异步电机模型预测电流控制(MPCC)的 Simulink 实现探索
异步电机模型预测电流控制/MPCC simulink搭建的异步电机模型预测电流控制模型,磁链观测器为电流型,加入了一延迟补偿和预励磁 附带说明文档和相关参考文献,模型已经调好,可跑出图中效果,默认发送2023b版本的simulink模型 模型相关可
最近在研究异步电机控制这块,和大家分享下基于 Simulink 搭建的异步电机模型预测电流控制模型的一些心得。
异步电机模型预测电流控制/MPCC simulink搭建的异步电机模型预测电流控制模型,磁链观测器为电流型,加入了一延迟补偿和预励磁 附带说明文档和相关参考文献,模型已经调好,可跑出图中效果,默认发送2023b版本的simulink模型 模型相关可
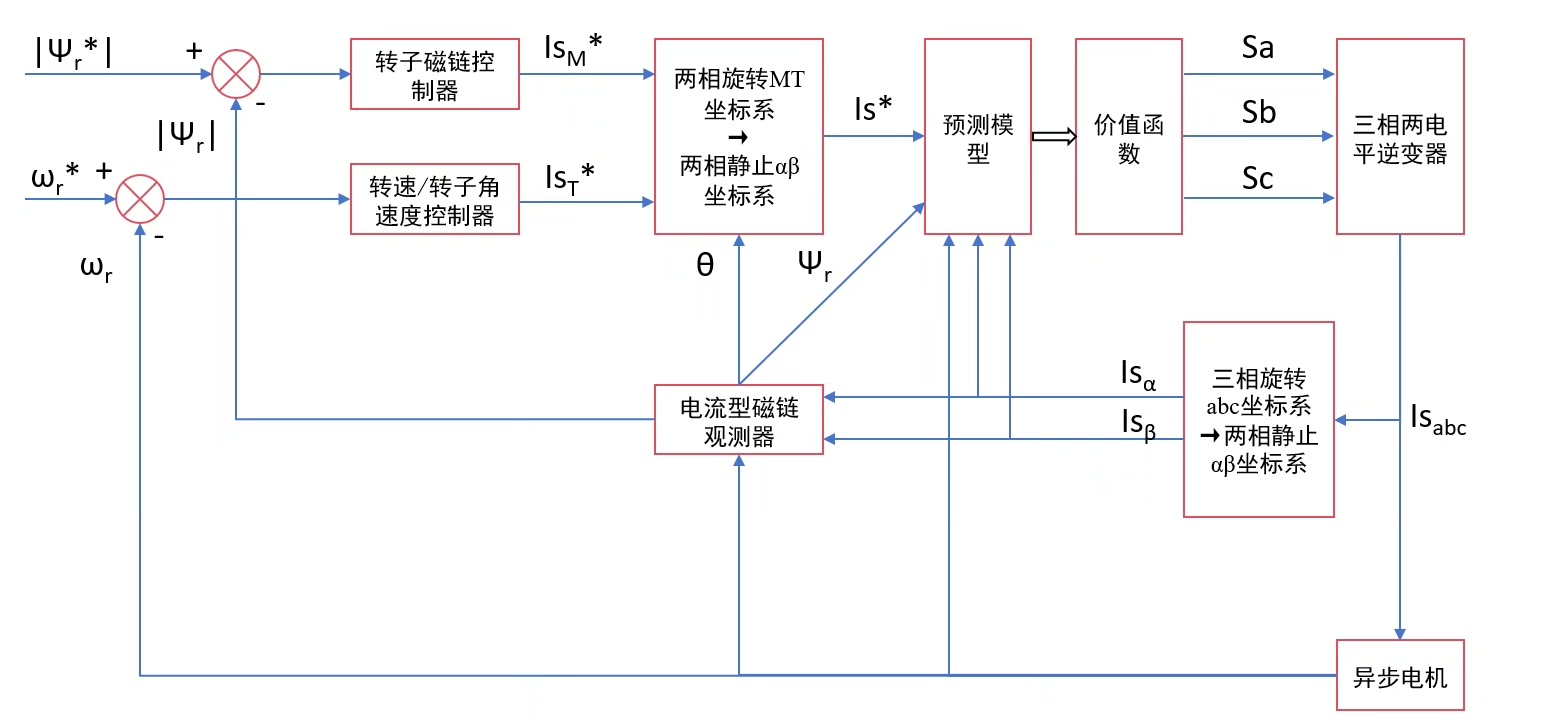
咱们先聊聊这个模型预测电流控制(MPCC)。简单来说,MPCC 就是通过预测电机未来的电流值,然后选择最合适的电压矢量,让电机实际电流尽可能跟踪上我们期望的电流值,就像给电机找了个“聪明的导航员”,指引电流往该去的方向流动。
模型搭建关键组件
磁链观测器
这里我采用的是电流型磁链观测器。在异步电机里,磁链可是个关键变量,它和电流、转矩等都紧密相关。电流型磁链观测器通过测量电机的电流来估算磁链。比如在 Matlab 代码里可能会有类似这样的核心逻辑(以下代码为示意简化,实际应用更复杂):
% 假设已经获取到定子电流 is 和一些电机参数
Rs = 1; % 定子电阻
Lls = 0.1; % 定子漏感
