN 行驶,当地纬度为 φ\varphiφ,高度为 hhh,地球等效半径为 RRR。此时,载体运动引起的经纬度变化率分别为:
φ˙=vNR+h \dot{\varphi} = \frac{v_N}{R+h} φ˙=R+hvN
λ˙=vE(R+h)cosφ \dot{\lambda} = \displaystyle\frac{v_E}{(R+h)\cos\varphi} λ˙=(R+h)cosφvE
- 东向(E)理论输出
思考运动过程:物体沿北(N)向移动时,NED 坐标系绕 E 轴旋转,地球自转自西向东不影响该过程,故 ωE\omega_{E}ωE 仅由纬度变化率决定。
方向遵循右手定则,四指指向 D 轴,像 N 轴弯曲,大拇指指向 E 轴。沿 N 轴运动时,坐标系自 N 向 D 旋转,故方向为负。
ωE=−φ˙=−vNR+h(动态分量) \omega_E = -\dot{\varphi} = -\frac{v_N}{R+h} \text{(动态分量)} ωE=−φ˙=−R+hvN(动态分量)
动图演示:
- 北向(N)理论输出
由经度变化率投影产生的动态分量与地球自转产生的静态分量叠加构成。
思考如下过程,λ˙\dot{\lambda}λ˙ 表示经度变化率,方向与自转轴相同,而除了点在赤道运动的情况外,N 轴与自转轴显然存在夹角 φ\varphiφ,即纬度。故 N 向输出需要乘上 cosφ\cos \varphicosφ,表示在该方向投影:
ωN=λ˙cosφ+ωecosφ=vER+h(动态分量)+ωecosφ(静态分量) \begin{aligned} \omega_N &= \dot{\lambda}\cos\varphi + \omega_e\cos\varphi \\ &= \frac{v_E}{R+h} \text{(动态分量)}+ \omega_e\cos\varphi \text{(静态分量)} \end{aligned} ωN=λ˙cosφ+ωecosφ=R+hvE(动态分量)+ωecosφ(静态分量)
可参考示意图: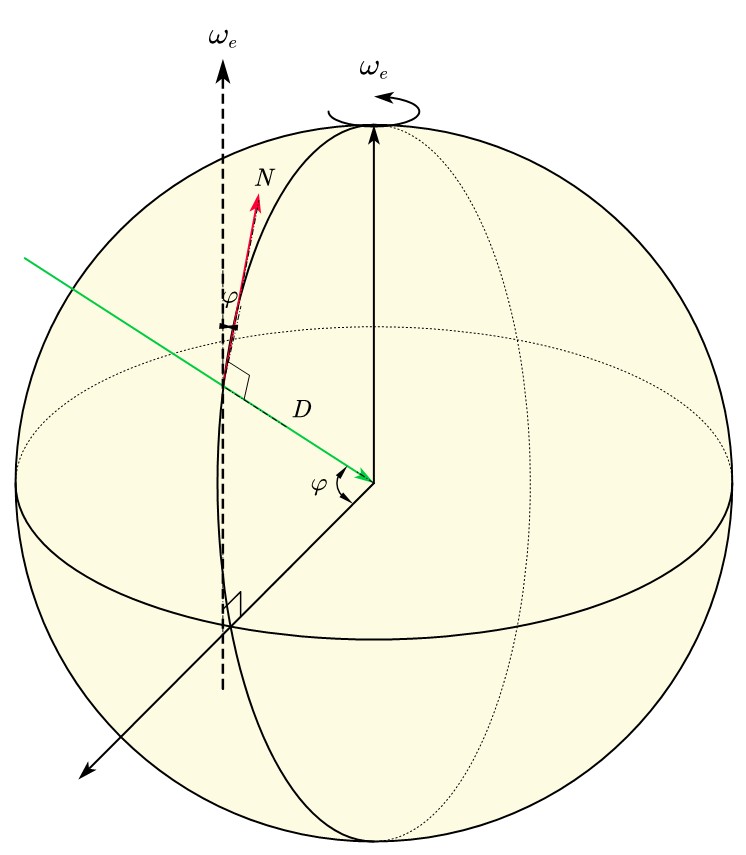
- 地向(D)理论输出
与 N 向同理,乘上 sinφ\sin \varphisinφ 即在 D 向上投影,方向为负。
ωD=−λ˙sinφ−ωesinφ=−vER+htanφ−ωesinφ \begin{aligned} \omega_D &= -\dot{\lambda}\sin\varphi - \omega_e\sin\varphi \\ &= -\frac{v_E}{R+h}\tan\varphi - \omega_e\sin\varphi \end{aligned} ωD=−λ˙sinφ−ωesinφ=−R+hvEtanφ−ωesinφ
综上,陀螺仪理论输出可以表示为:
ω=[ωNωEωD]=[(λ˙+ωe)cosφ−φ˙−(λ˙+ωe)sinφ]\displaystyle\omega = \begin{bmatrix} \omega_{N} \\ \omega_{E} \\ \omega_{D} \end{bmatrix} =\begin{bmatrix} (\dot{\lambda}+\omega_{e})\cos\varphi \\ -\dot{\varphi} \\ -(\dot{\lambda}+\omega_{e})\sin\varphi \end{bmatrix}ω=
ωNωEωD
=
(λ˙+ωe)cosφ−φ˙−(λ˙+ωe)sinφ
其中,λ˙=vE(R+h)cosφ\dot{\lambda} = \displaystyle\frac{v_E}{(R+h)\cos\varphi}λ˙=(R+h)cosφvE,φ˙=vNR+h\dot{\varphi} = \displaystyle\frac{v_N}{R+h}φ˙=R+hvN
参考文献:
[1] 武汉大学多源智能导航实验室. PPT:《惯性导航原理与方法》课程(2021年秋)

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 13
13 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)