Lm = 0.5; % 互感
Llr = 0.1; % 转子漏感
Rr = 1; % 转子电阻
omega_r = 0; % 初始转子角速度
% 估算转子磁链
psi_r = (Lm * is) / (1 + (Rr / (1j * omega_r)) * (Llr + Lm));这里通过定子电流 is 以及电机的电阻、电感等参数来估算转子磁链 psi_r 。这个估算值对于后续准确预测电流和控制电机性能起着重要作用。
延迟补偿
在实际系统中,信号传输和计算总是会存在延迟,这对电机控制精度影响可不小。为了应对这个问题,模型里加入了延迟补偿。比如说在 Simulink 里,可以通过一些模块来实现类似的功能,像是使用“Transport Delay”模块来模拟延迟,然后再通过补偿算法去抵消这个延迟的影响。从代码角度,假设系统有一个固定的采样时间 Ts 延迟,我们可以这样补偿:
% 假设当前时刻电流预测值 ipred
% 上一时刻电流预测值 ipred_prev
% 延迟补偿系数 k
ipred_compensated = ipred + k * (ipred - ipred_prev);这里 k 是根据实际系统情况调整的系数,通过这样简单的运算,让预测电流值能更及时准确地反映实际情况,就好像给预测值“打了一针兴奋剂”,让它能追上理想的控制节奏。
预励磁
预励磁是为了让电机在启动前就建立起合适的磁场,这样电机启动时就能更平稳、快速响应。在 Simulink 模型里,可能会设置专门的环节,在电机启动前给它输入特定的励磁电流。代码方面,可以在初始化部分加上这样的逻辑:
% 预励磁电流设定值
I_pre = 1;
% 初始化阶段,设置定子电流为预励磁电流
is = I_pre; 通过在启动前给电机一个合适的预励磁电流,就像给运动员在起跑前做好热身准备,电机启动起来自然更带劲。
效果展示与模型分享
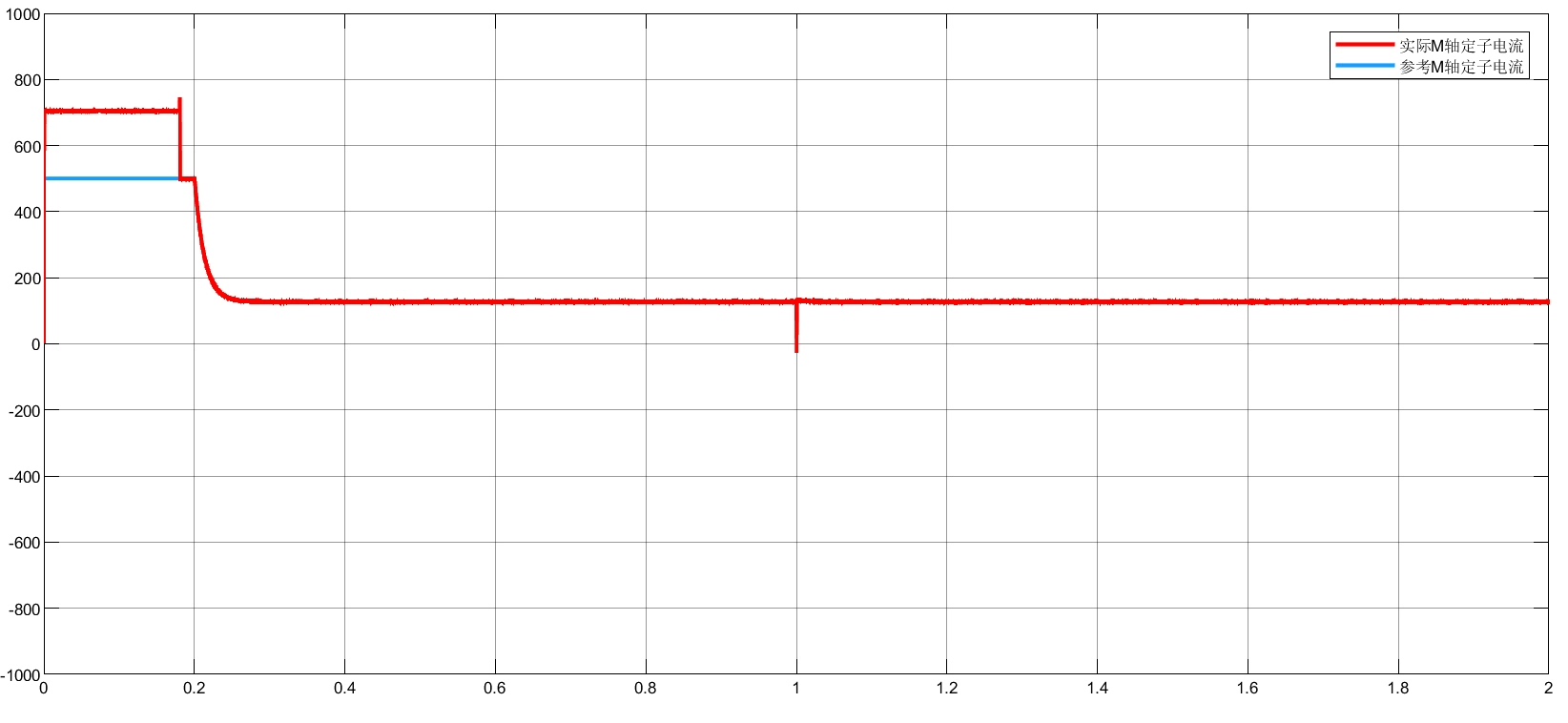
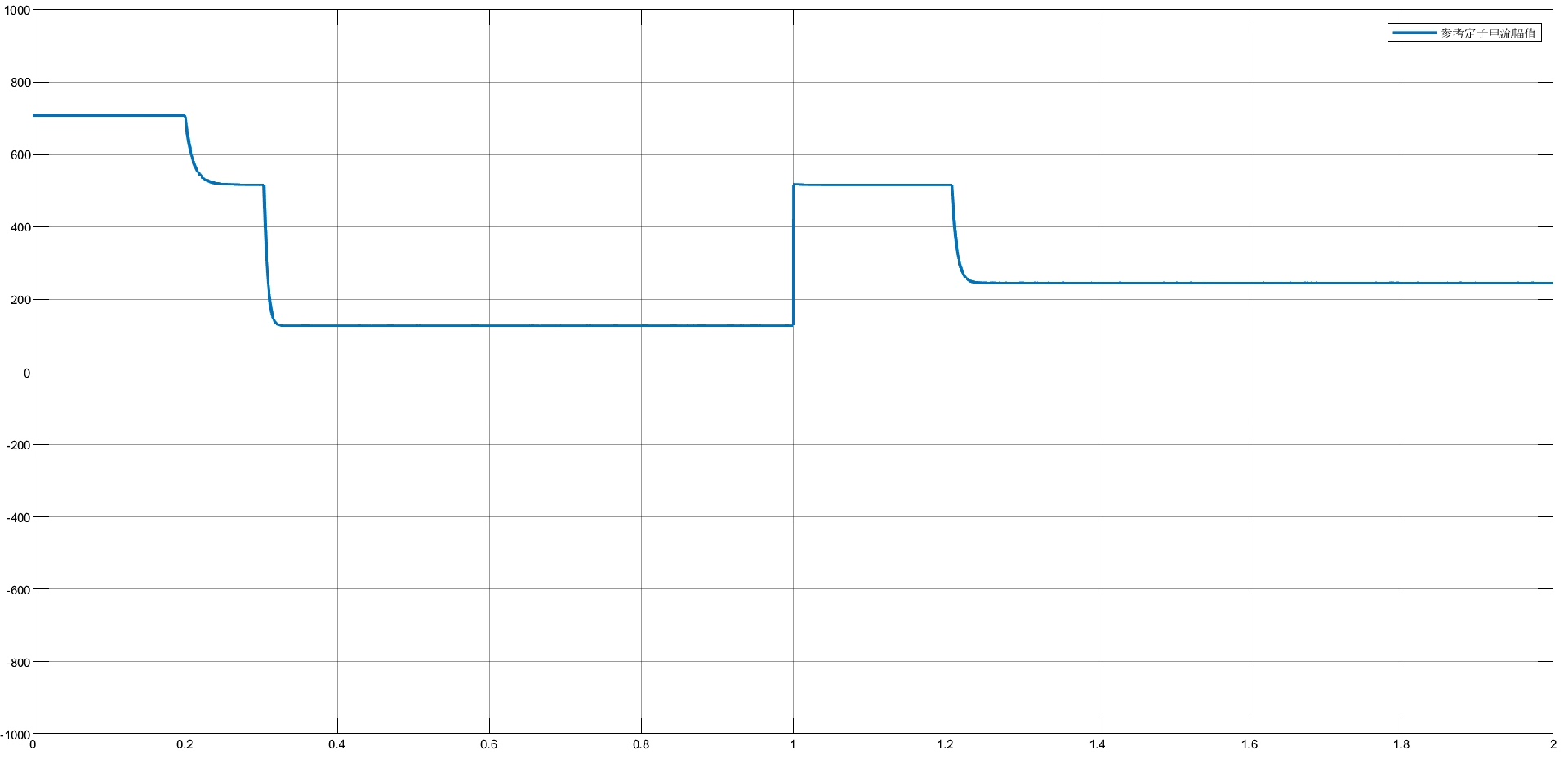
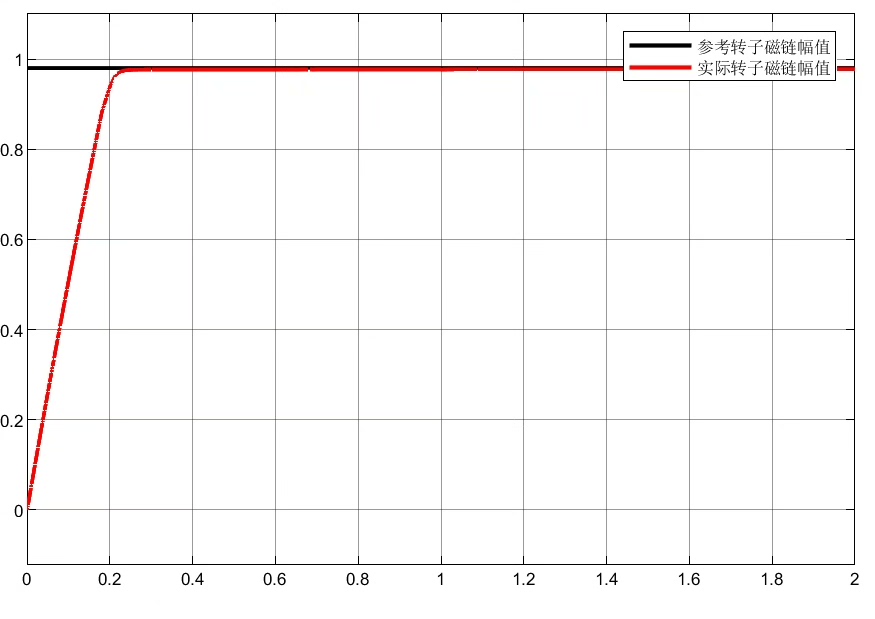
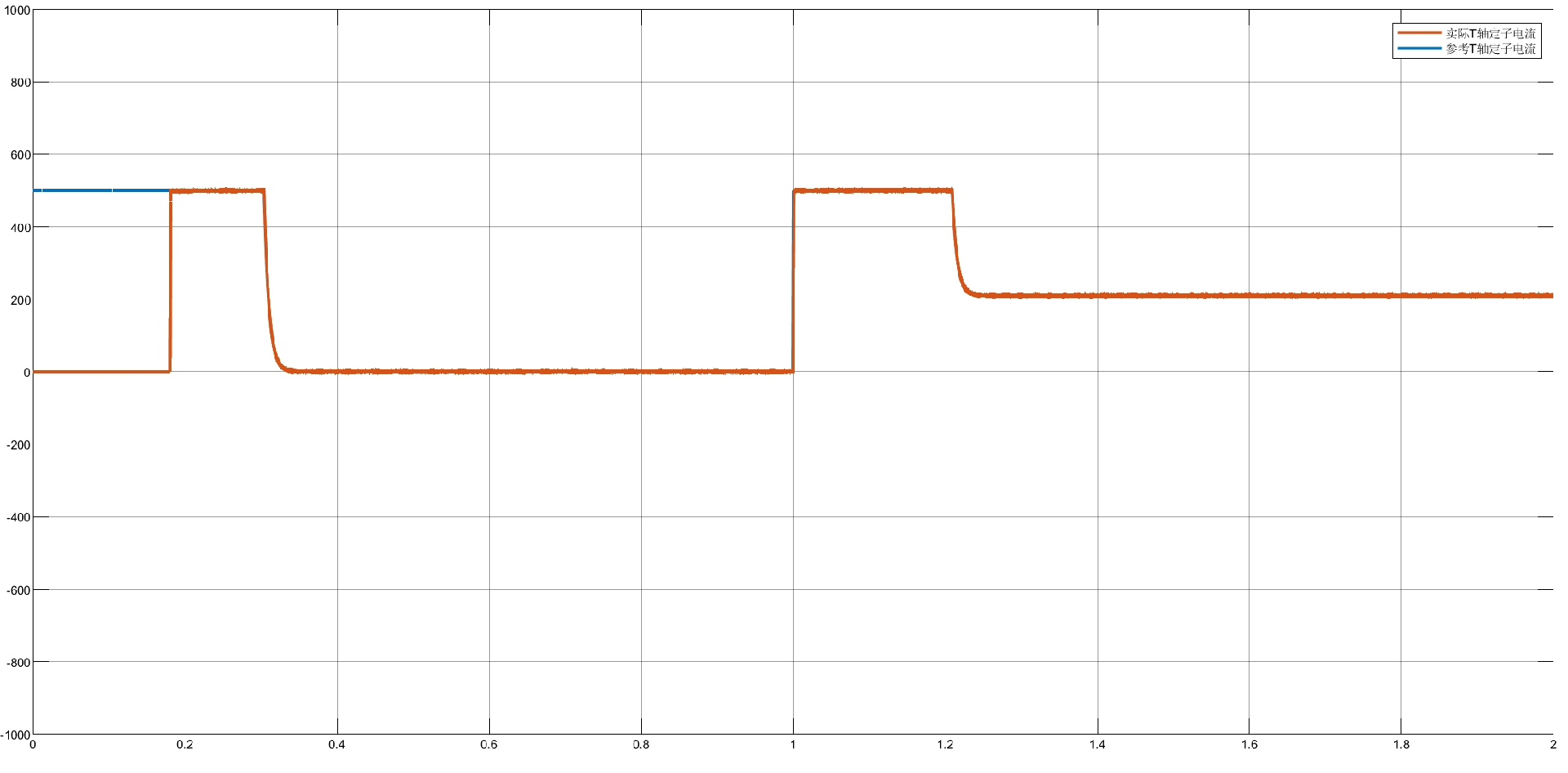
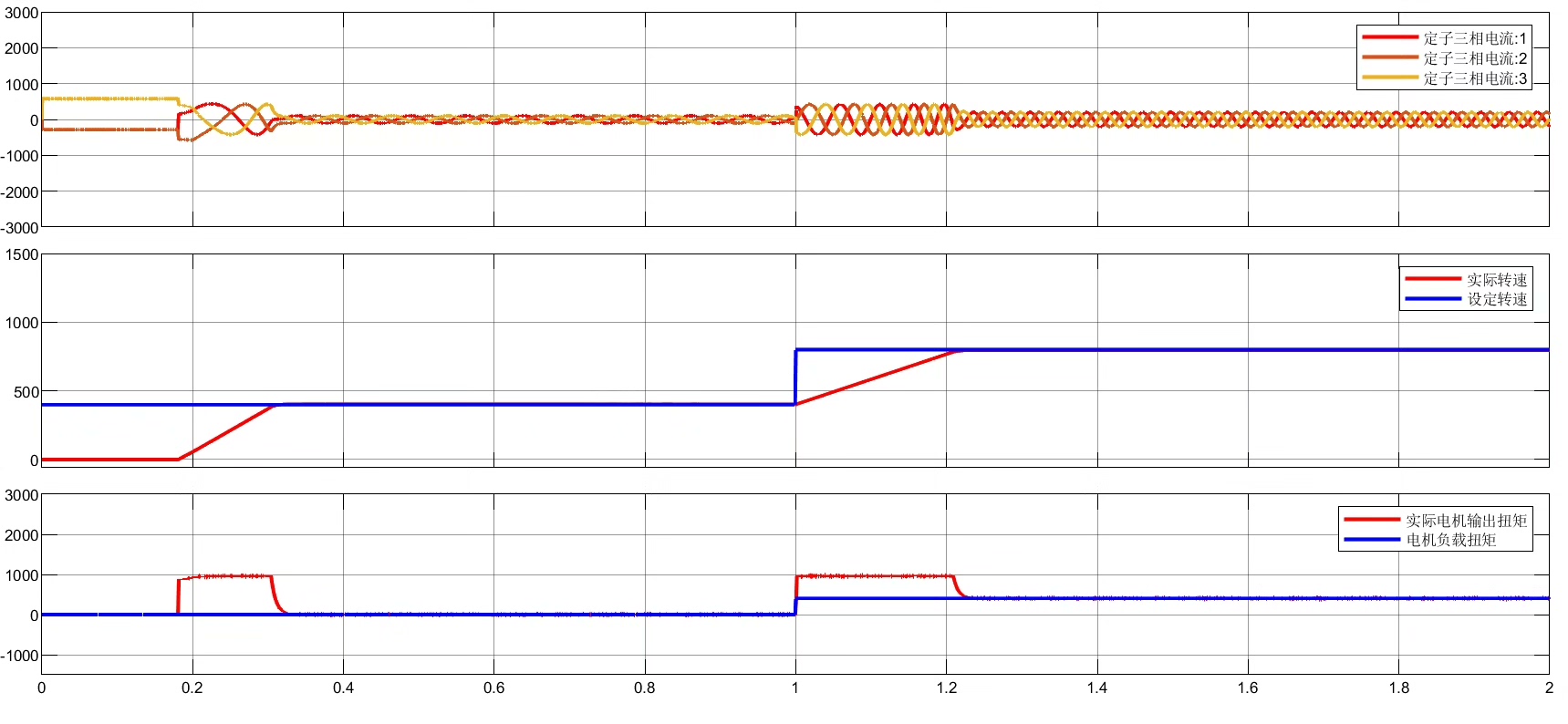
这个调好的模型已经能跑出图中的效果啦(可惜这里没办法直接展示图,大家可以自己想象下电机电流稳稳跟踪期望电流的那种丝滑效果~)。同时呢,还附带了说明文档和相关参考文献,帮助大家更好地理解模型原理和使用方法。如果有需要,默认会发送 2023b 版本的 Simulink 模型哦,大家可以在此基础上进一步研究、改进,说不定能发现更多好玩的控制策略。
总之,异步电机的模型预测电流控制是个很有意思也很有实用价值的领域,希望这个分享能给对这块感兴趣的小伙伴一些启发和帮助。咱们一起在电机控制的“代码海洋”里继续探索吧!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 5
5 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)